SO-ARM100/101 平行夹爪
SO-ARM100-101-Parallel-Gripper
嵌入式
3/5
🧩 软硬件结合
已发布

项目简介
3D打印平行夹爪,兼容Feetech STS3215和Waveshare ST3215舵机,适配S。
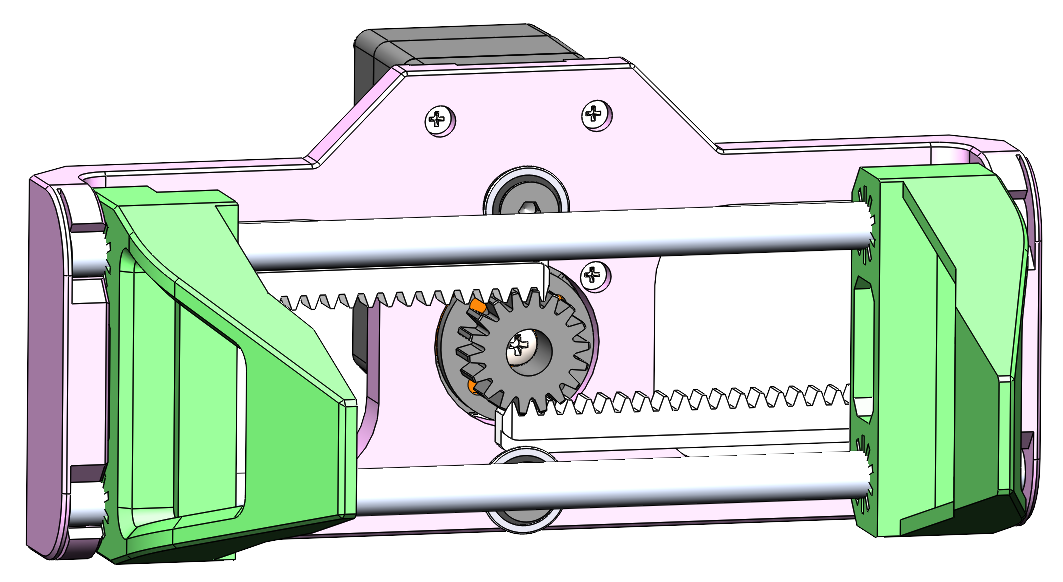
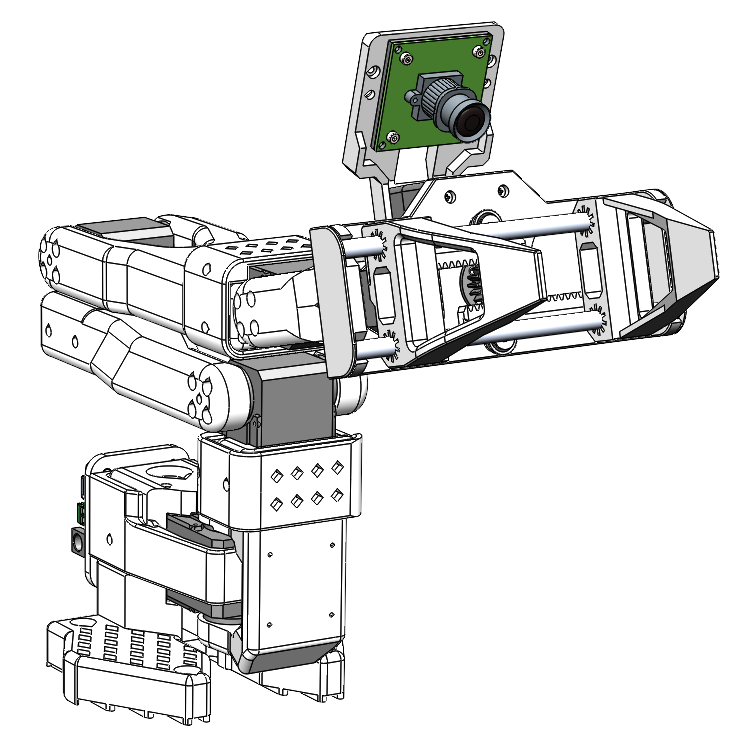
SO-ARM100/101 Parallel Gripper 是一个专为开源机器人平台 SO-ARM100/101 设计的轻量化平行夹爪,由 Robonine 团队开发并完全开源。该项目的核心目标是为机器人爱好者和开发者提供一个低成本、高精度、易于集成的末端执行器解决方案。
标签
项目特点
