搜索 "bot" 找到 388 个结果
WIP: ESP32驱动的四足机器狗,代码在此,硬件在其它仓库。
TNY-360机器人源码和3D模型。
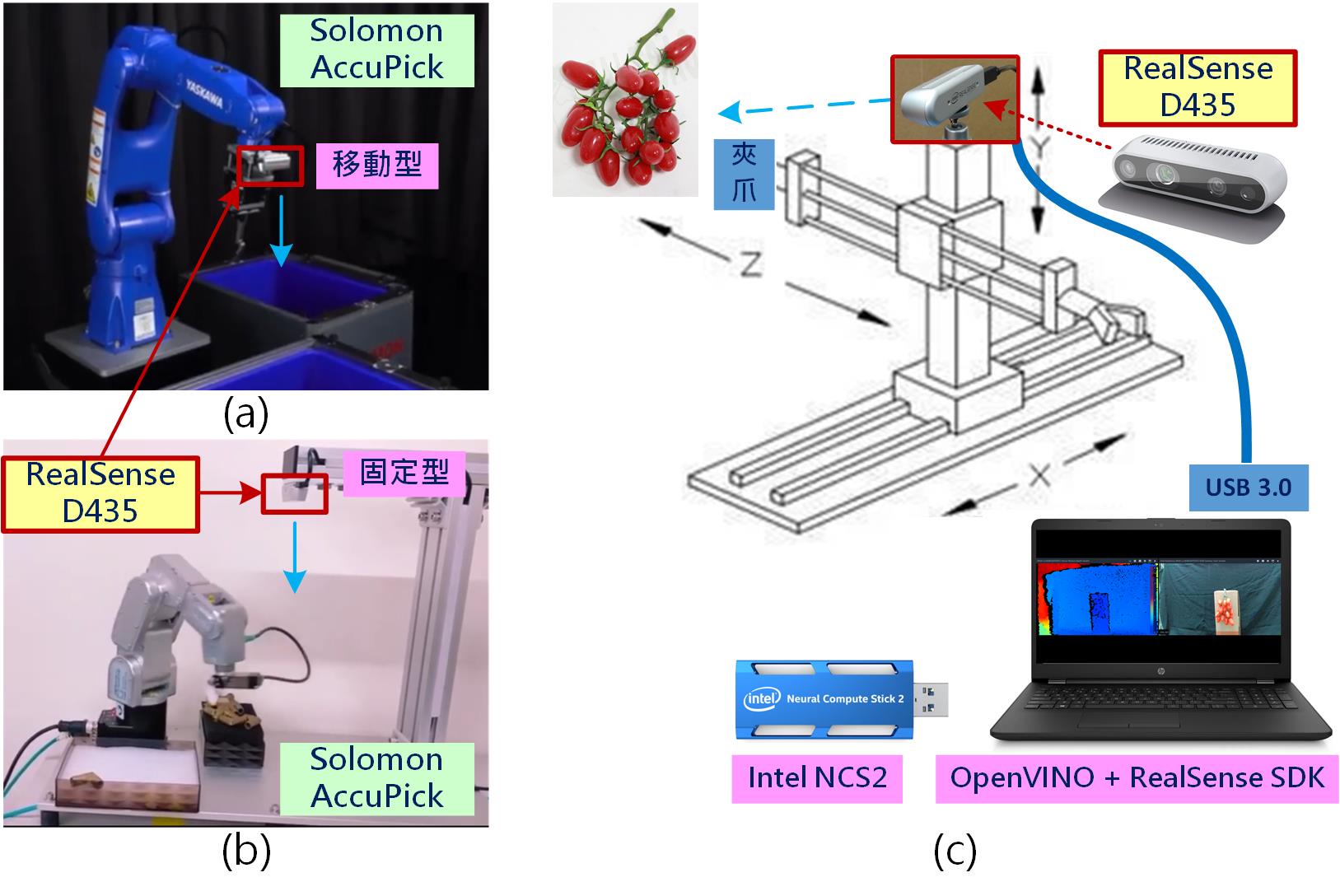
土炮智能機器手視覺系統,結合Intel OpenVINO NCS, RealSense D435完成採收小蕃茄直交式機器手臂視覺系統概念機。
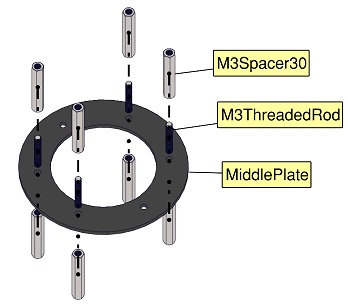
A set of six axis gripper robotic arm based on DM actuator.
