MARPY - 最实惠的ROS2机器人平台
MARPY
ROS
3/5
🧩 软硬件结合
已发布

项目简介
低成本开源3D打印机器人平台,用于学习ROS 2,支持真实硬件与仿真。
一个低成本、开源、3D打印的机器人平台,用于通过真实硬件和仿真学习ROS 2。
项目特点
**极低成本**:总零件成本低于50美元,是学习ROS2最实惠的硬件平台之一
**开源完整**:硬件设计、固件、ROS2软件栈全部开源,可自由修改和扩展
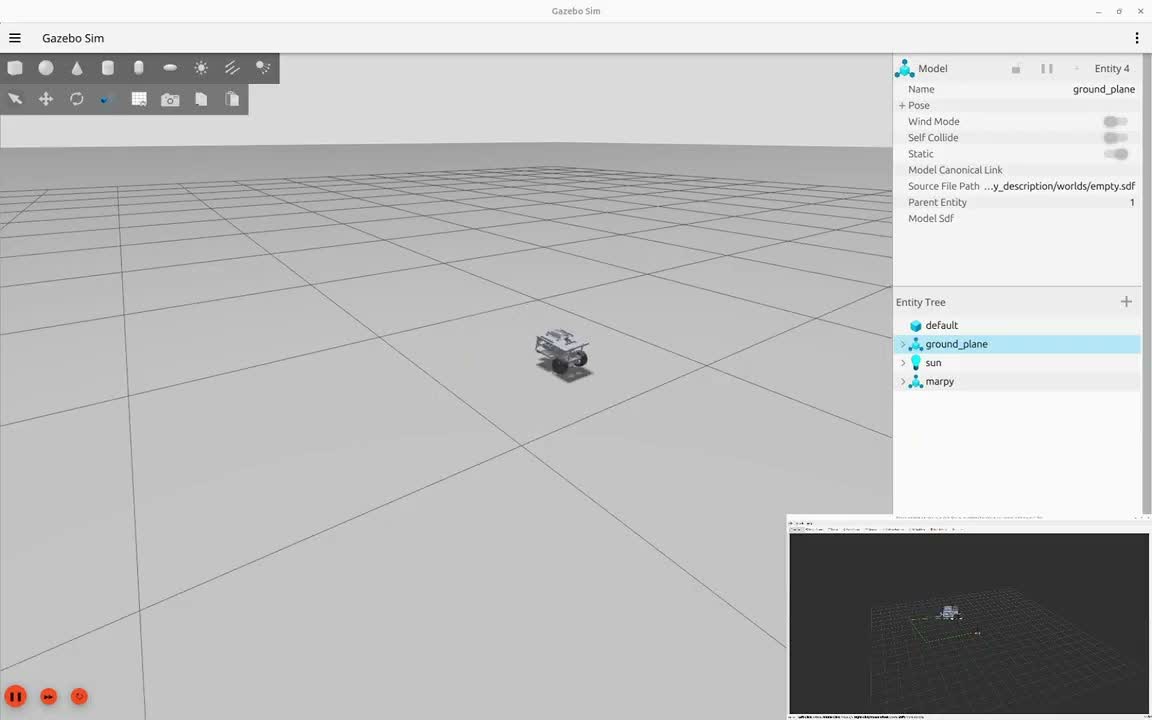
