OpenSimpleLidar
OpenSimpleLidar
机器人
3/5
🧩 软硬件结合
已发布
项目简介
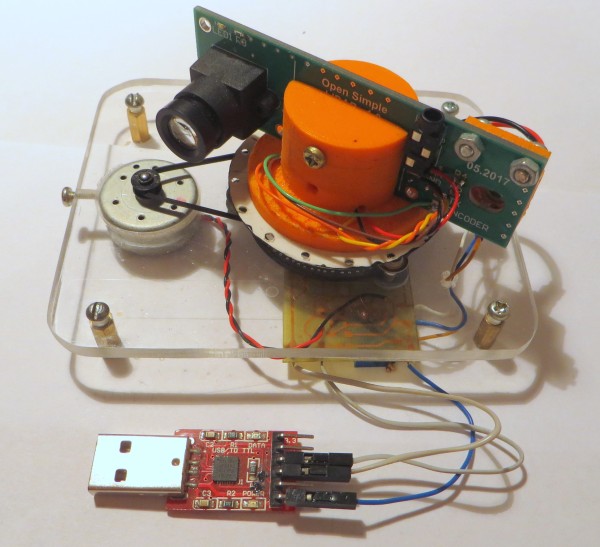
Open Source scanning laser rangefinder
OpenSimpleLidar 是一个开源硬件扫描激光测距仪项目,旨在以极低的成本实现基础的二维环境感知能力。其核心功能是每秒完成5次完整扫描,每次旋转获取180个测量点,角度分辨率达到2度。在测距性能上,最大有效距离为4米,在3米范围内测量精度约为3-5厘米,但精度会受反射表面颜色影响。该项目最突出的特点是极致的低成本——核心组件总价不到30美元,不过需要注意,由于图像传感器TSL1401CL在2023年后价格大幅上涨,实际总成本可能会更高。
标签
项目特点
**低成本**:组件总价低于30美元,是市面上最便宜的DIY激光雷达方案之一。
**开源硬件**:所有设计文件、固件和软件均开源,方便用户修改和定制。
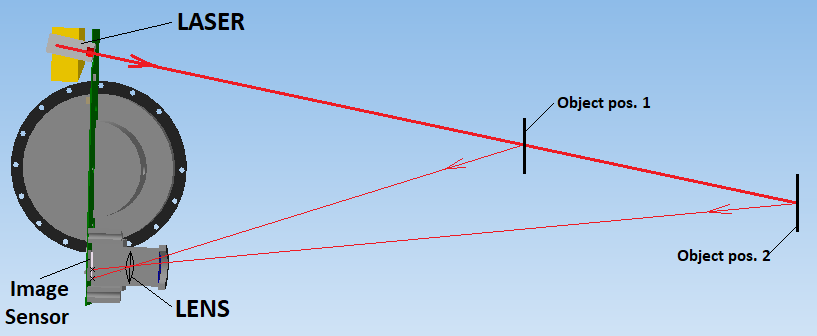
**三角测量法**:采用成熟的三角测距原理,精度和可靠性有保障。
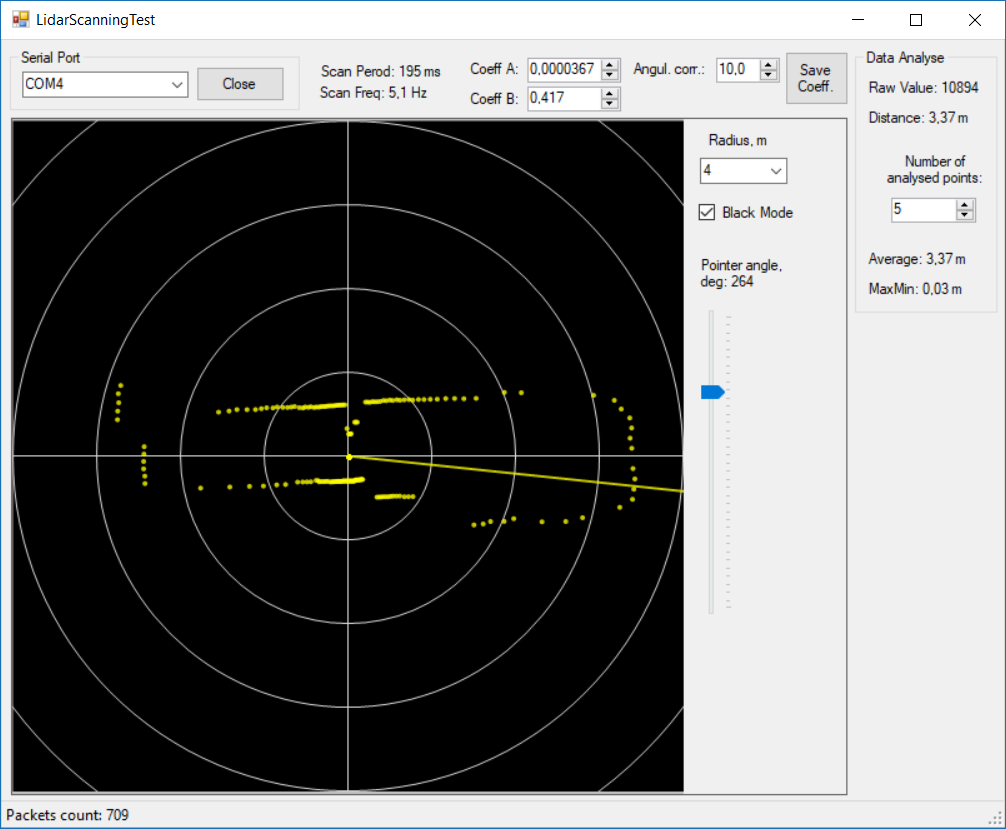
