HeRoSwarmV2 全功能集群机器人
heroswarmv2
ROS
4/5
🧩 软硬件结合
已发布

项目简介
heroswarmv2 开源代码与硬件设计,来自 He 实验室。
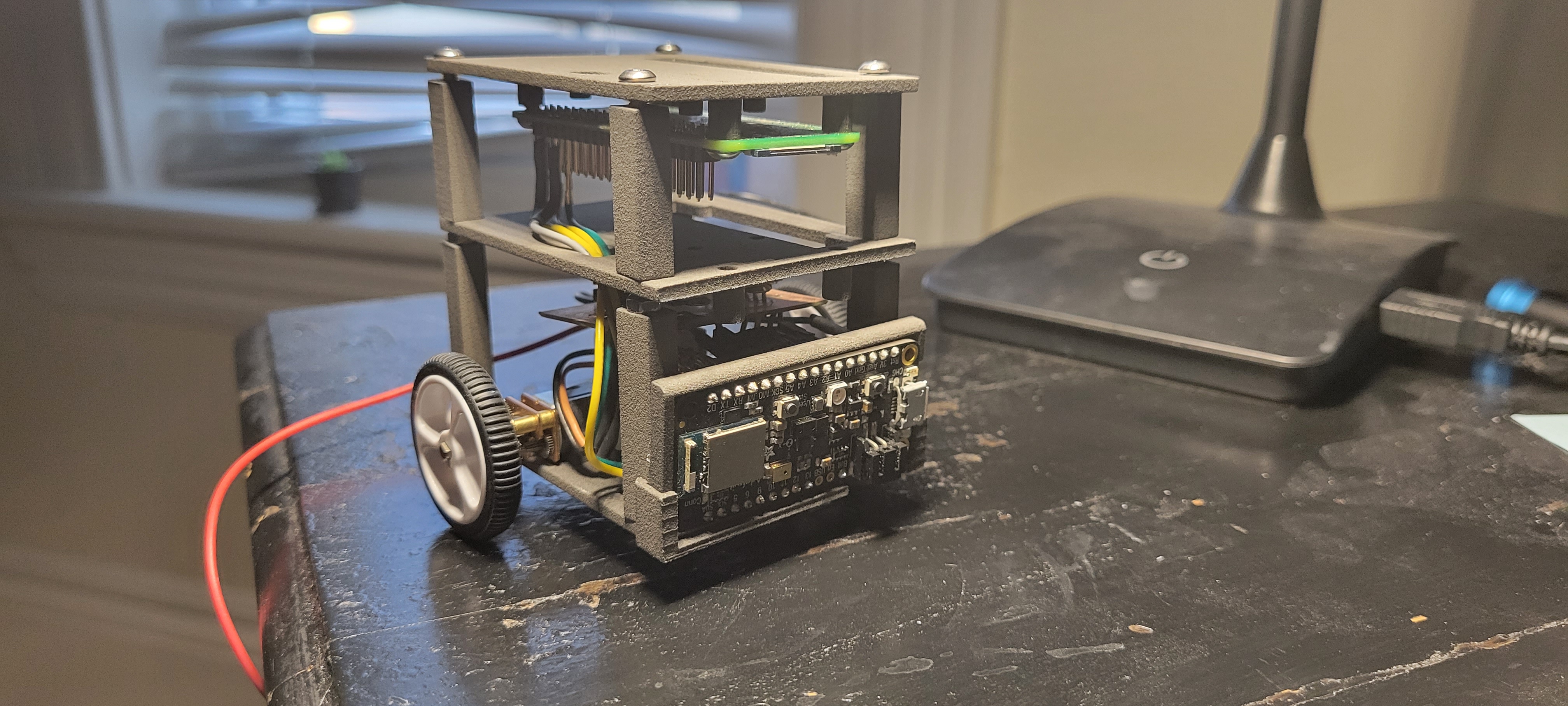
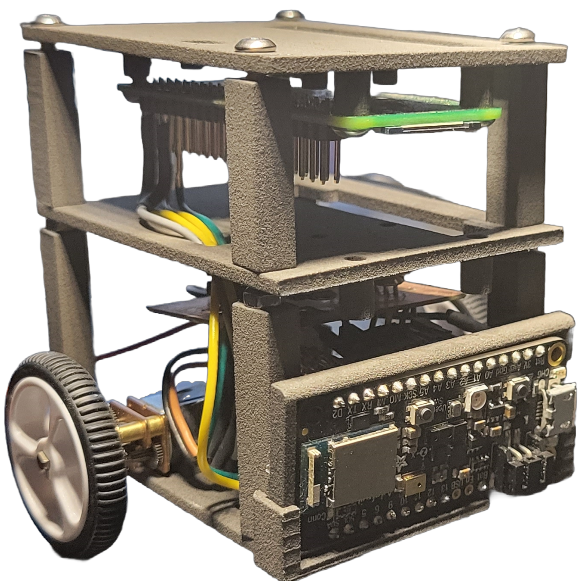
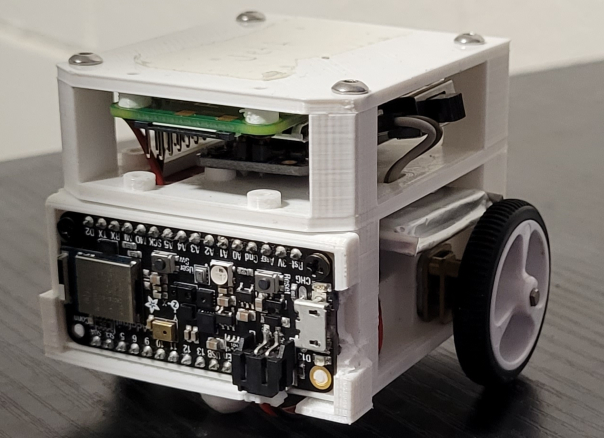
该仓库包含佐治亚大学异构机器人研究实验室(HeRoLab)设计的群体机器人(heroswarmv2)的开源代码和硬件设计。