**真实+仿真双模式**:支持真实机器人驾驶和Gazebo仿真,无https://raw.githubusercontent.com/LevinTamir/MARPY/main/docs/bom.md完整教程**:从BOM到组装、接线、固件、ROShttps://raw.githubusercontent.com/LevinTamir/MARPY/main/docs/assembly.md块化设计**:支持扩展ESP32-CAM摄https://raw.githubusercontent.com/LevinTamir/MARPY/main/docs/wiring.md**基于最新ROS2**:使用ROS2 Jahttps://raw.githubusercontent.com/LevinTamir/MARPY/mhttps://raw.githubusercontent.com/LevinTamir/MARPY/main/docs/bom.md)etup.md术栈
项目资源
搜索资源
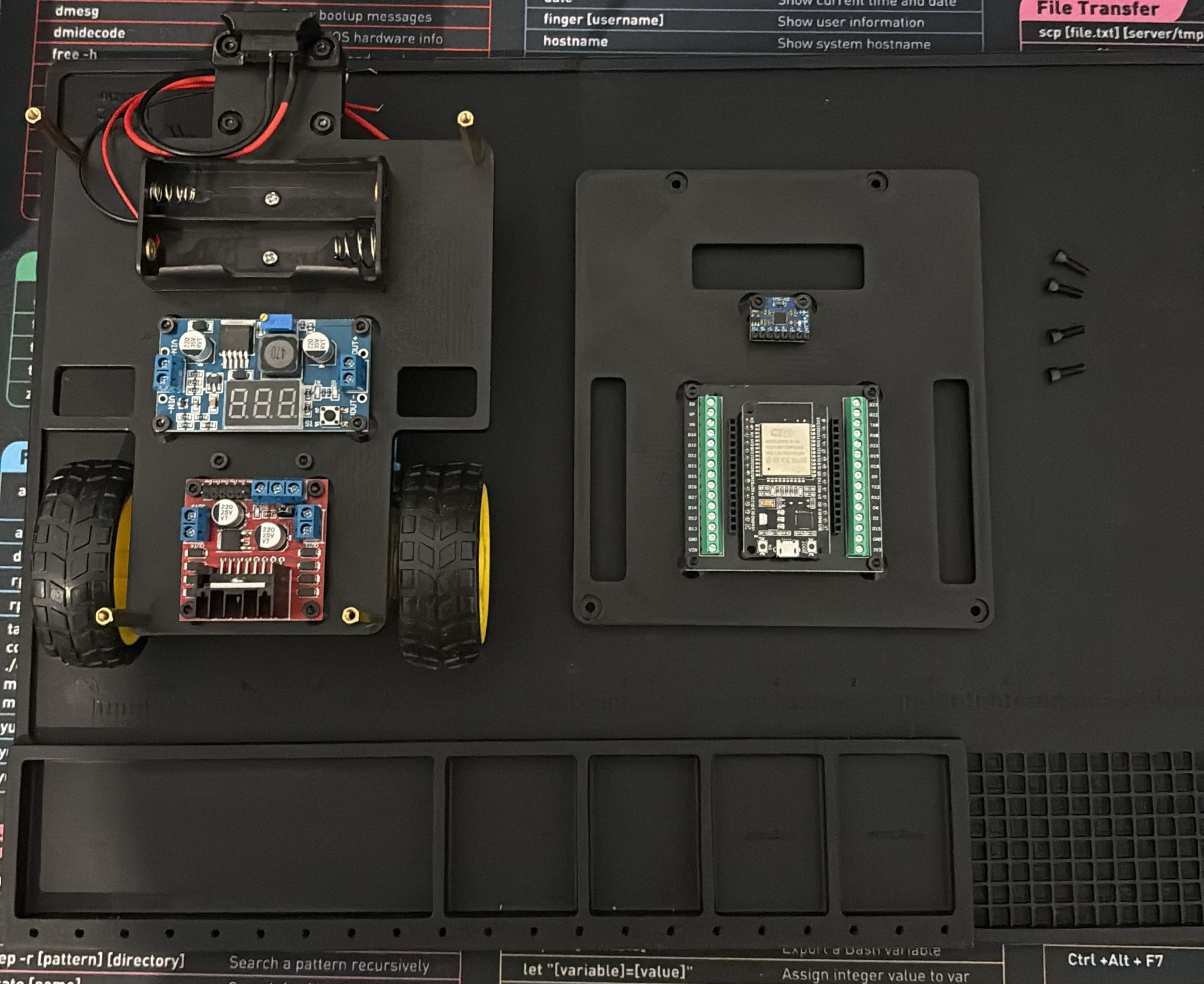