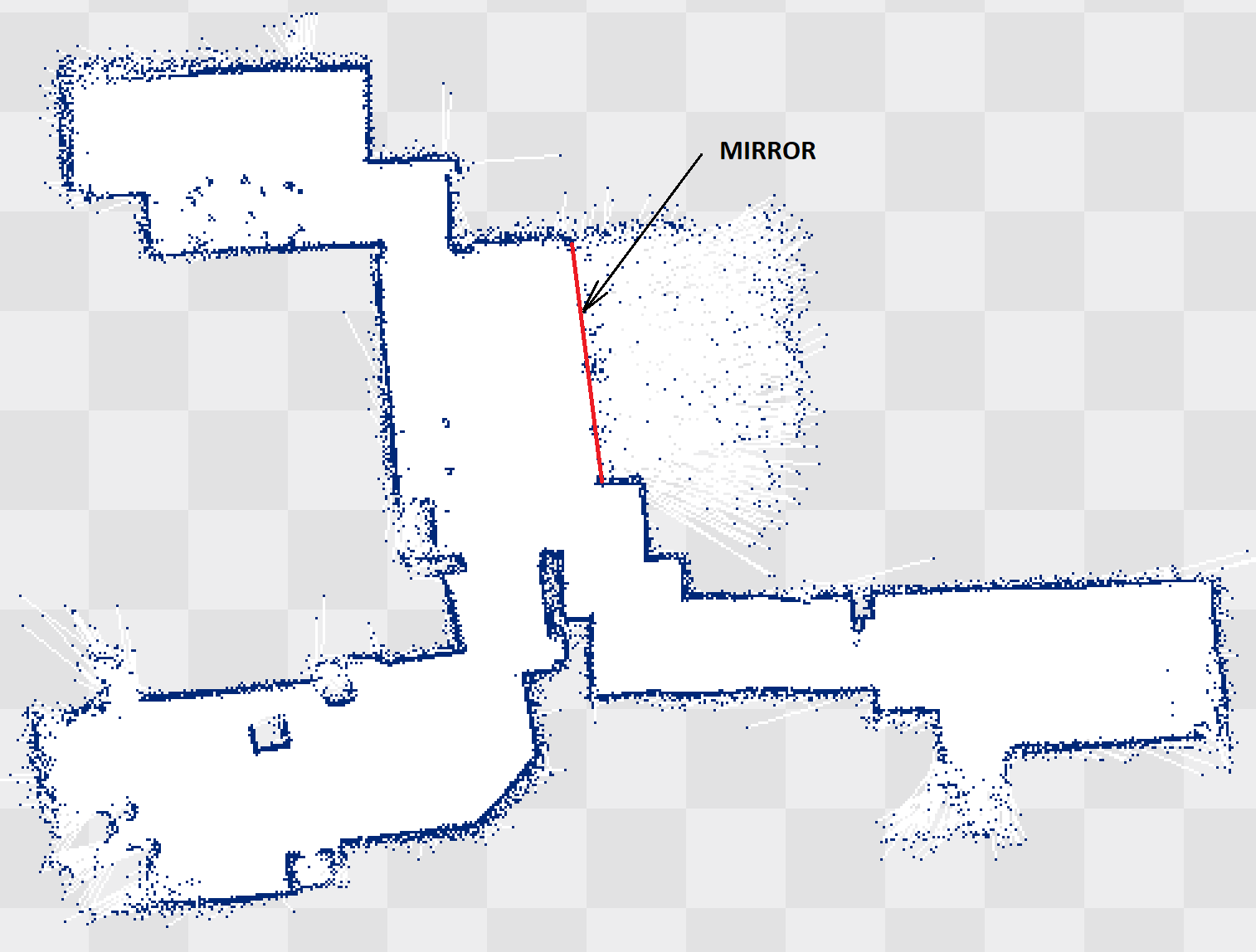
**配套软件**:提供PC端雷达扫描显示工具,并支持与Hector SLAM集成,可用于机器人建图和导航。
**社区支持**:项目有详细的Wiki文档和Hackaday页面,作者鼓励用户反馈和分享搭建经验。
技术规格
| 扫描速率 | 5 次/秒 |
|---|---|
| 每圈测量数 | 180 次 |
| 角分辨率 | 2 度 |
| 最大测距 | 4 米 |
| 测量精度 | ~3-5 cm @ 3米(取决于反射面颜色) |
| 测距方法 | 三角测量法 |
| 组件成本 | < $30(2023年后因传感器涨价可能更高) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| TSL1401CL 图像传感器 | 1 | — | 核心测距传感器,2023年后价格大幅上涨 |
| 步进电机或直流电机 | 1 | — | 用于旋转扫描 |
| 激光二极管模块 | 1 | — | 发射激光束 |
| 透镜/镜头 | 若干 | — | 用于聚焦和成像 |
| Arduino 或类似微控制器 | 1 | — | 控制传感器和电机 |
| 3D打印外壳和支架 | 1套 | — | 固定所有组件 |
| 电阻、电容、连接线等 | 若干 | — | 电路搭建 |
| 5V 电源模块 | 1 | — | 为系统供电 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 2/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 2/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库
视频
所需技能
🔧 **动手能力**:需要具备3D打印、电子焊接、机械组装等动手能力,能够搭建和调试硬件。
💻 **编程能力**:需要能够使用Arduino IDE进行固件烧录和调试,了解基本的C/C++编程。
⚡ **电子电路**:需要了解基本电子元件(传感器、电机、电阻等)的连接和电路搭建,能够使用万用表进行简单调试。
适用场景
**机器人自主导航**:为小型机器人提供实时环境扫描数据,用于避障和路径规划。
**SLAM建图**:与Hector SLAM等算法结合,构建室内环境地图。
**教学与实验**:作为低成本激光雷达教学平台,用于学习三角测距原理和传感器融合。
**DIY项目**:适合开源硬件爱好者、机器人爱好者进行DIY制作和二次开发。