标签
项目特点
**完全开源**:硬件设计文件和软件代码均开放,便于复现和修改。
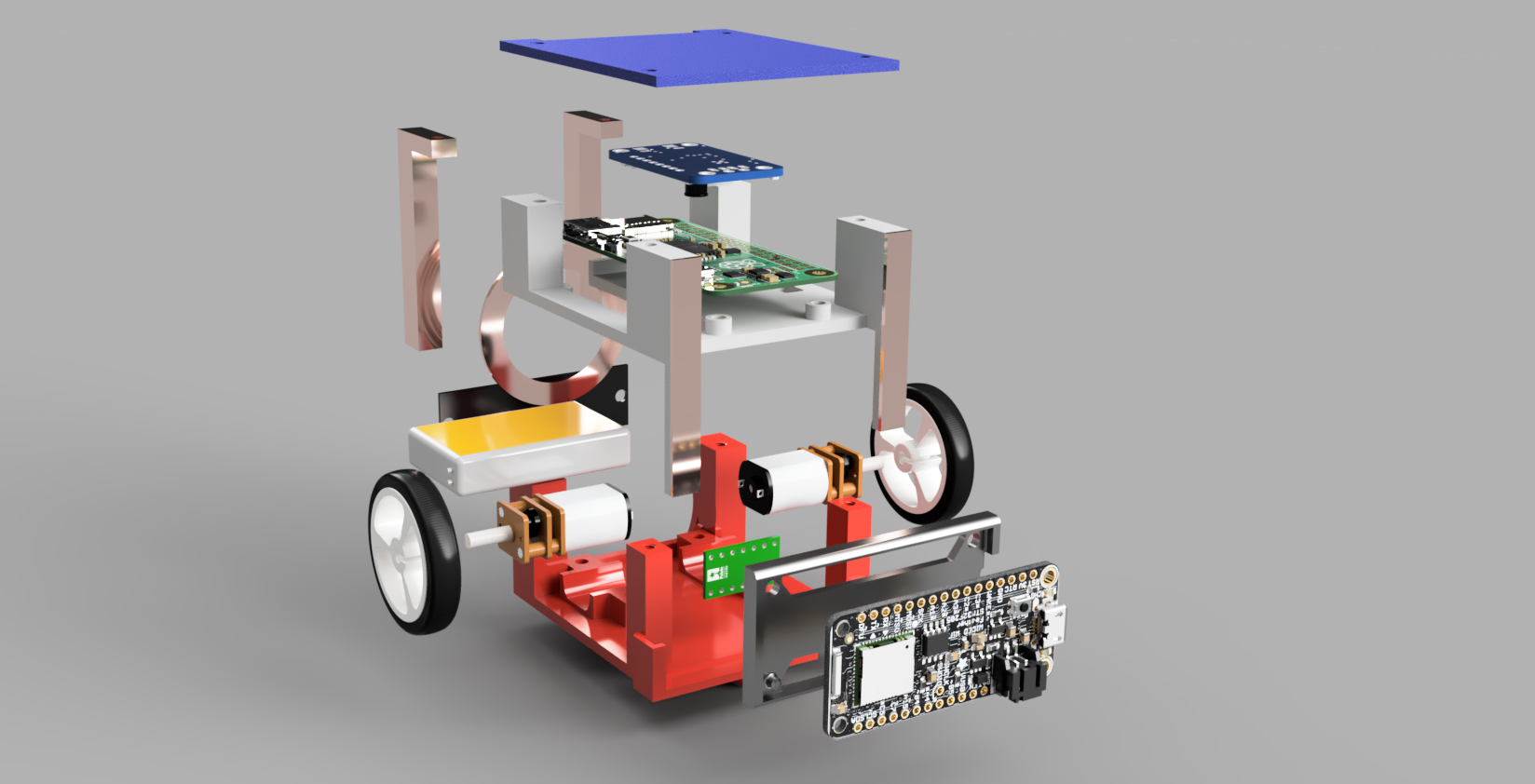
**全功能集成**:在一个微型平台上集成了感知、通信、计算、运动和电源管理五大能力。
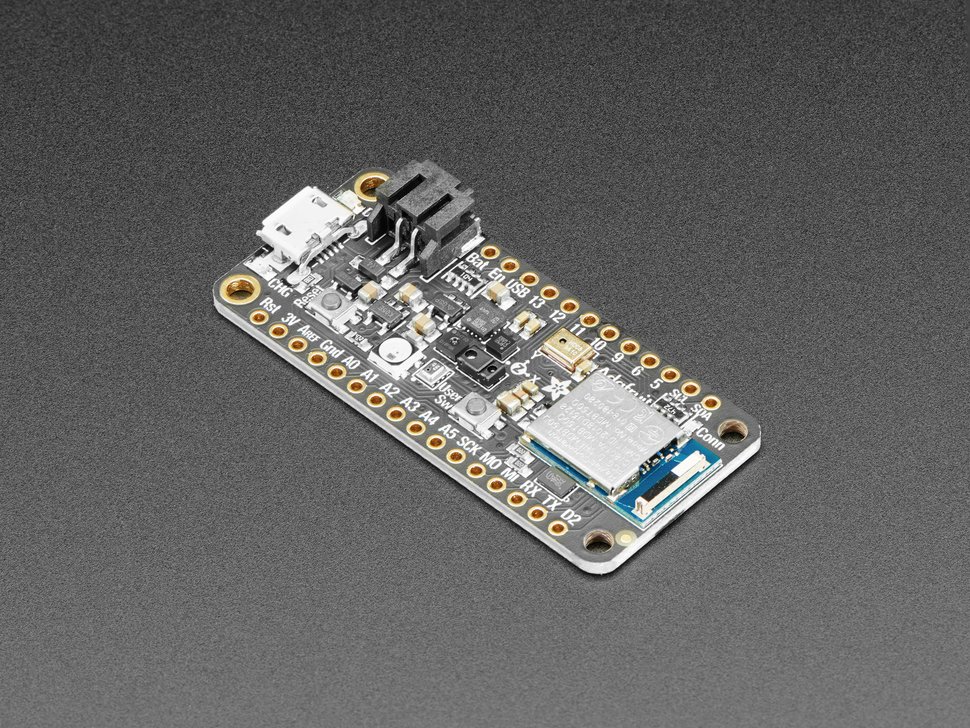
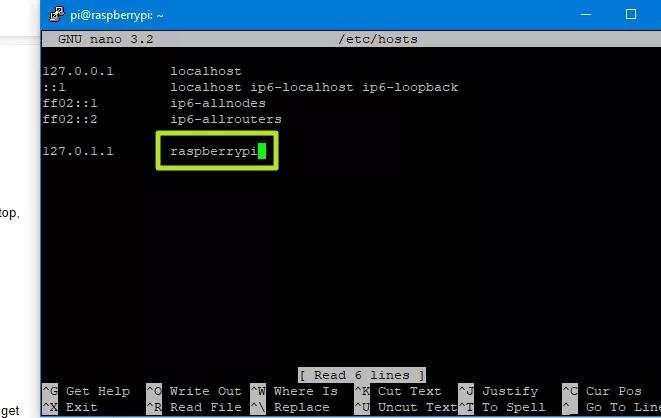