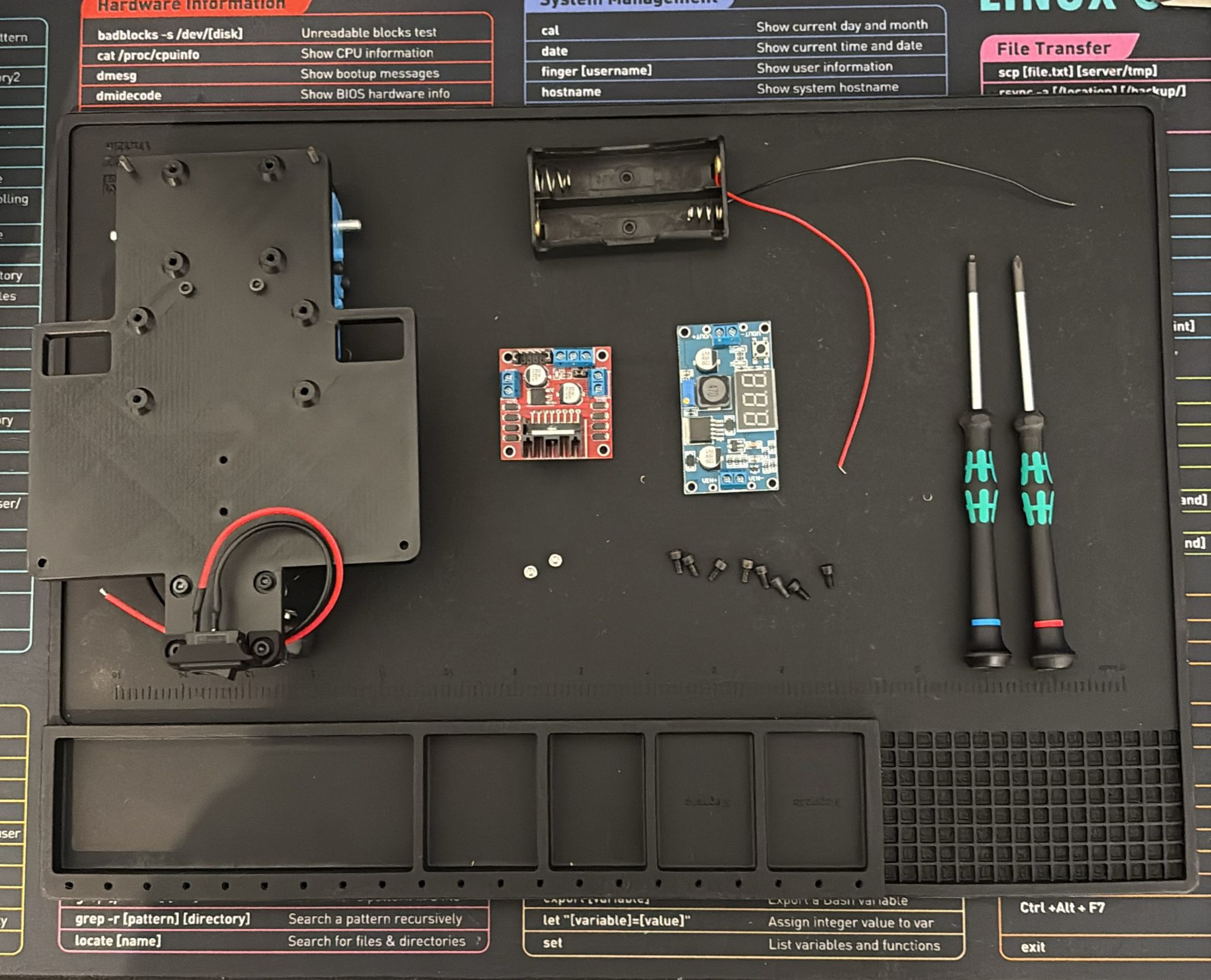
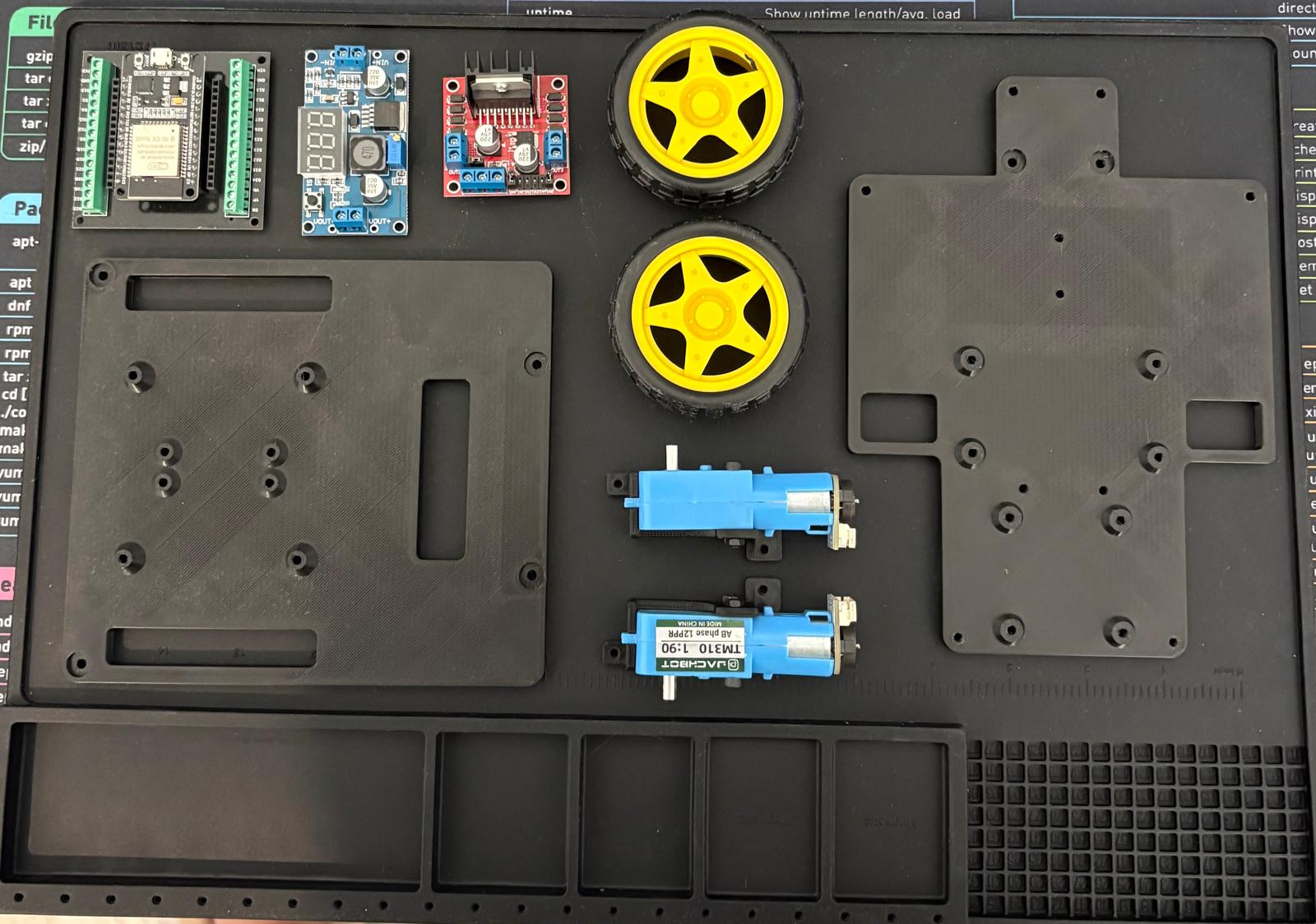
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
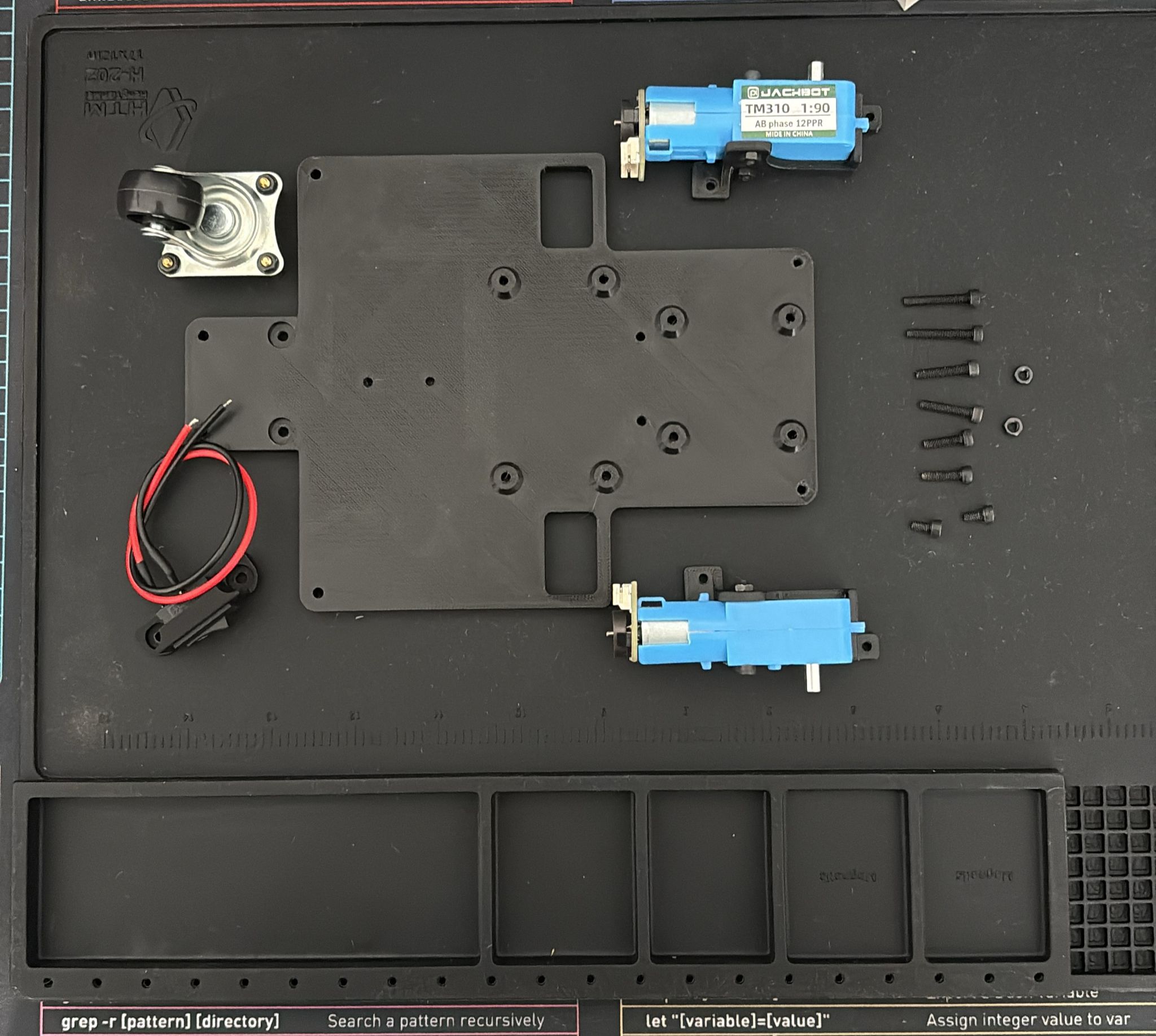
| 3D打印零件 | 1套 | — | 需自行打印 |
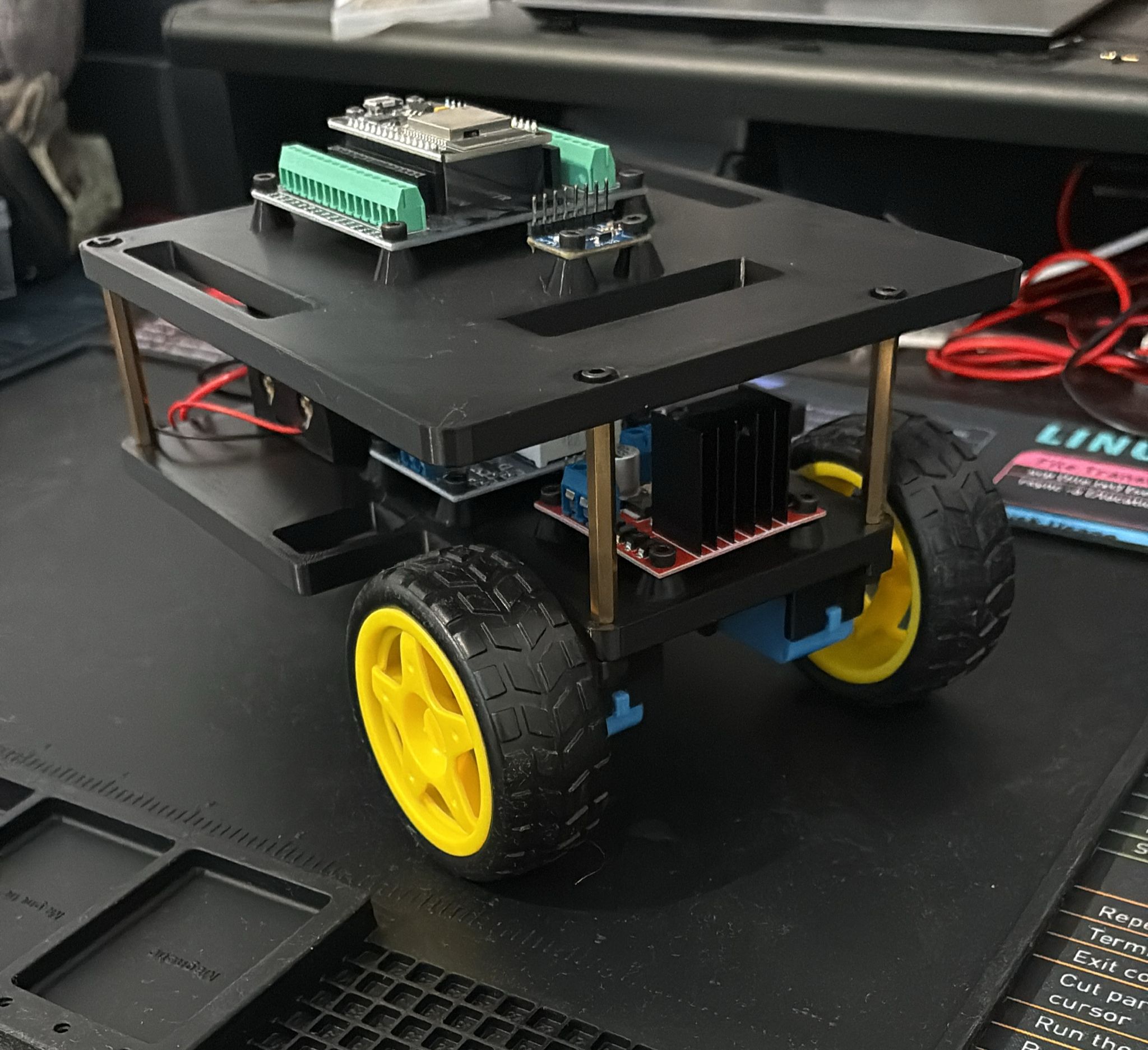
