FAST-LIO 快速激光雷达-惯性里程计
FAST_LIO
智能硬件
1/5
🧩 软硬件结合
已发布

项目简介
高效鲁棒的LIO包,实现LiDAR-惯性里程计。
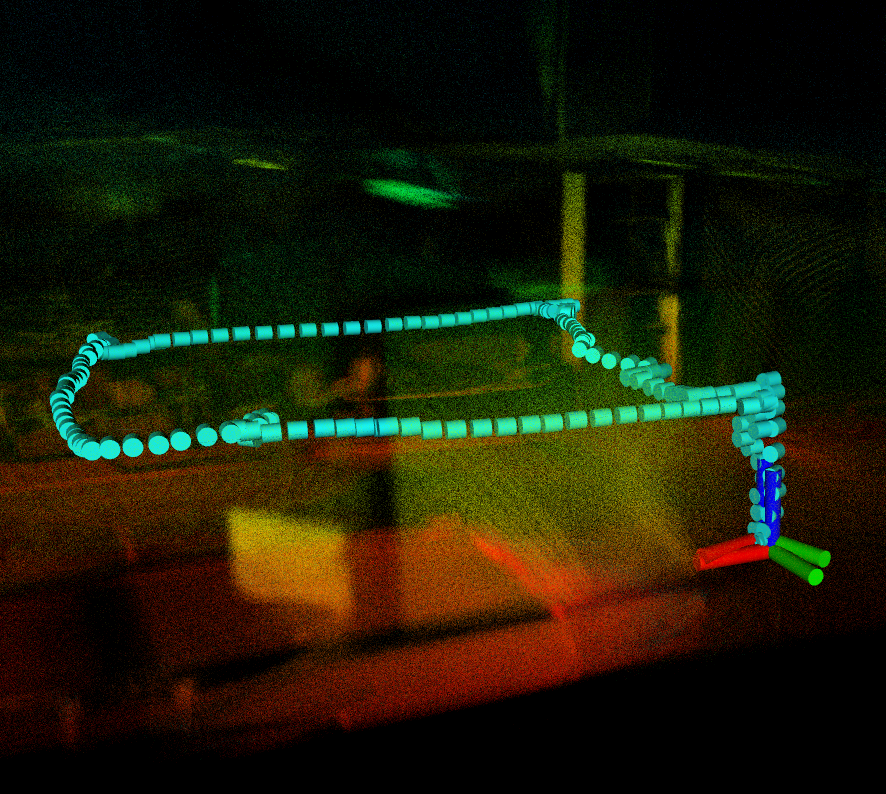
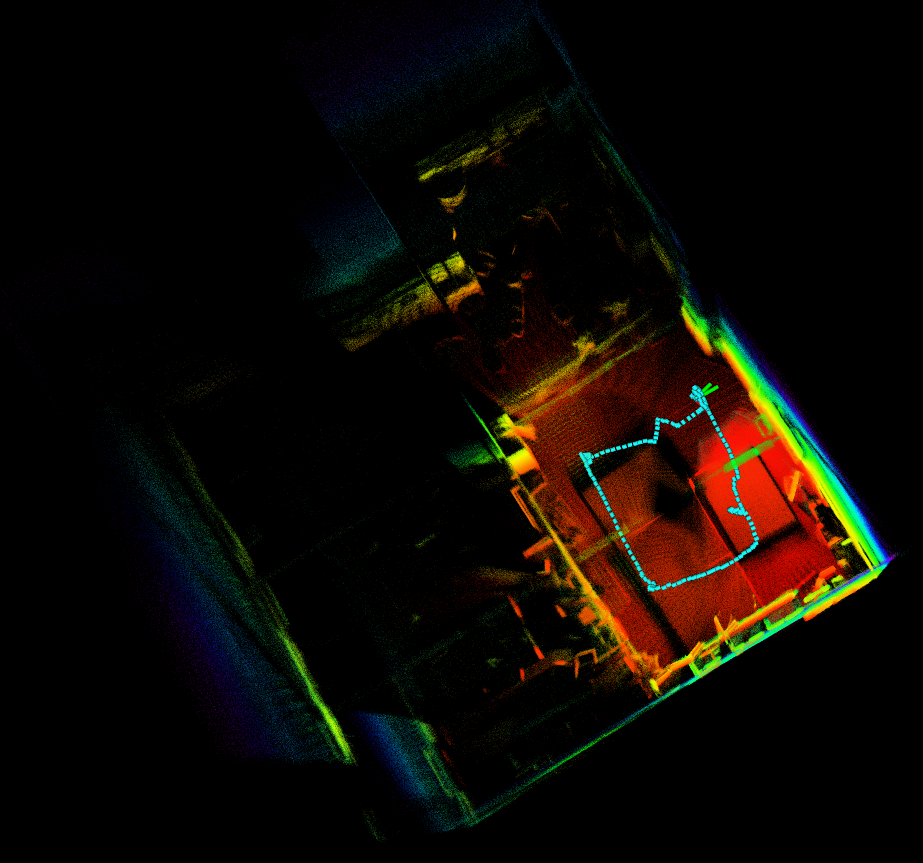
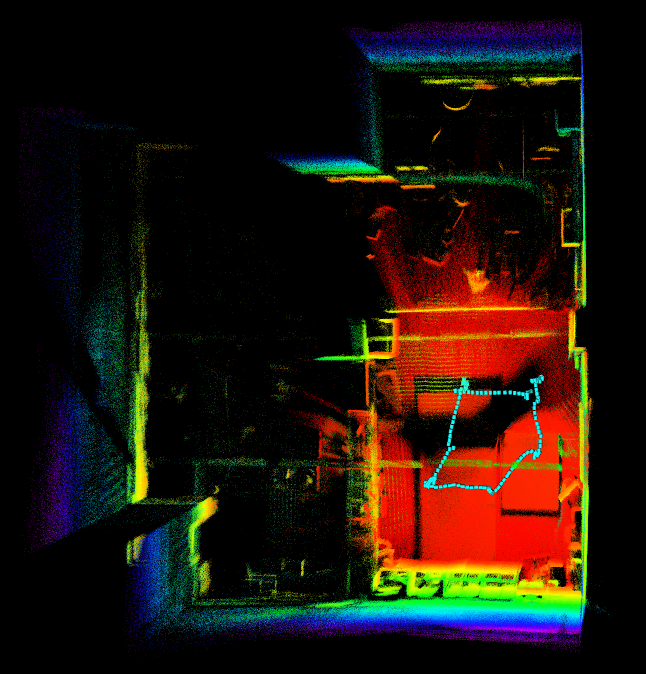
FAST-LIO 是由香港大学火星实验室(HKU MaRS Lab)开发的一款高效、鲁棒的激光雷达-惯性里程计(LiDAR-Inertial Odometry)开源项目。其核心功能是通过紧耦合的迭代扩展卡尔曼滤波器(IEKF),将激光雷达特征点与IMU数据进行深度融合,实现高精度、高频率的实时位姿估计与建图。
标签
项目特点