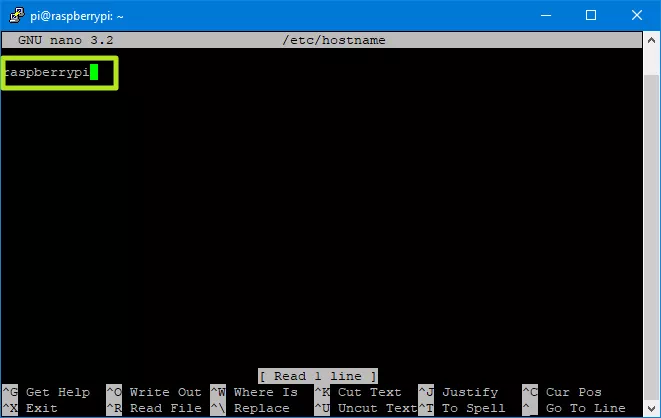
**ROS 支持**:基于 Raspberry Pi Zero 的计算模块可运行 ROS,便于集成现有机器人软件生态。
**多种充电方式**:支持感应式无线充电和磁耦合充电,适应不同实验场景。
**模块化设计**:硬件和软件分层设计,便于扩展和定制。
**学术验证**:相关论文已发表在 IEEE/SICE SII 2023 会议,并有多个演示视频。
技术规格
| 尺寸 | 微型(具体尺寸见硬件设计文件) |
|---|---|