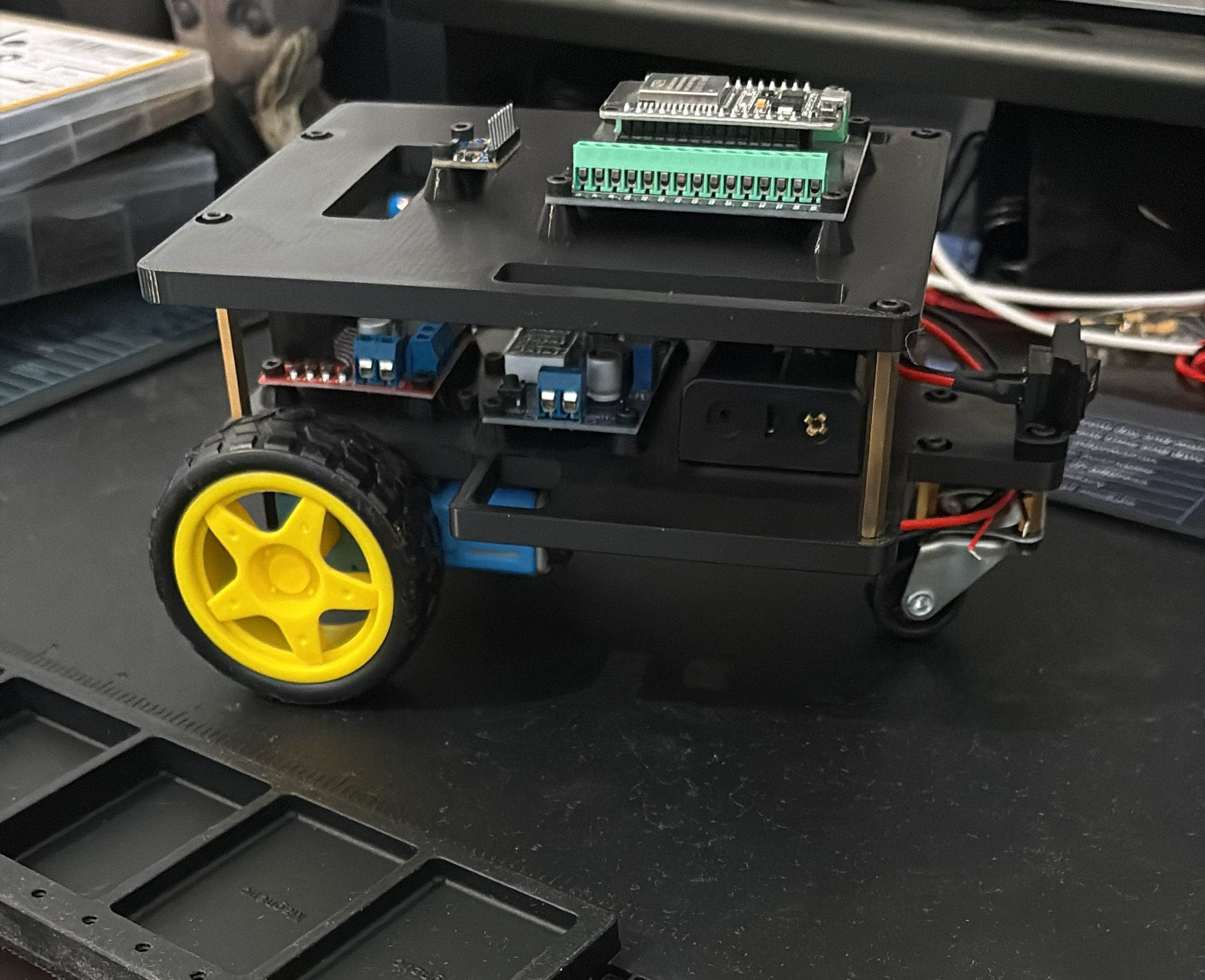
| ESP32开发板 | 1 | — | 运行micro-ROS |
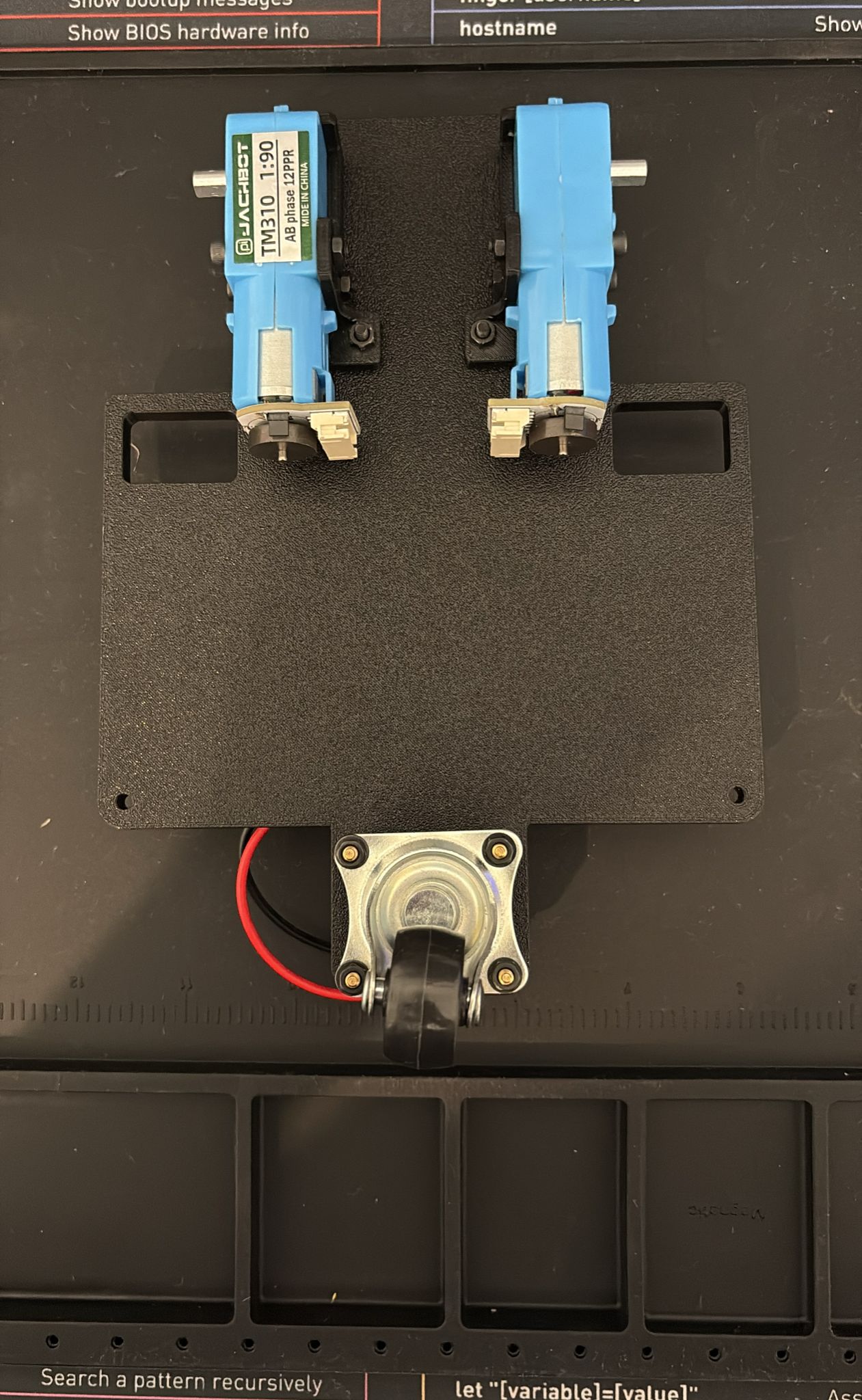
| 直流减速电机(带编码器) | 2 | — | 差速驱动 |
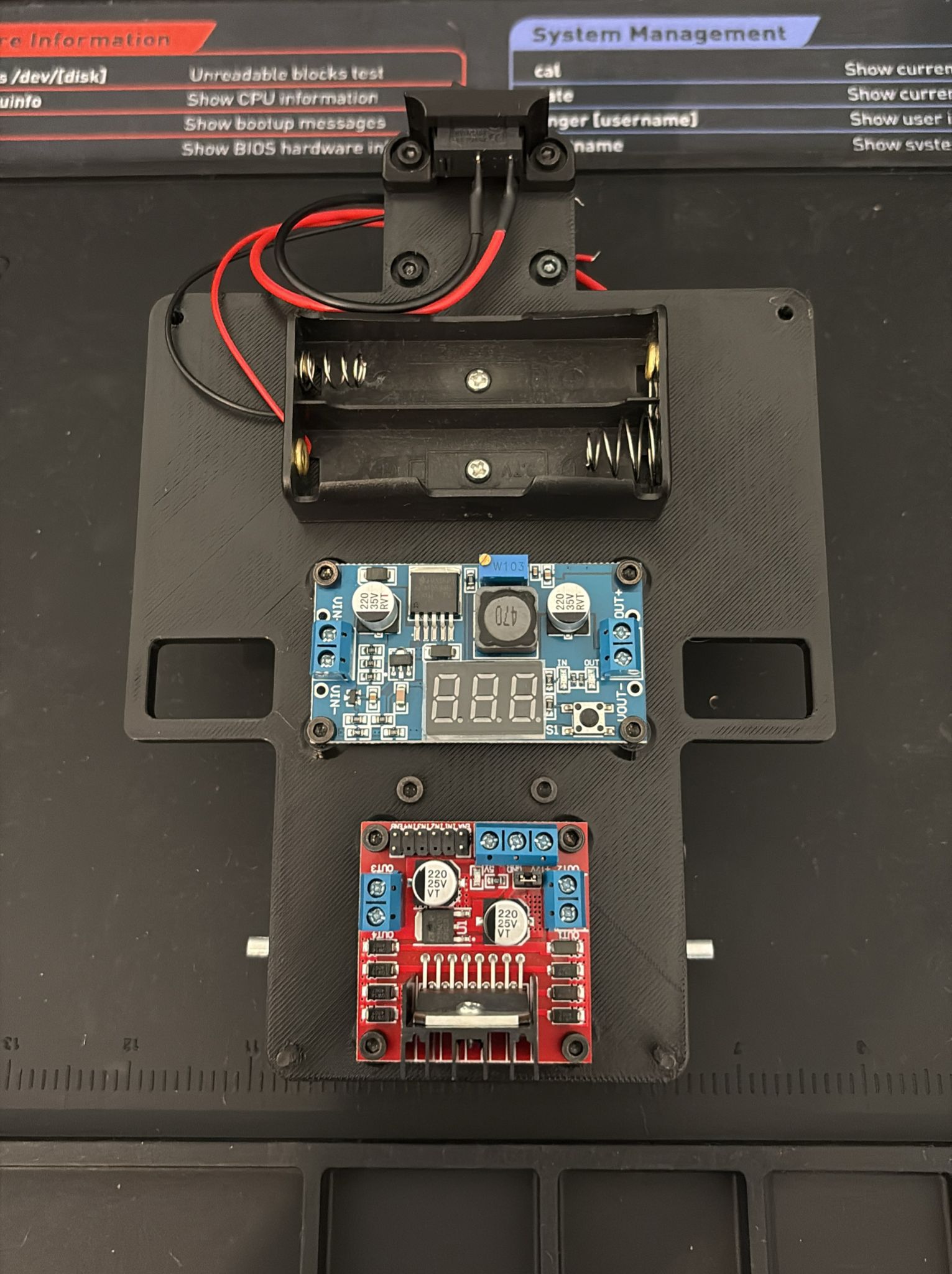
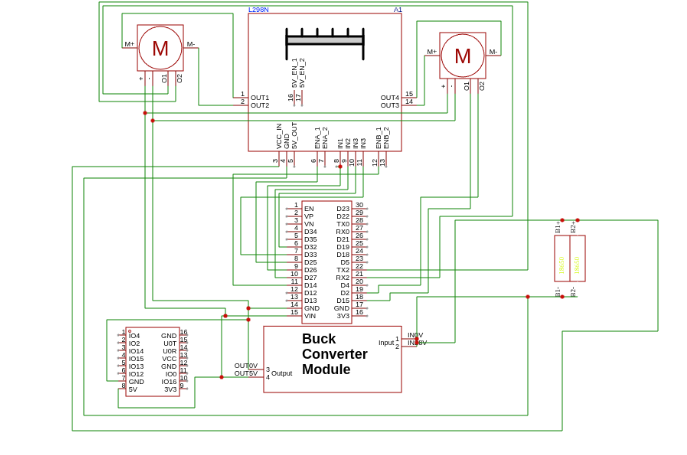