**高夹持力与精度**:最大120N夹持力,0.5mm重复定位精度,满足多种抓取任务https://raw.githubusercontent.com/roboninecom/SO-ARM100-101-Parallel-Gripper/main/docs/assembly-guide.md)适合快速原型验证。
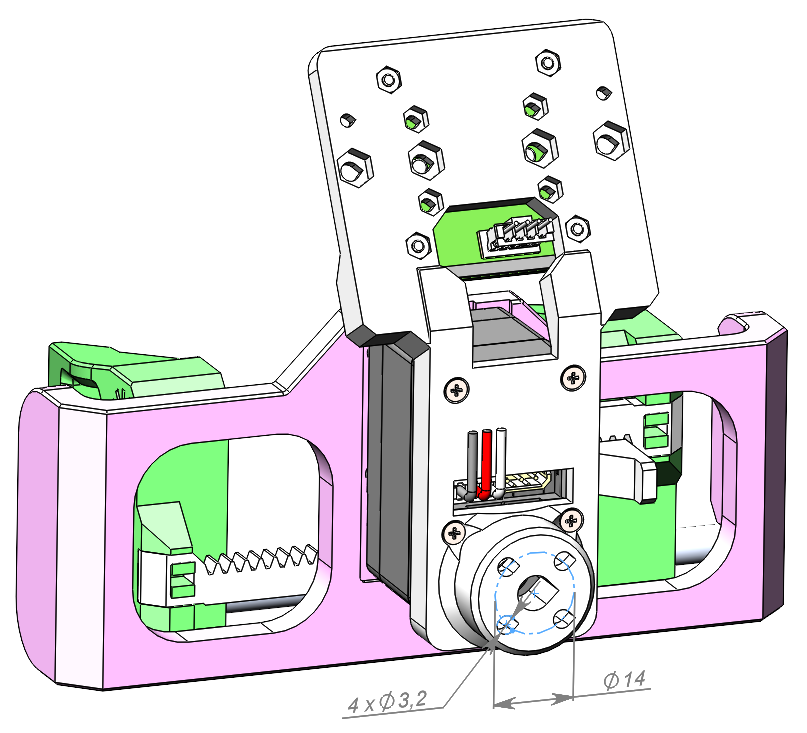
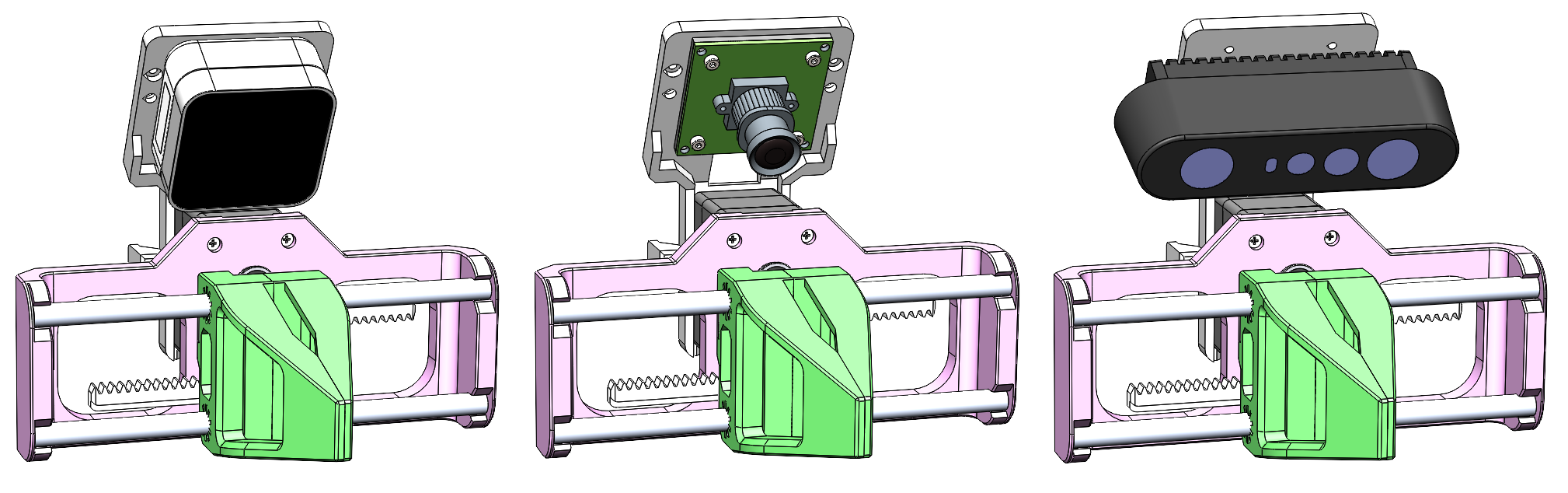
**相机兼容https://raw.githubusercontent.com/roboninecom/SO-ARM100-101-Parallel-Gripper/main/docs/bom.md)bbec、USB摄像头等多种视觉传感器,便于视https://raw.githubusercontent.com/roboninecom/SO-ARM100-101-Parallel-Gripper/main/docs/quick-start.md)用标准FDM打印机打印,材料成本https://raw.githubusercontent.com/roboninecom/SO-ARM100-101-Parallel-Gripper/main/docs/specifications.md)文件和软件均开源。
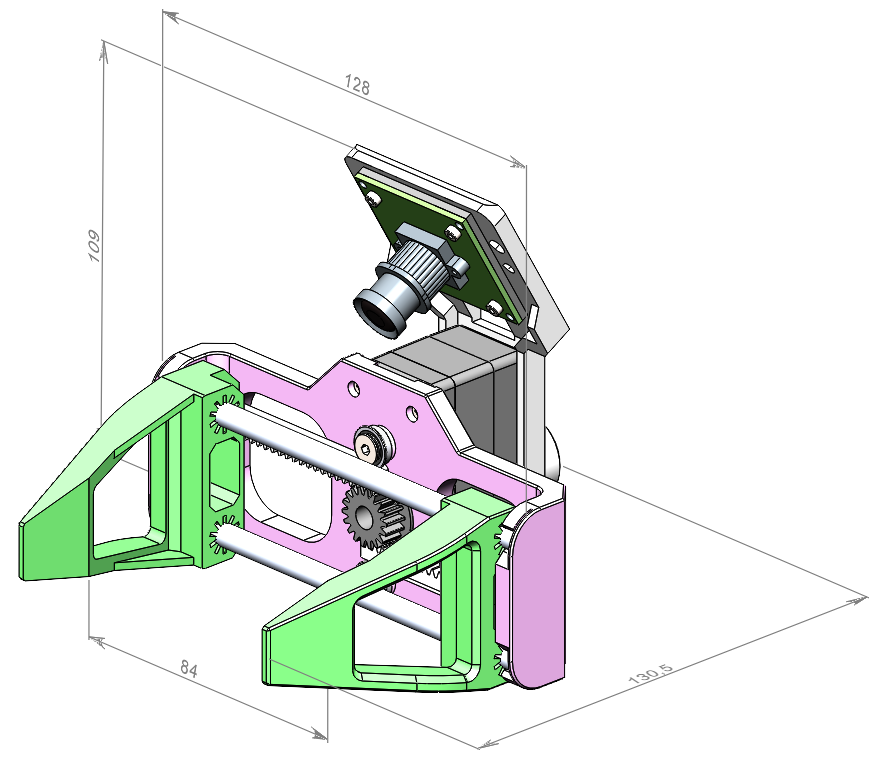
**https://raw.githubusercontent.com/roboninecom/SO-ARM100-101-Parallel-Gripper/main/models/README.md)ebots等主流物理引擎的仿真支持,https://raw.githubusercontent.com/roboninecom/SO-ARM100-101-Parallel-Gripper/main/simulation/README.md) | |------|------| | 最大夹持力 | 120 N | | 最大夹持速度 | 14 mm/s | | 全行程 | 84 mm | | 重复定位精度 | 0.5 mm | | 组装质量 (PLA, 30%填充) | 170 g | | 自由度 | 1 | | 外形尺寸 (宽×深×高) | 128 × 130.5 × 109 mm | | 舵机型号 | Feetech STS3215 (兼容Waveshare ST3215) | | 舵机工作电压 | 12V | | 舵机堵转扭矩 | 30 kg·cm | | 舵机通信协议 | RS485/TTL (最高1 Mbps) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
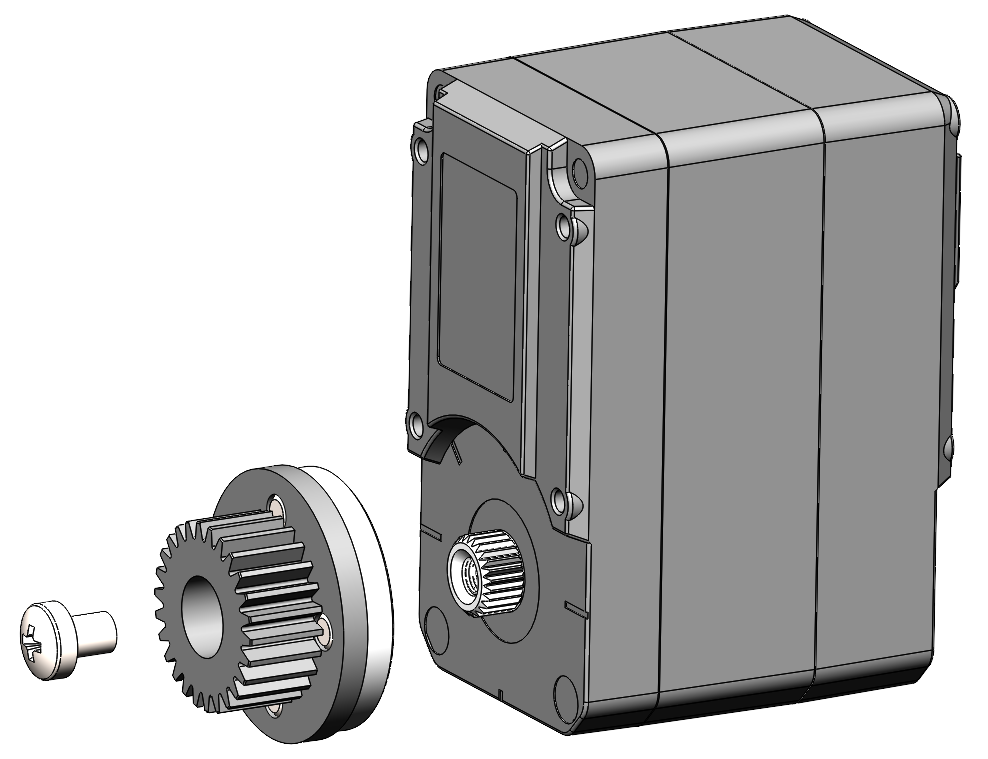
| Feetech STS3215 舵机 | 1 | — | 核心驱动部件 |
| 总线舵机适配板 (Waveshare) | 1 | — | 用于连接舵机和控制器 |
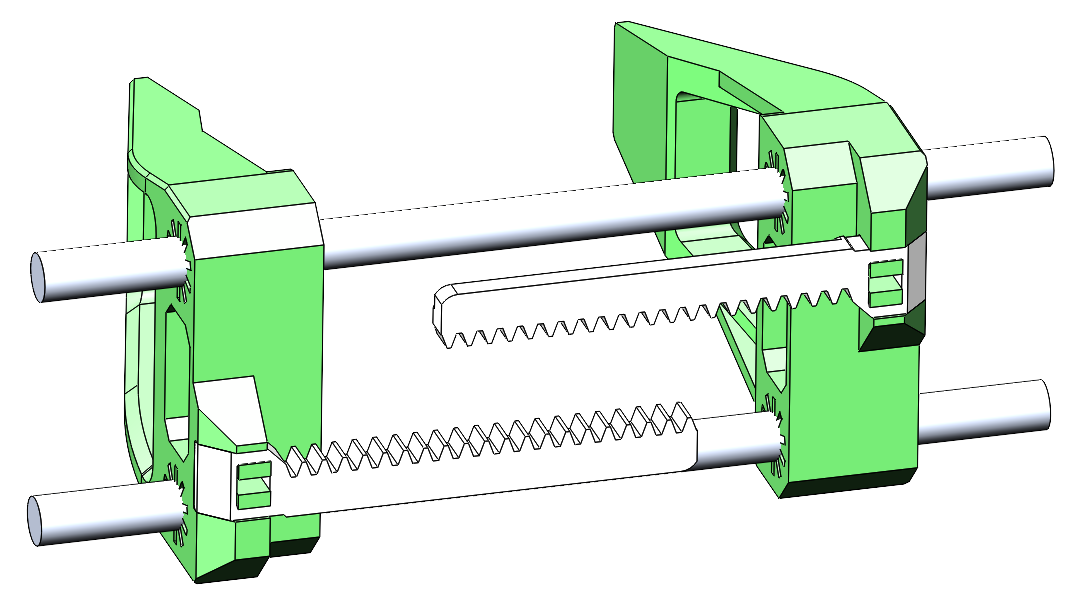
| MF106ZZ 轴承 (6×10×3 mm) | 2 | — | 用于夹爪滑动机构 |
| 铝/碳纤维管 D6x1×125 mm | 2 | — | 用于导向和支撑 |
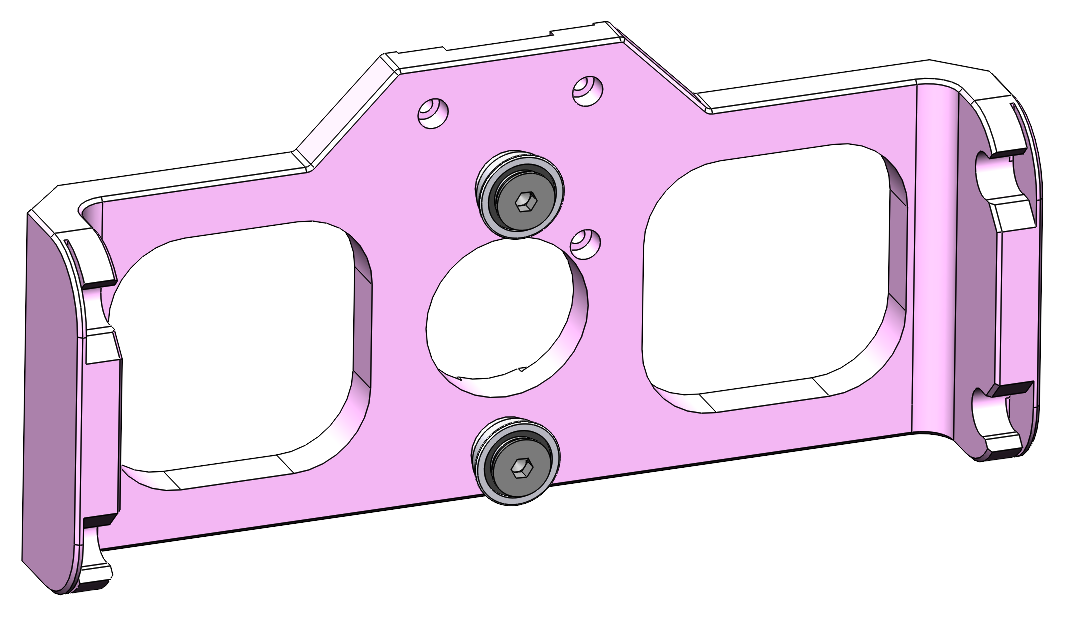
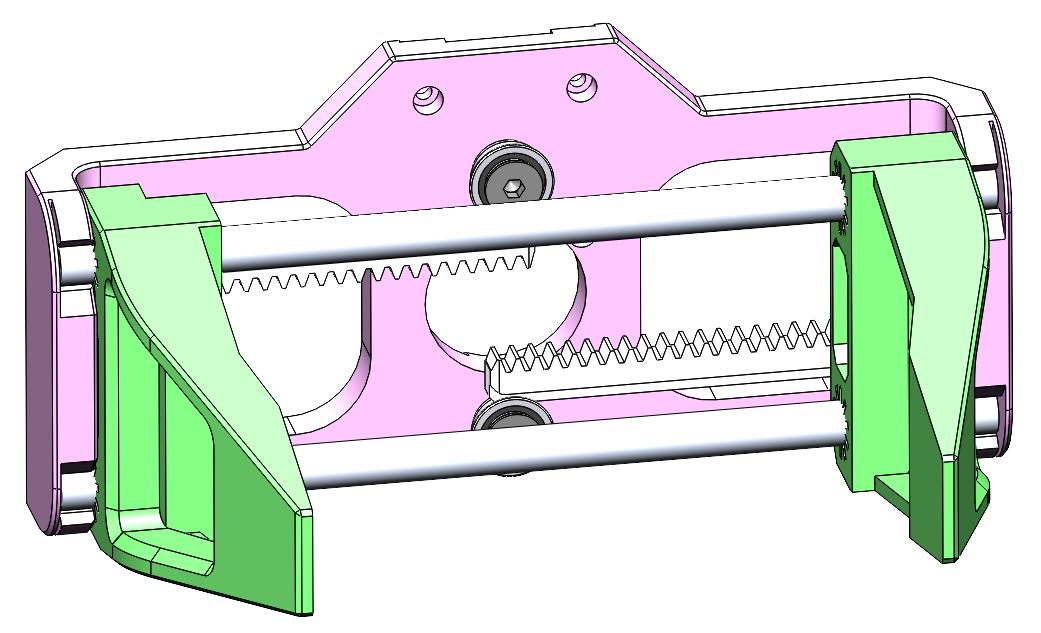