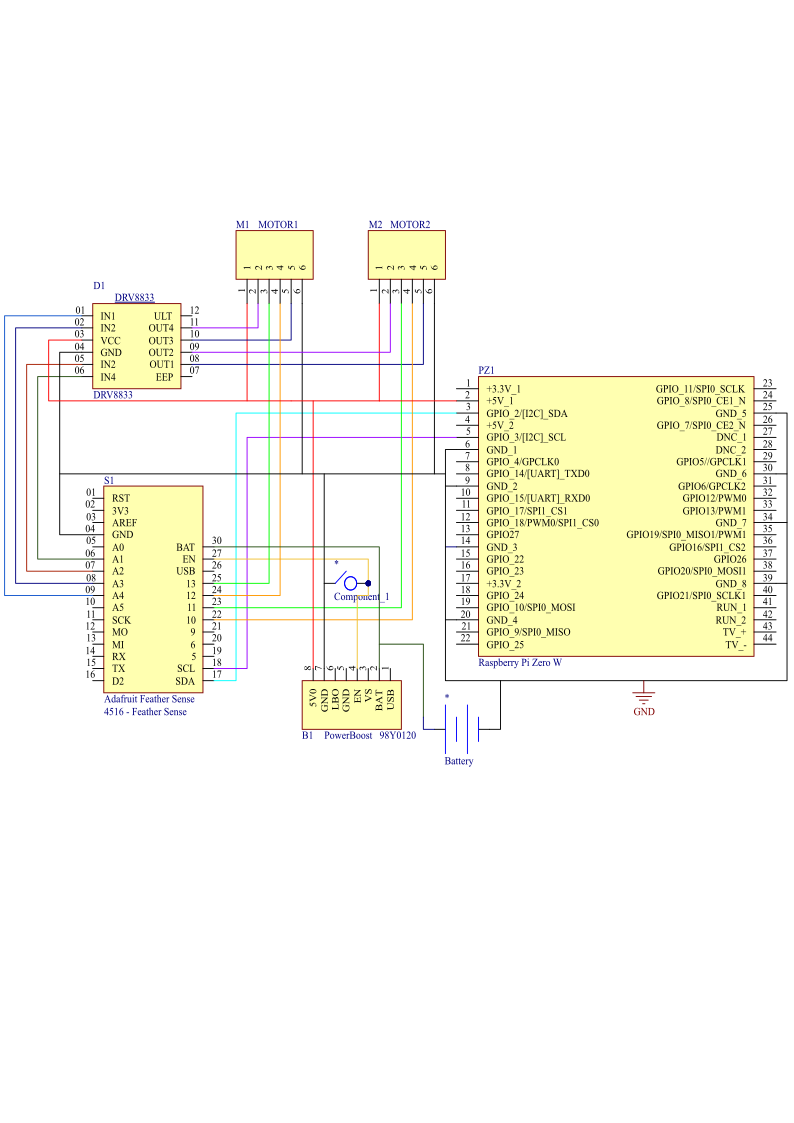
| 主控制器 | Raspberry Pi Zero(计算模块) + 微控制器(电机控制) |
| 传感器 | 接近传感器、RGB 传感器、声音传感器、IMU(惯性测量单元)、高度计、湿度/气压传感器 |
| 通信 | Wi-Fi、蓝牙 |
| 运动 | 多级电机控制,带轮式里程计 |
| 电源 | 专用电源管理,支持感应式无线充电或磁耦合充电 |
| 软件 | ROS 支持,高级编程接口 |
