hdl_localization
hdl_localization
机器人
3/5
🧩 软硬件结合
已发布
项目简介
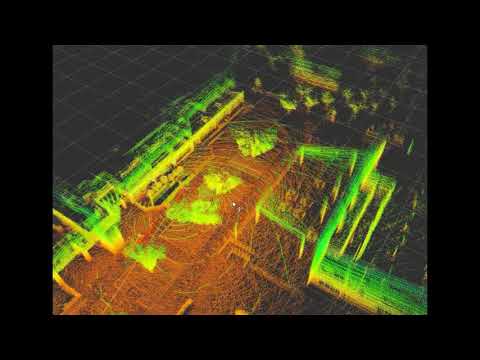
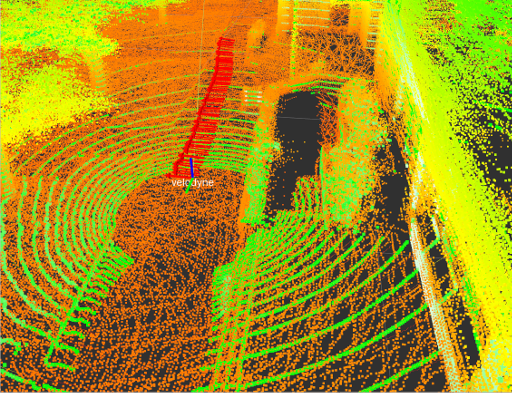
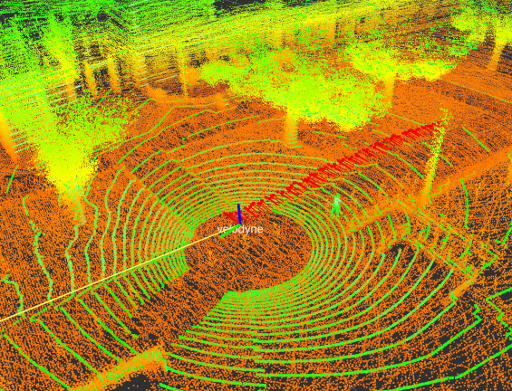
Real-time 3D localization using a (velodyne) 3D LIDAR
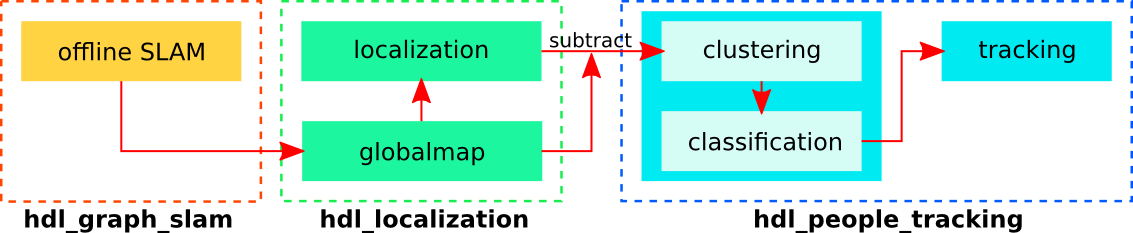
hdl_localization 是一个基于 ROS 的实时 3D 激光雷达定位开源项目,专为 Velodyne HDL32e、VLP16 等 3D LiDAR 设计,核心解决在已知全局地图中实现高精度、低延迟的位姿估计问题。该项目采用无迹卡尔曼滤波(UKF)框架,首先利用 LiDAR 内置的 IMU 数据预测传感器初始位姿,随后通过多线程 NDT(正态分布变换)扫描匹配,将实时点云与全局地图进行配准,从而修正预测位姿。若 IMU 数据不可用,系统会自动切换至恒速运动模型,保证鲁棒性。技术栈上,项目依赖 PCL、OpenMP 实现点云处理与并行加速,并集成了 ndt_omp 和 fast_gicp 等高效配准库,同时支持 CUDA 加速的 NDT 计算,进一步提升性能。主要特点包括:实时性高,适合车载或机器人平台;提供 /odom、/aligned_points 等话题输出位姿与对齐点云,以及 /relocalize 服务支持全局重定位;参数高度可配置,用户可通过 launch 文件调整扫描匹配策略。适用场景涵盖自动驾驶、移动机器人导航、仓储物流等需要长期稳定定位的环境。例如,在户外大范围场景中,项目提供的示例 bag 文件可演示从全局定位到持续跟踪的完整流程。此外,项目与 hdl_graph_slam、hdl_global_localization 等包形成生态,便于构建从建图到定位的完整解决方案。对于 CPU 占用过高的情况,可通过调整 ndt_neighbor_search_method 为 DIRECT1 换取速度与稳定性的平衡。
标签
项目特点
**实时3D定位**:利用3D LIDAR实现实时、高精度的位姿估计。
**无迹卡尔曼滤波**:融合IMU数据和NDT扫描匹配结果,提供鲁棒的位姿估计。
**多线程NDT扫描匹配**:采用多线程技术加速NDT配准过程,提高性能。
**全局重定位**:支持通过服务调用进行全局重定位,解决定位丢失问题。
**可配置参数**:提供丰富的ROS参数,允许用户调整算法行为以适应不同环境。
**Docker支持**:提供Docker镜像,简化环境配置和部署。
技术规格
| 传感器 | 3D LIDAR (如 Velodyne HDL32e, VLP16) |
|---|---|
| 定位方法 | 无迹卡尔曼滤波 (UKF) + NDT 扫描匹配 |
| 依赖库 | PCL, OpenMP, pcl_ros, ndt_omp, fast_gicp, hdl_global_localization |
| 输出话题 | /odom (nav_msgs/Odometry), /aligned_points, /status |
| 服务 | /relocalize (std_srvs/Empty) |
| 系统要求 | ROS (Kinetic/Melodic/Noetic), Ubuntu 16.04/18.04/20.04 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D LIDAR (如 Velodyne HDL32e/VLP16) | 1 | — | 核心传感器 |
| 搭载ROS的计算机 | 1 | — | 运行定位算法 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
⚪ 创造与创新: 3/5
项目图库
视频
所需技能
🔧 **动手能力**:需要搭建和配置ROS环境,连接和调试LIDAR传感器。
💻 **编程能力**:需要掌握C++和ROS编程,理解点云处理和卡尔曼滤波算法。
⚡ **电子电路**:需要了解LIDAR和IMU的硬件接口和通信协议。
适用场景
移动机器人室内外自主导航中的实时定位。
自动驾驶汽车在已知地图中的高精度定位。
机器人长期、大范围环境下的位姿跟踪。
需要结合IMU和LIDAR数据进行鲁棒定位的科研项目。