| 电机驱动板(如L298N或TB6612) | 1 | — | 控制电机 |
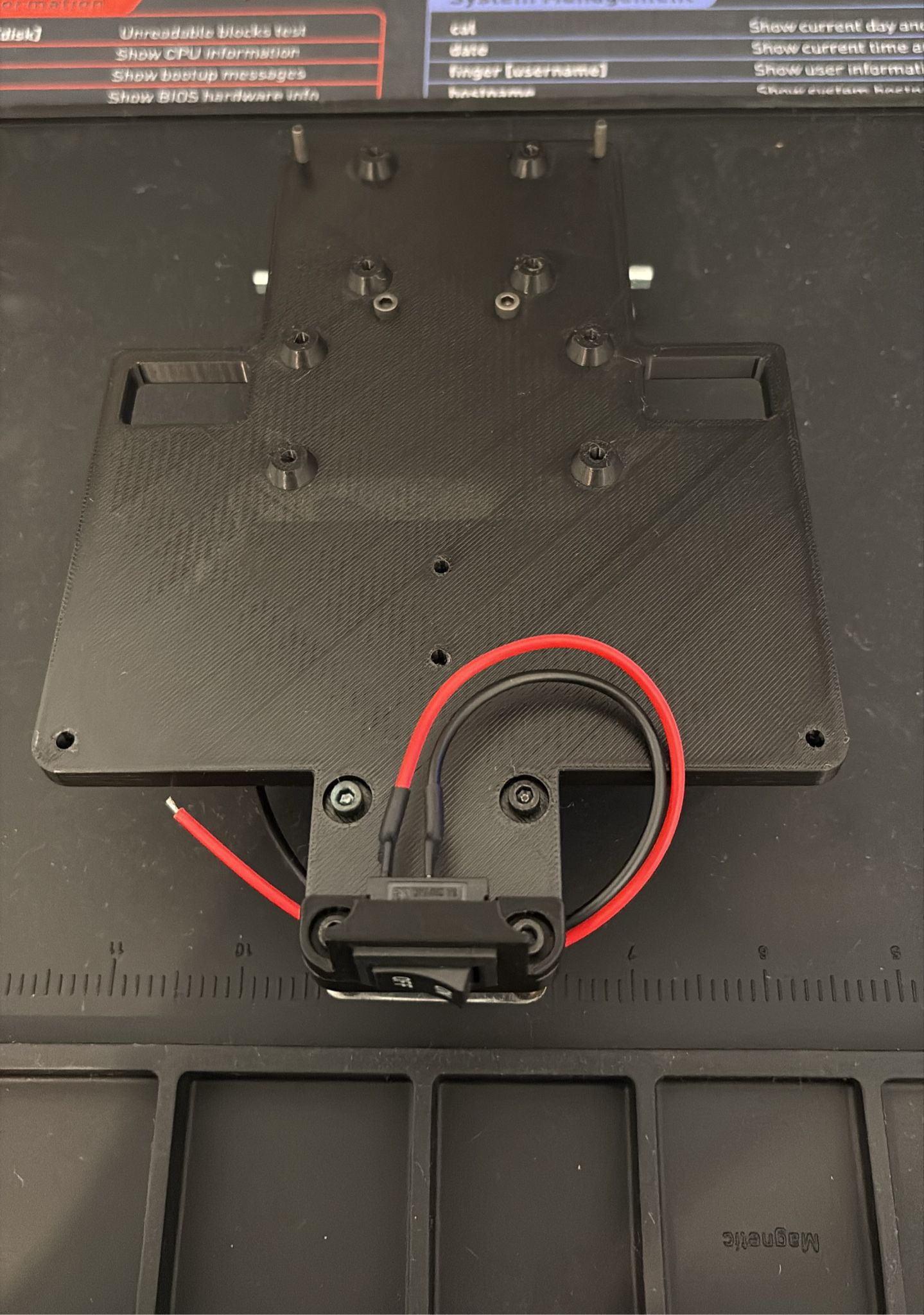
| 锂电池或18650电池组 | 1 | — | 为机器人供电 |
| 橡胶轮(适配电机轴) | 2 | — | 驱动轮 |
| 万向轮 | 1 | — | 支撑轮 |
| 杜邦线/排针 | 若干 | — | 接线用 |
| ESP32-CAM模块 | 1 | — | 摄像头扩展 |
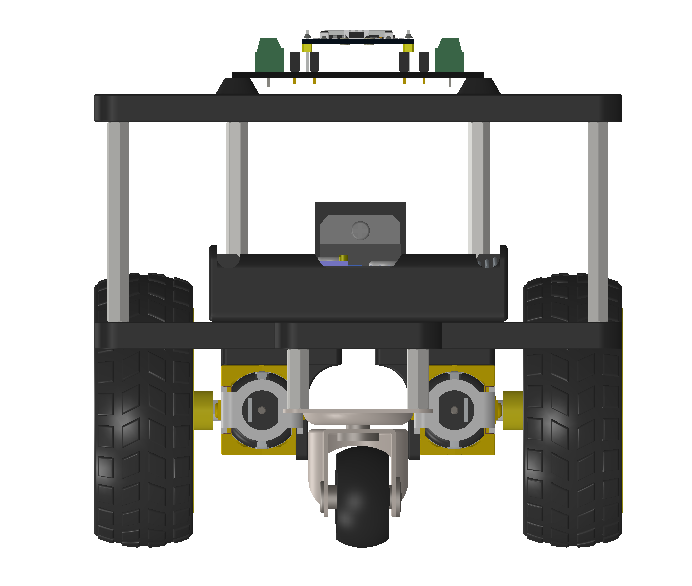