| 主框架 (RB9.01.062.010) | 1 | — | 20%填充 |
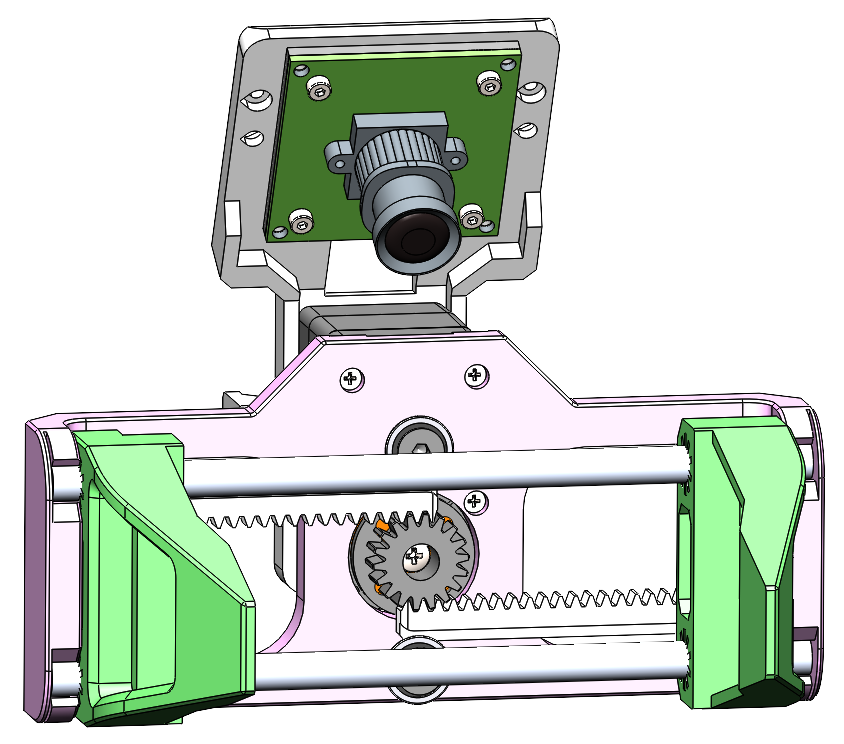
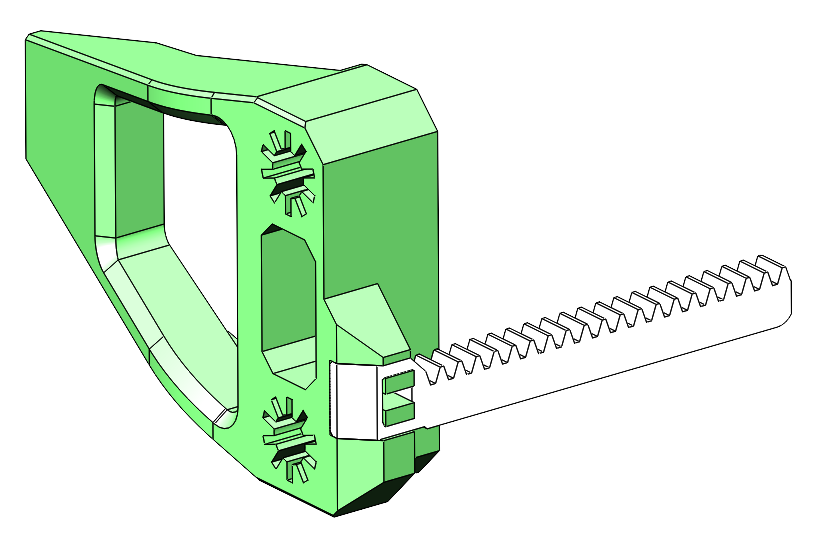
| 夹爪 (RB9.01.062.020) | 2 | — | 20%填充 |
| 齿条 (RB9.01.062.030) | 2 | — | 30%填充 |
| 齿轮 (RB9.01.062.040) | 1 | — | 30%填充 |
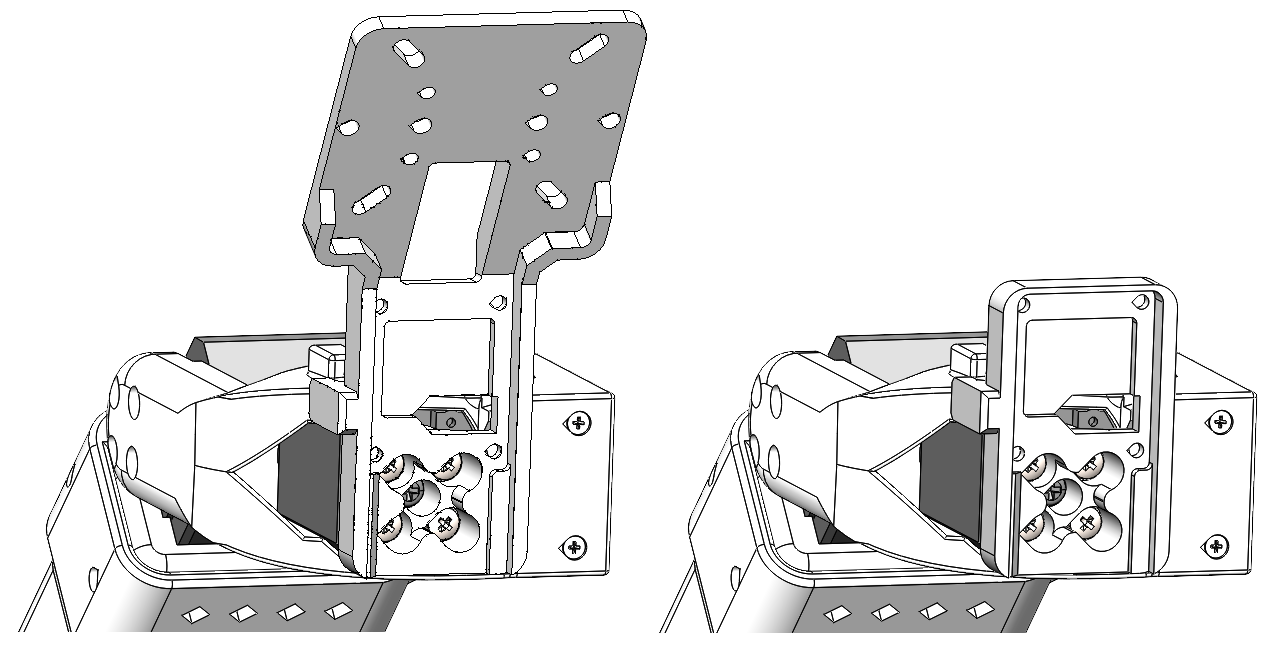
| 相机支架 (RB9.01.060.074) | 1 | — | 20%填充,可选 |
| 支架 (RB9.01.060.080) | 1 | — | 20%填充 |