Open Roberta Lab让青少年编程机器人。
A minimal quadrotor autonomy framework in Rust (Mac, Linux, Windows)
A 3D Printed Quadrupedal Robot for Locomotion Research. :turtle:
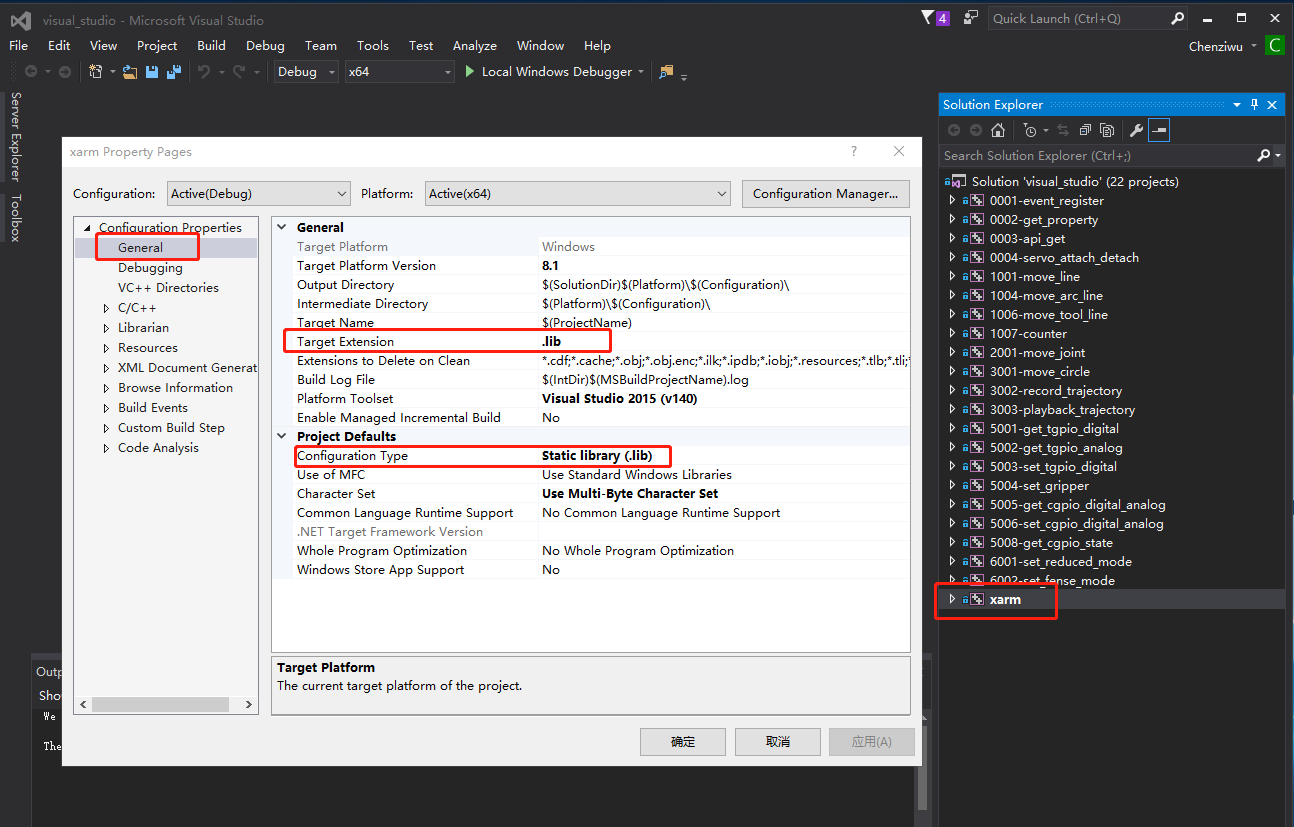
C++ SDK for UFACTORY robots, 850, xArm5/6/7, and Lite6.
Affordable (< 100$), light-weight (< 200 gr), adaptive, underactuated robot hands
⚙️ Generate RC servo signal on a selected pins with ESP32 device and Arduino framework.
使用NodeMUC-32S(ESP32)和MicroPython的蜘蛛四足机器人。
This stack contains hardware drivers, Gazebo plugins and other basic functionalities for the Neuronics Katana family of
Base Mujoco Gymnasium environment for easily controlling any robot arm with operational space control. Built with dm-con
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric Whole-body Controllers
3D打印平行夹爪,兼容Feetech STS3215和Waveshare ST3215舵机,适配S。
A Full-Stack Robotics Development Environment
开源3D打印机器人执行器。
Humanoid walking controller with various baseline methods
Lightweight interface for controlling ROS-based robotic arms using LeRobot
This repository shows how to classify EMG data coming from Myo Armband using neural networks and interface a 3d printed