| 计算等级 | C1 级(Trenkwalder 2019 定义) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Raspberry Pi Zero | 1 | — | 核心计算单元 |
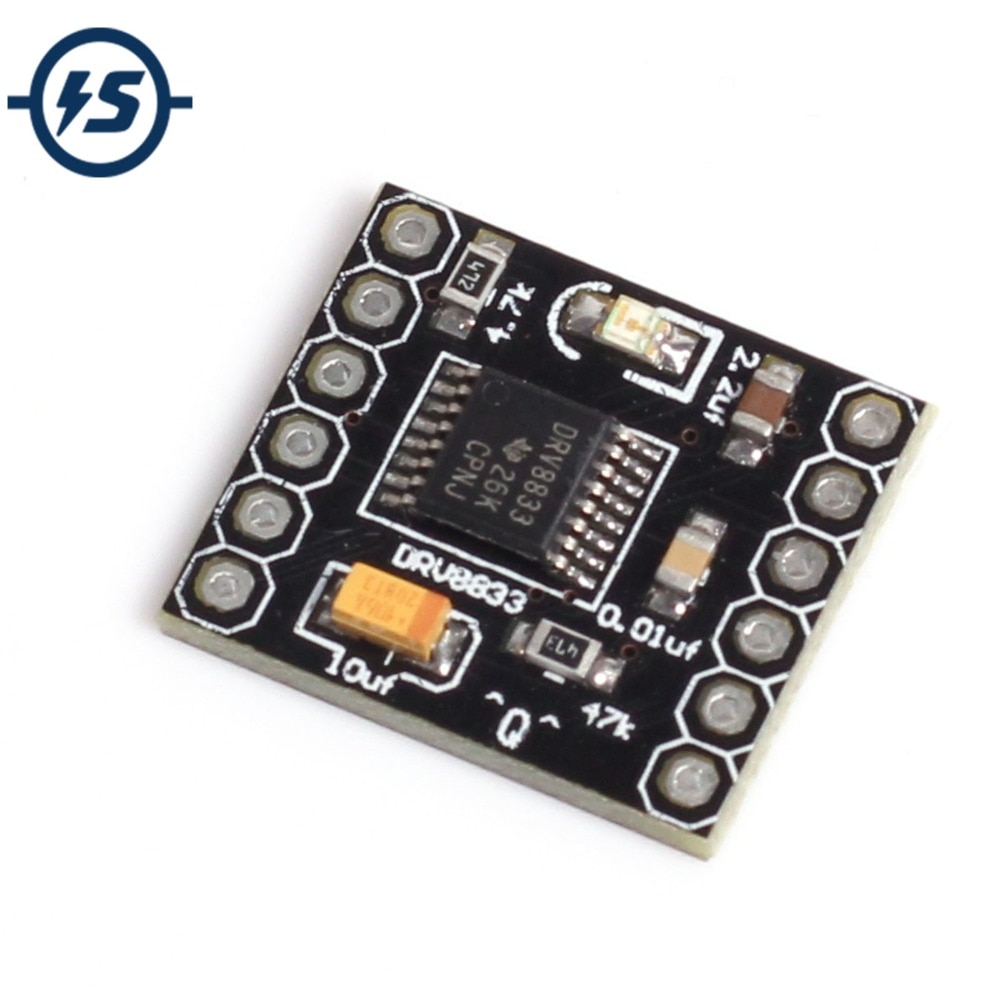
| 待确认(如 STM32 系列) | 1 | — | 电机控制 |
| 接近传感器 | 若干 | — | 具体型号见设计文件 |
| RGB 传感器 | 1 | — | |
| 声音传感器 | 1 | — | |
