搜索 "lidar" 找到 29 个结果
OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
LIO-SAM:紧耦合激光雷达惯性里程计,通过平滑与建图实现。
高效鲁棒的LIO包,实现LiDAR-惯性里程计。
LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
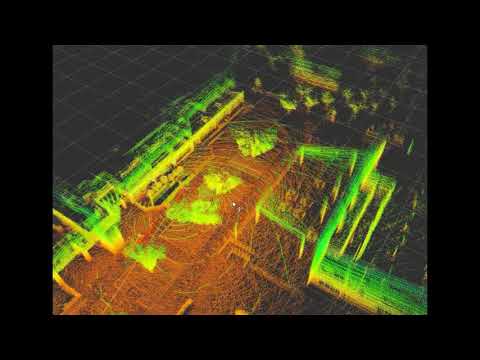
Laser Odometry and Mapping (Loam) is a realtime method for state estimation and mapping using a 3D lidar.
Advanced implementation of LOAM
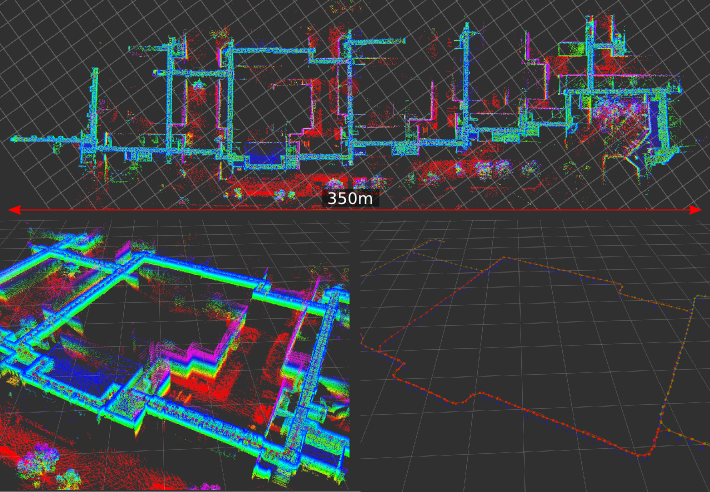
3D LIDAR-based Graph SLAM
[ICRA'23] BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird's-Eye View Representation
An Iterative Closest Point (ICP) library for 2D and 3D mapping in Robotics
ROS package to find a rigid-body transformation between a LiDAR and a camera for "LiDAR-Camera Calibration using 3D-3D P
loam code noted in Chinese(loam中文注解版)
An extension of Open3D to address 3D Machine Learning tasks
Real-time 3D localization using a (velodyne) 3D LIDAR
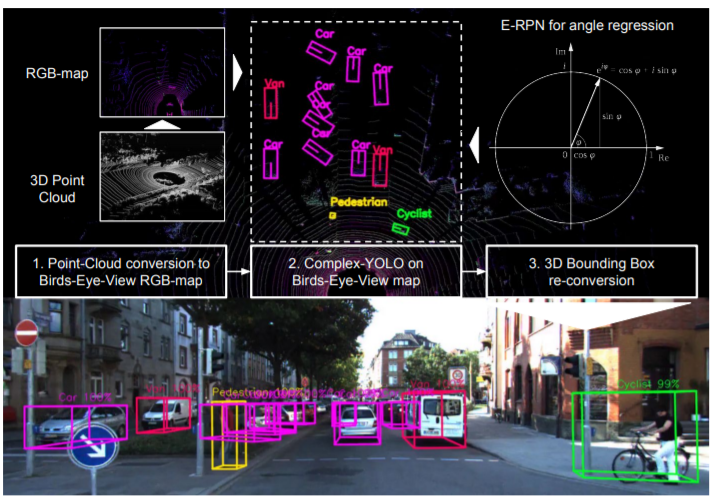
The PyTorch Implementation based on YOLOv4 of the paper: "Complex-YOLO: Real-time 3D Object Detection on Point Clouds"
Interactive Map Correction for 3D Graph SLAM
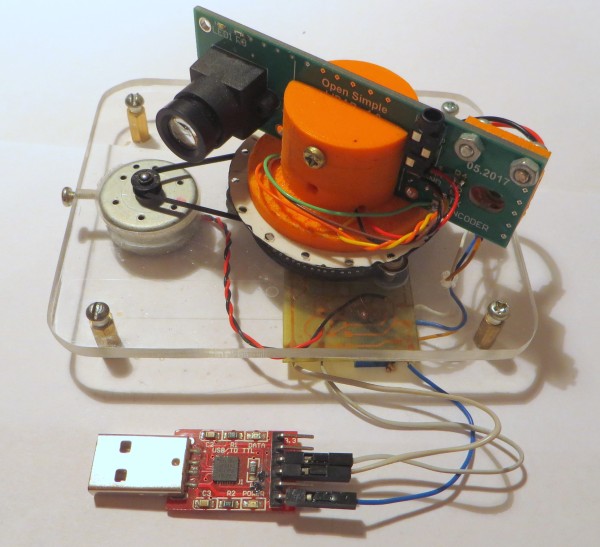
Open Source scanning laser rangefinder
GLIM: versatile and extensible point cloud-based 3D localization and mapping framework
[IEEE ICRA'23] A new lightweight LiDAR-inertial odometry algorithm with a novel coarse-to-fine approach in constructing
[IEEE RA-L & ICRA'22] A lightweight and computationally-efficient frontend LiDAR odometry solution with consistent and a
Semantic and Instance Segmentation of LiDAR point clouds for autonomous driving