**紧耦合迭代卡尔曼滤波**:通过高效的迭代卡尔曼滤波器优化里程计,实现高精度状态估计。
**自动初始化**:在大多数稳态环境下可自动完成初始化,无需手动干预。
**并行KD-Tree搜索**:采用并行KD-Tree加速最近邻搜索,大幅降低计算开销。
**增量式建图 (FAST-LIO2)**:使用ikd-Tree进行增量式地图管理,支持超过100Hz的LiDAR速率。
**直接里程计 (FAST-LIO2)**:可直接对原始LiDAR点云进行扫描到地图的配准,无需特征提取,精度更高。
**多LiDAR支持**:支持旋转式(Velodyne, Ouster)和固态式(Livox Avia, Horizon, MID-70)LiDAR,易于扩展。
**外部IMU支持**:支持使用外部IMU进行数据融合。
**ARM平台兼容**:支持Khadas VIM3、Nvidia TX2、Raspberry Pi 4B等ARM架构平台。
技术规格
| 传感器融合 | LiDAR + IMU (紧耦合) |
|---|---|
| 核心算法 | 迭代扩展卡尔曼滤波 (IEKF) |
| https://raw.githubusercontent.com/hku-mars/FAST_LIO/main/doc/Fast_LIO_2.pdf)支持LiDAR类型 | 旋转式 (Velodyne, Ouster) / 固态式 (Livox) |
| 支持IMU类型 | 6轴/9轴 (内置或外置) |
| 最大LiDAR速率 | >100 Hz (FAST-LIO2) |
| 操作系统 | Ubuntu >= 16.04 |
| 中间件 | ROS (Melodic 或更高版本) |
| 依赖库 | PCL >= 1.8, Eigen >= 3.3.4, livox_ros_driver |
| 硬件平台 | x86, ARM (Khadas VIM3, TX2, RPi 4B) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| LiDAR (如 Livox Avia, Velodyne VLP-16) | 1 | — | 主传感器 |
| IMU (内置或外置) | 1 | — | 用于惯性测量 |
| 电脑 (x86) 或 ARM 开发板 (如 Nvidia TX2) | 1 | — | 运行算法 |
| USB 线缆 / 网线 | 若干 | — | 连接传感器与计算平台 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 5/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 5/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 1/5
🔵 创造与创新: 4/5
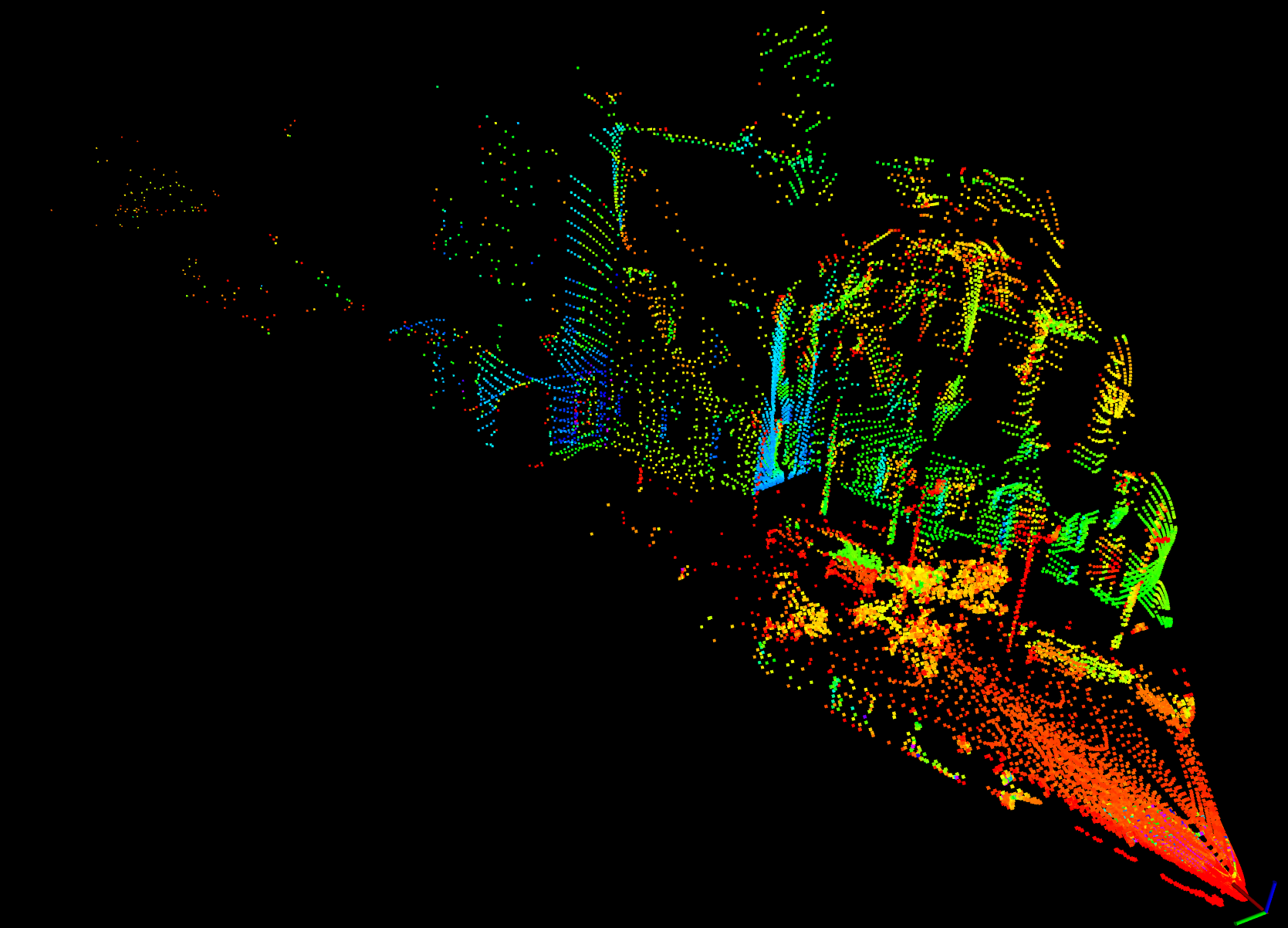