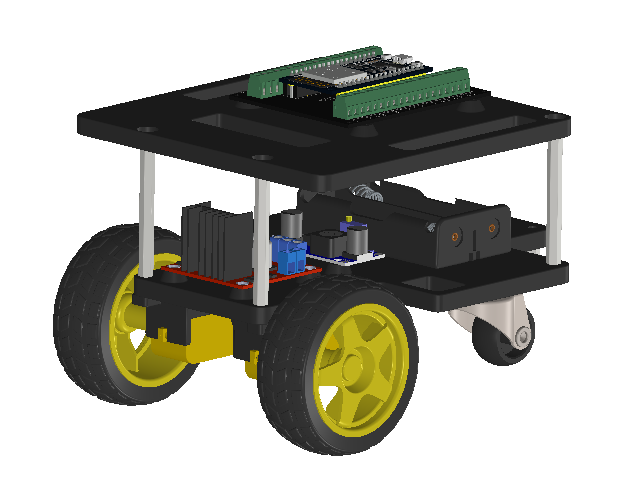
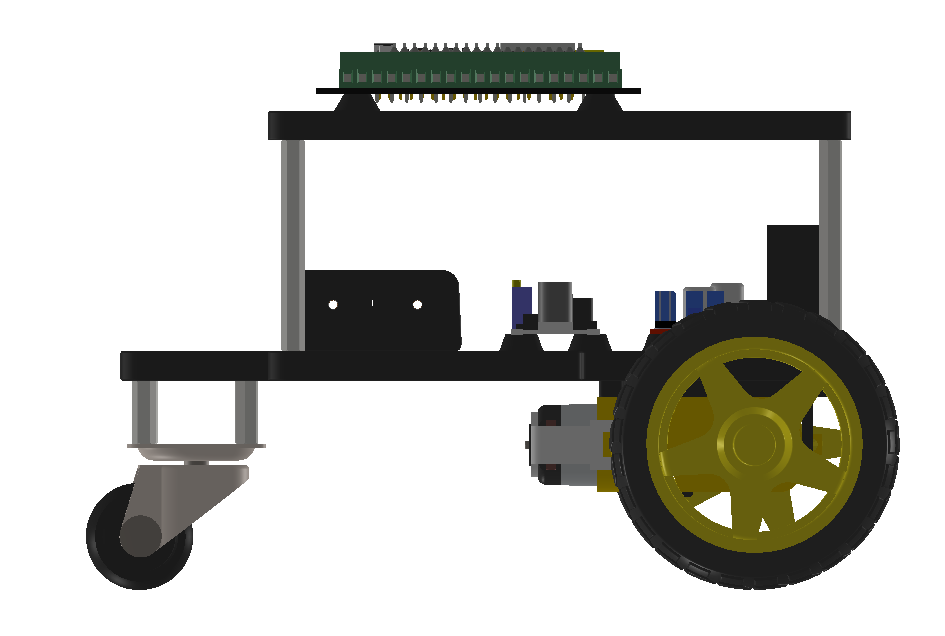
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
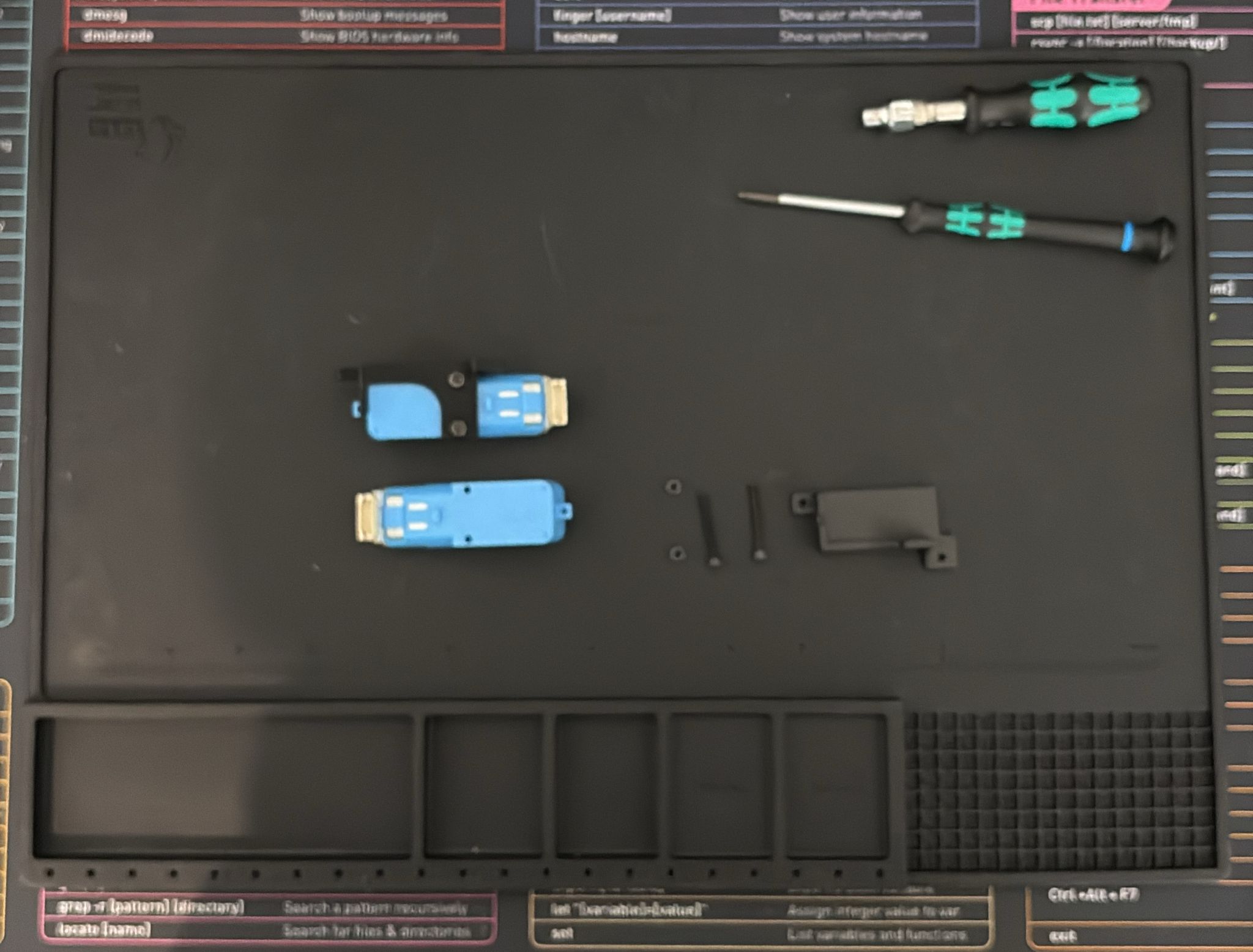
项目图库



所需技能
🔧 **动手能力**:需要组装3D打印零件、焊接电子元件、接线和调试硬件
💻 **编程能力**:需要了解ROS2基本概念、命令行操作,以及PlatformIO固件烧录
⚡ **电子电路**:需要理解电机驱动、编码器、IMU等传感器接线和基本电路知识
适用场景
**ROS2学习入门**:为初学者提供从零开始的完整ROS2实践体验
**机器人教育**:适合高校或培训机构作为机器人课程的教学平台
**开源机器人开发**:作为基础平台进行二次开发,添加传感器或功能模块
**低成本原型验证**:快速搭建机器人原型,验证算法和控制逻辑
**远程实验**:通过仿真模式,无需硬件即可学习ROS2机器人编程