| IMU 模块 | 1 | — | |
| 高度计 | 1 | — | |
| 湿度/气压传感器 | 1 | — | |
| Wi-Fi/蓝牙模块 | 1 | — | 集成在 Pi Zero 上 |
| 直流电机 | 2 | — | 驱动轮子 |
| 锂电池 | 1 | — | 具体规格见设计文件 |
| 无线充电线圈/磁耦合模块 | 1 | — | |
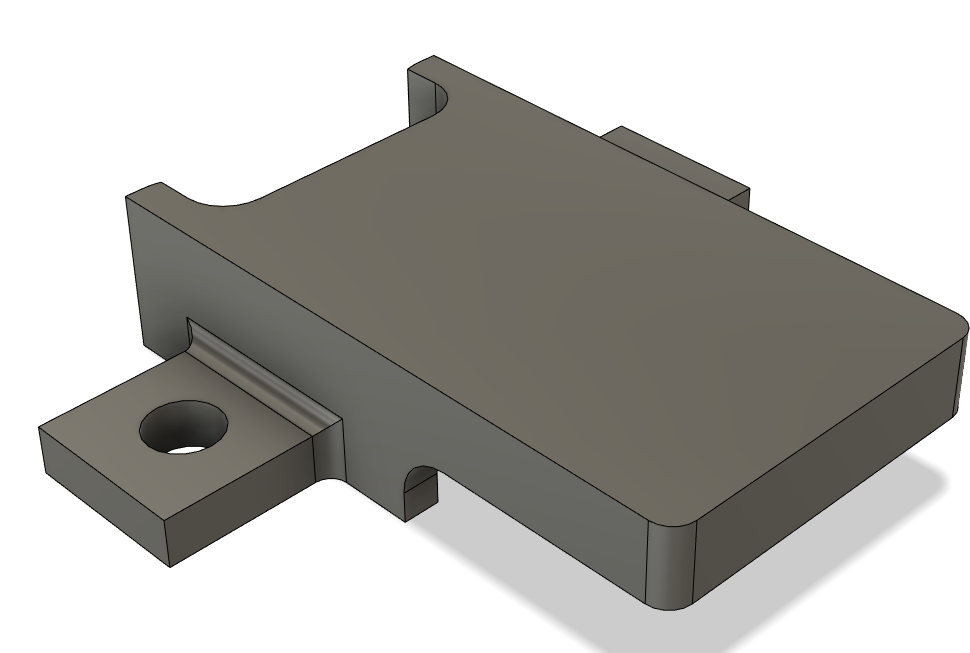