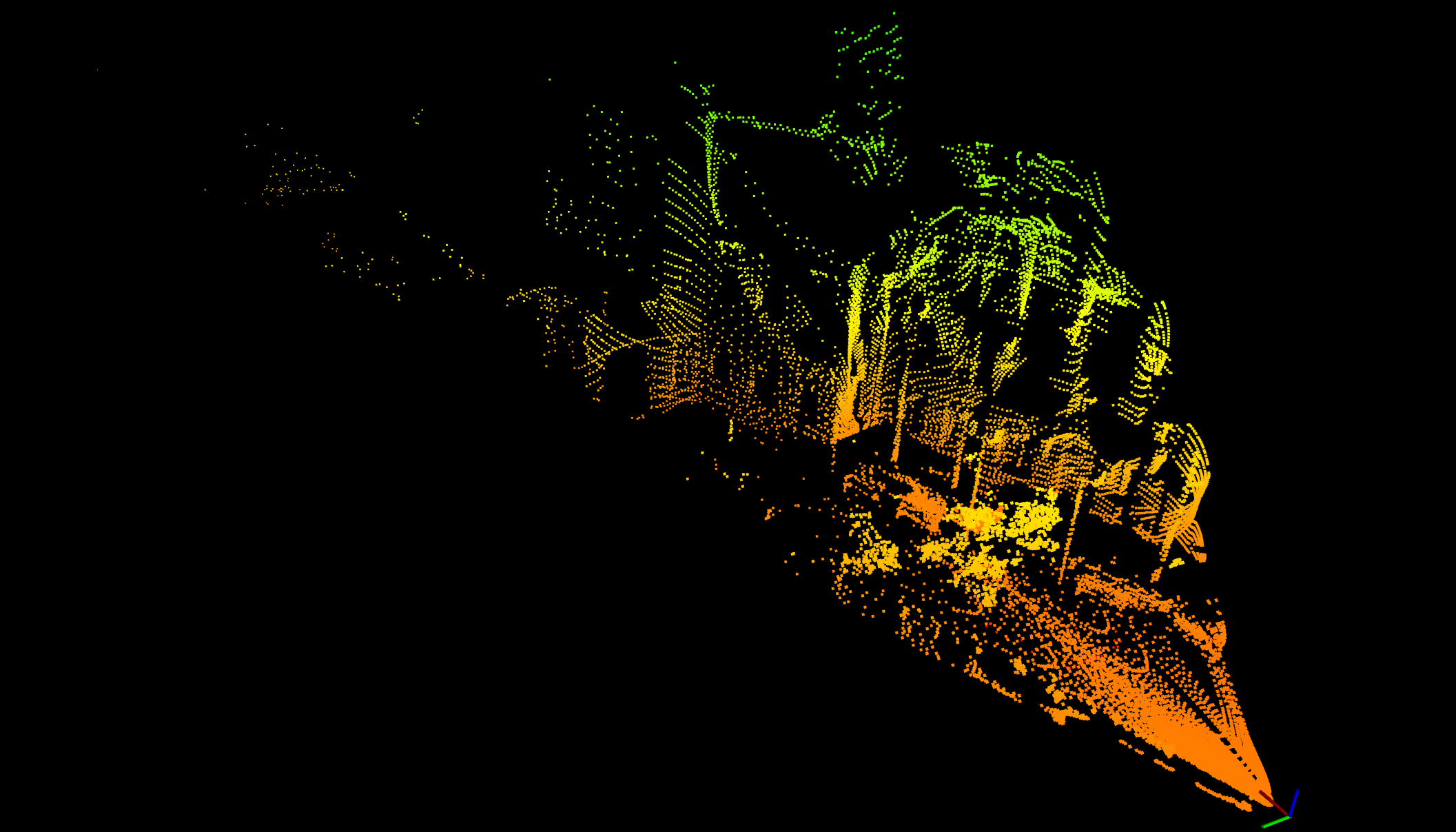
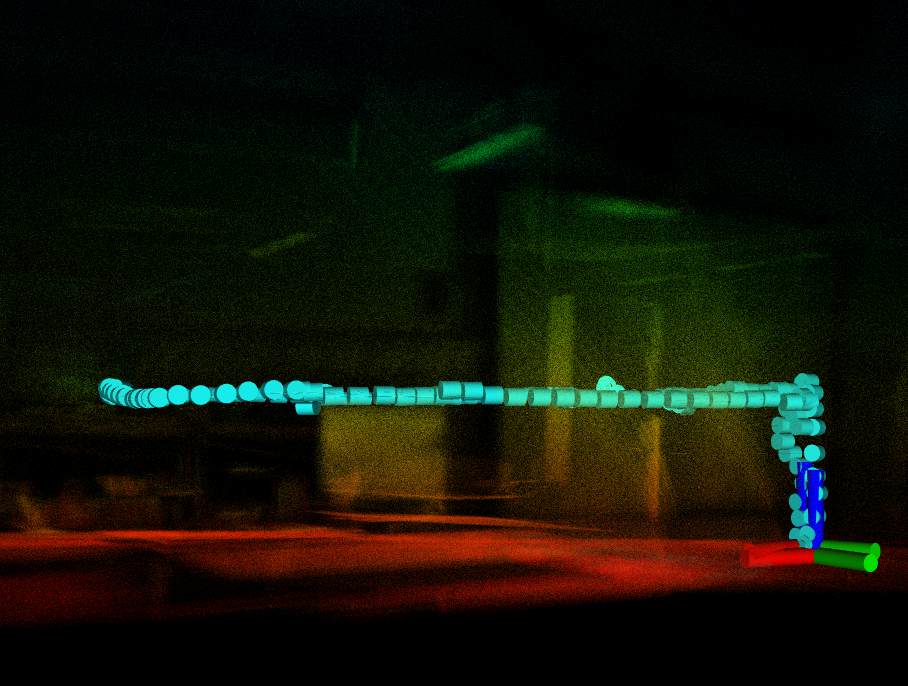
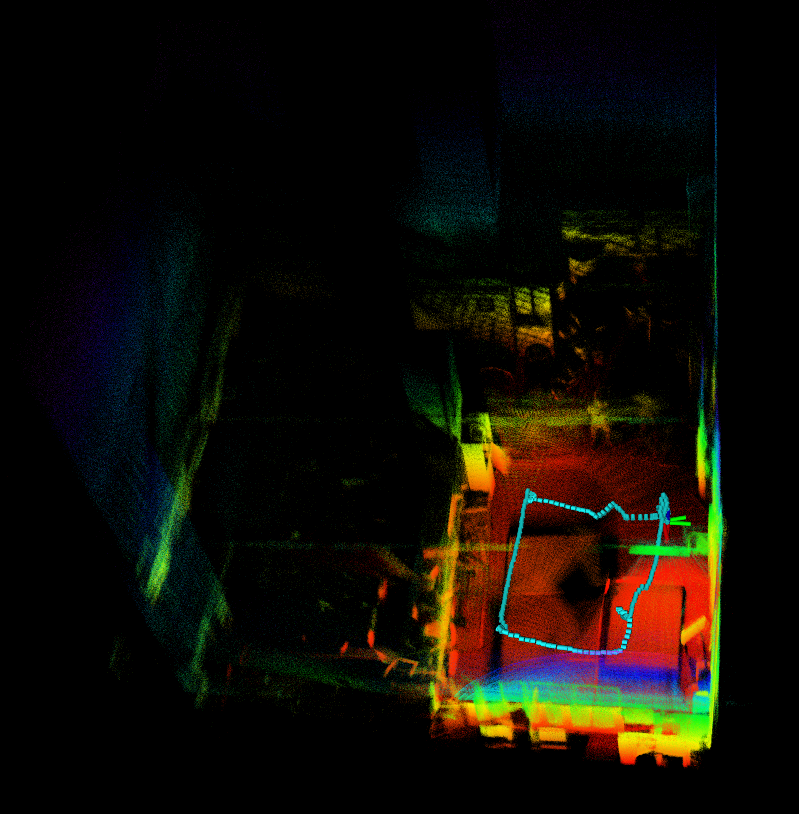
项目图库













所需技能
🔧 **动手能力**:能够组装和固定LiDAR、IMU等传感器,并连接至计算平台。
💻 **编程能力**:熟悉C++、ROS、Linux命令行操作,能够编译和调试代码。
⚡ **电子电路**:了解基本的传感器接口(如USB、以太网)和供电。
适用场景
**机器人自主导航**:为地面机器人、无人机等提供实时、鲁棒的位姿估计。
**自动驾驶**:作为车辆定位系统的核心模块,在复杂城市环境中提供高精度定位。
**三维建图与测绘**:快速生成高精度三维点云地图,用于环境重建、测绘等领域。
**增强现实/虚拟现实**:为AR/VR设备提供精确的头部或手柄追踪。