| 相机垫片 (RB9.01.060.090) | 1 | — | 20%填充,可选 |
| M4×8 DIN 7991 螺丝 | 2 | — | 用于固定舵机 |
| M2×8 DIN 912 螺丝 | 4 | — | 用于固定相机 |
| M2 DIN 934 螺母 | 4 | — | 用于固定相机 |
| M3×4 DIN 913 紧定螺丝 | 4 | — | 用于固定轴承 |
3D 模型
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 2/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 2/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 2/5
⚪ 创造与创新: 3/5
项目图库

所需技能
🔧 **动手能力**:需要基础的机械组装能力,能使用螺丝刀和内六角扳手进行精细操作。
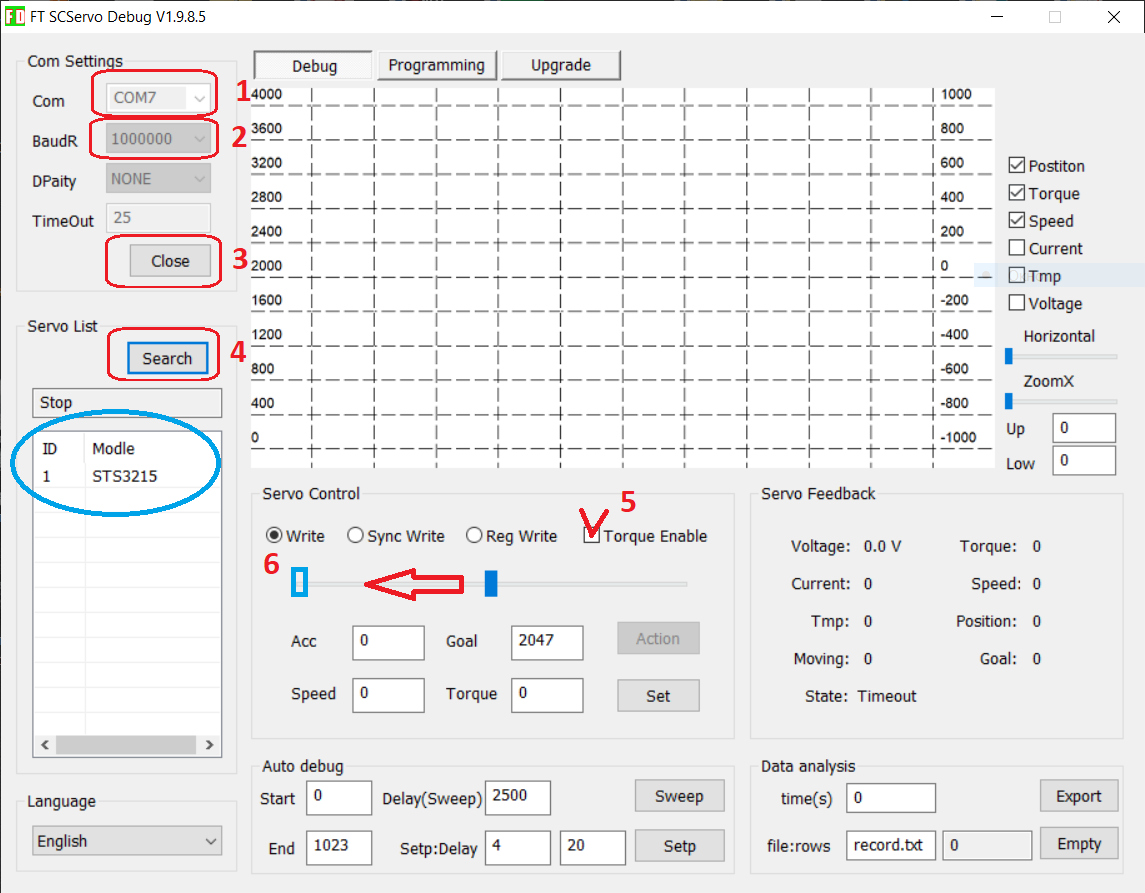
💻 **编程能力**:需要基础的Python编程能力,用于运行控制脚本和配置舵机参数。
⚡ **电子电路**:需要了解舵机的基本接线和通信协议(RS485/TTL),并能连接电源和控制器。
适用场景
**机器人教育与研究**:作为开源机械臂的末端执行器,用于教学演示和算法验证。
**桌面级自动化**:在小型自动化实验台或创客空间中进行轻量级抓取和搬运任务。
**视觉引导抓取**:配合兼容的RGB-D相机,实现基于视觉的物体识别与抓取。
**机器人仿真开发**:在Gazebo、MuJoCo等仿真环境中进行抓取策略的开发和测试。