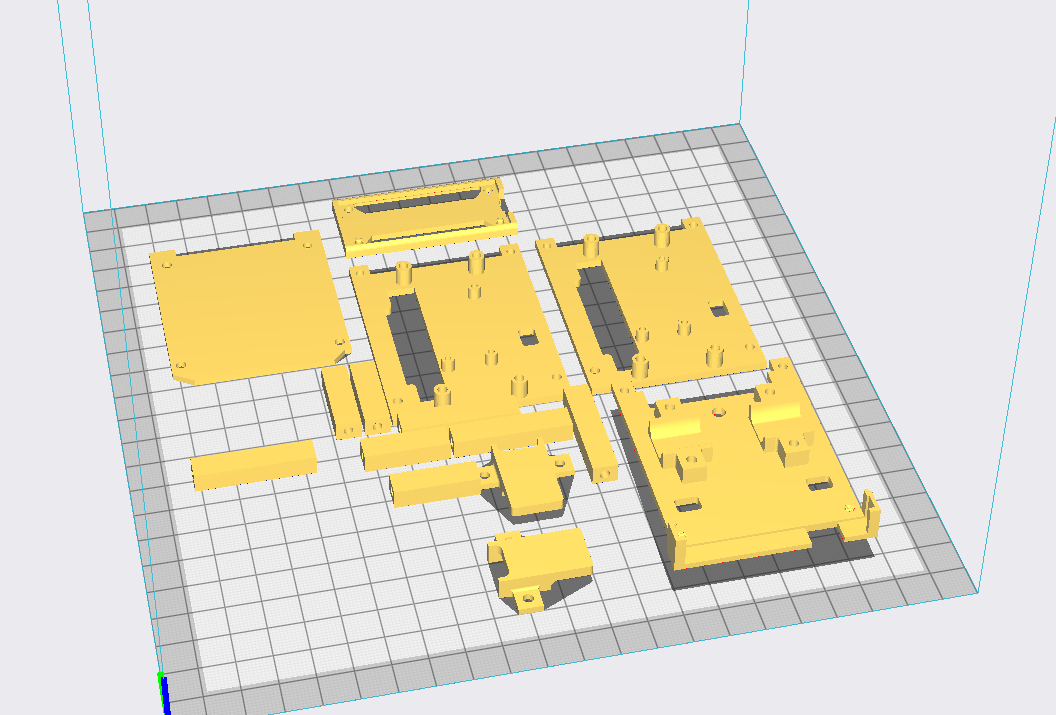
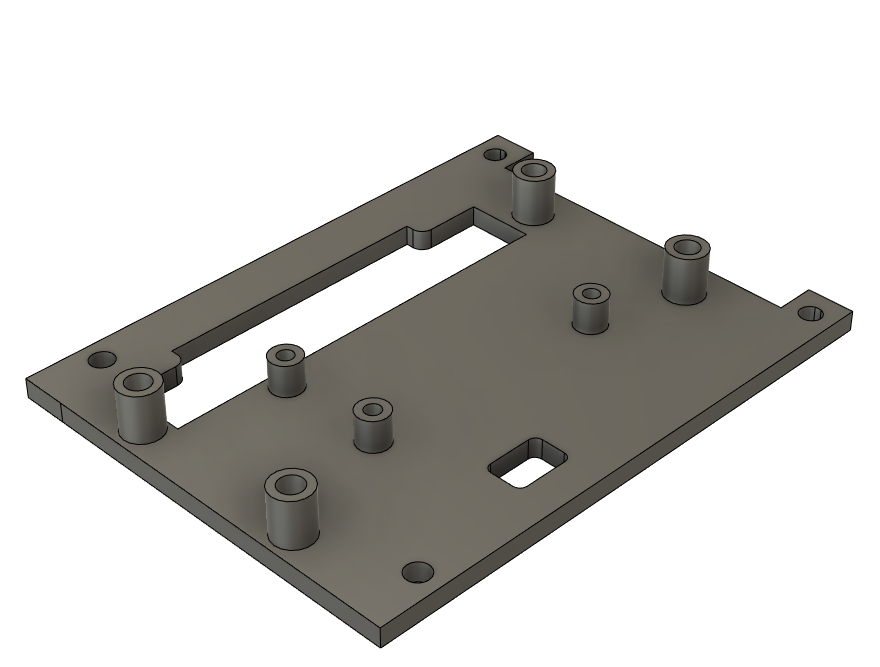
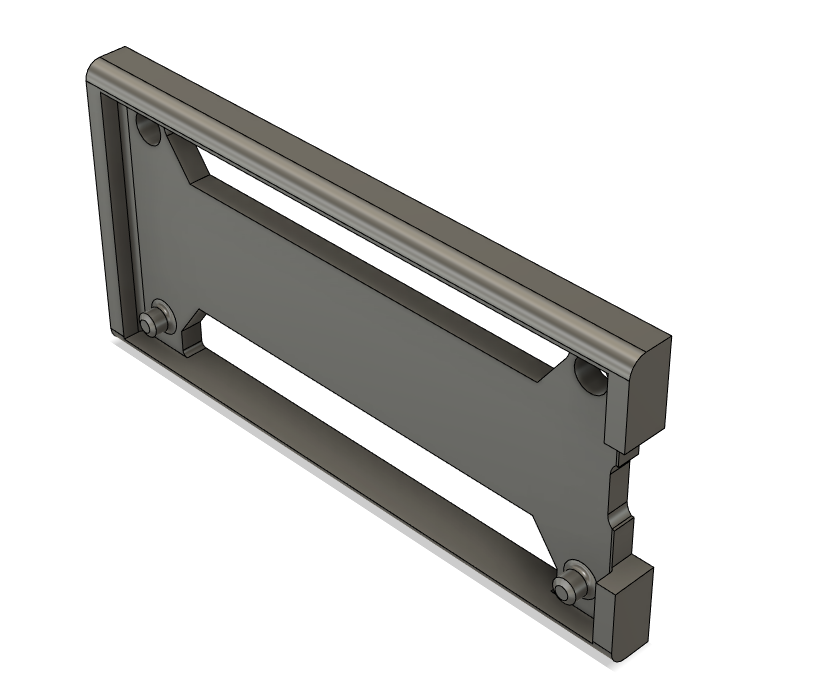
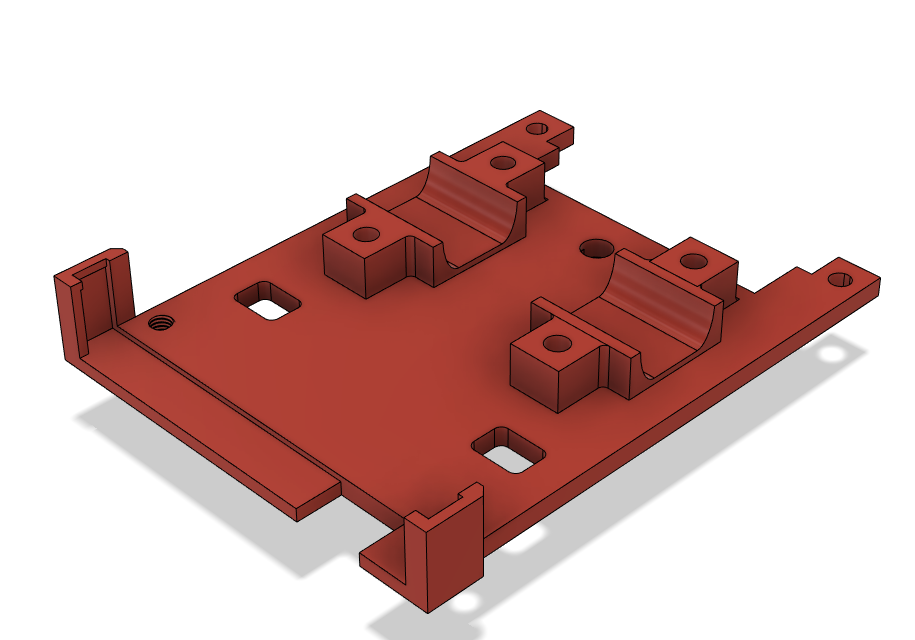
| 3D 打印外壳 | 1套 | — | 见 STL 文件 |
| 轮子、螺丝、连接线等 | 若干 | — |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库





所需技能
🔧 **动手能力**:需要焊接、组装和调试硬件电路,3D 打印外壳。
💻 **编程能力**:需要掌握 Python/C++,熟悉 ROS 框架,能够编写多机器人控制算法。
⚡ **电子电路**:需要理解微控制器、传感器接口、电机驱动和电源管理电路。
适用场景
多机器人集群算法研究与验证(如 rendezvous、formation、coverage、pursuit-evasion)
机器人学课程教学实验
分布式感知与通信系统原型开发
低成本、可扩展的机器人平台搭建