Bleg
Bleg
关节电机驱动板
3/5
🧩 软硬件结合
已发布

项目简介
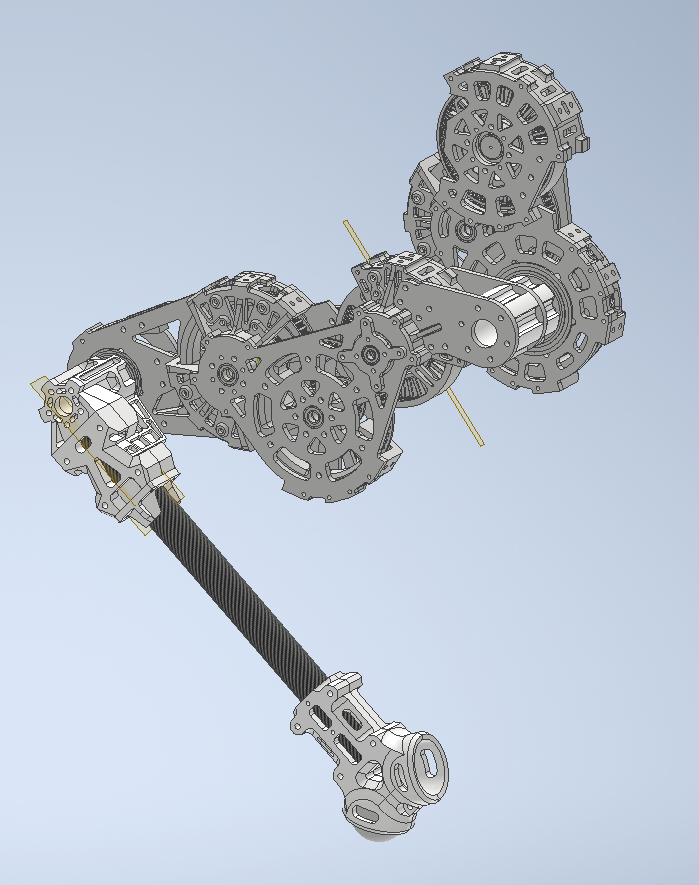
开源低成本四足腿设计,采用BLDC执行器。
Bleg 是一个开源、低成本的四足机器人腿部设计项目,核心目标是为机器人爱好者和研究者提供一套可复现、高性能的腿部执行器方案。项目采用 BLDC(无刷直流电机)作为驱动核心,配合自主设计的减速器、编码器和主控板,实现了高力矩密度、低惯量和精确位置控制,非常适合用于四足机器人的动态行走、跳跃等运动控制研究。
项目特点
**开源与低成本**:所有设计文件均开源,旨在降低四足机器人腿部执行器的成本。
**BLDC执行器**:采用高性能无刷直流电机作为驱动核心,提供高扭矩和精确控制。
**完整硬件设计**:提供CAD、STL导出文件和CAM文件,方便用户进行3D打印和制造。
**配套电子系统**:包含电机驱动(Odrive v3.6)、主控制器板和编码器板的设计。
**仿真支持**:提供V-rep仿真环境和Python封装,便于算法开发和验证。
技术规格
| 执行器类型 | BLDC(无刷直流电机) |
|---|---|
| 电机驱动 | Odrive v3.6 |
| 控制方式 | 主控制器板 + 编码器板 |
| 仿真环境 | V-rep (CoppeliaSim) + Python wrapper |
| 硬件文件格式 | CAD, STL, CAM |
| 开源协议 | MIT License |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| BLDC电机 | 1 | — | 具体型号待从硬件文件确认 |
| Odrive v3.6 | 1 | — | 电机驱动板 |
| 主控制器板 | 1 | — | 项目自设计 |
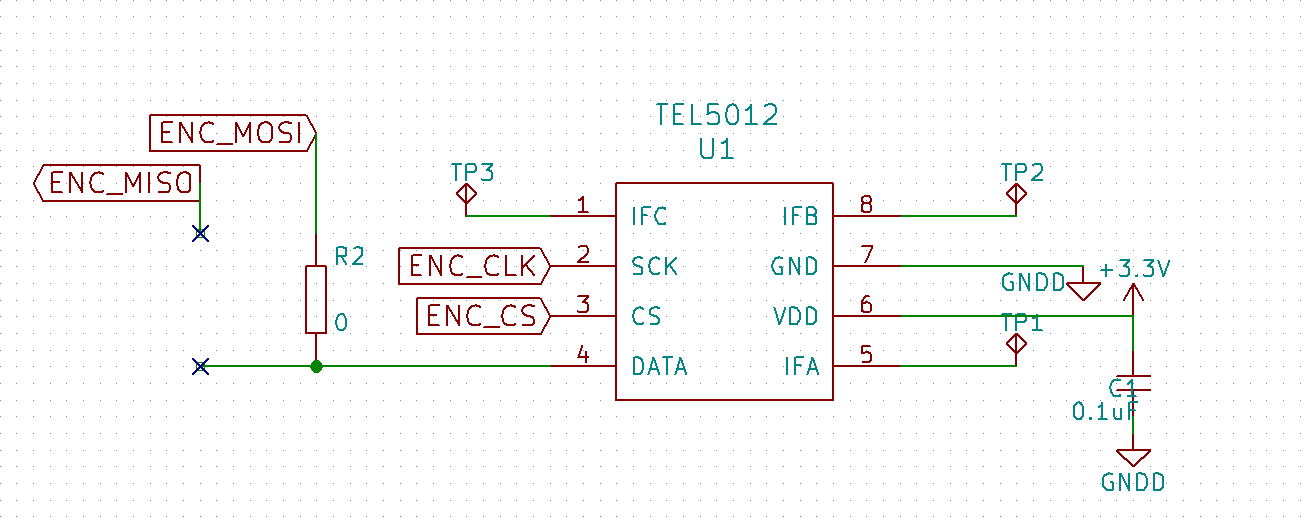
| 编码器板 | 1 | — | 项目自设计 |
| 3D打印件 | 若干 | — | 包括腿部连杆、外壳等 |
| 减速器组件 | 1 | — | 项目自设计 |
| 螺丝、轴承等标准件 | 若干 | — | 详见CAD文件 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 3/5
项目图库











所需技能
🔧 **动手能力**:需要熟练使用3D打印机进行零件制造,并具备机械组装能力;需要焊接电子元件(主控板、编码器板)。
💻 **编程能力**:需要具备Python编程基础,用于仿真和控制算法开发;可能需要了解V-rep仿真环境。
⚡ **电子电路**:需要理解BLDC电机驱动原理,能够调试Odrive驱动板;需要能够设计和调试编码器电路。
适用场景
**机器人研究**:作为四足机器人腿部执行器的低成本研究平台。
**教育项目**:用于大学或研究机构的机器人课程,让学生实践从硬件到控制的完整流程。
**DIY机器人**:为机器人爱好者提供一个可复制的、高性能的腿部执行器方案。
**算法验证**:利用提供的V-rep仿真环境,进行步态规划、运动控制等算法的开发与测试。