libpointmatcher
libpointmatcher
机器人
3/5
🧩 软硬件结合
已发布

项目简介
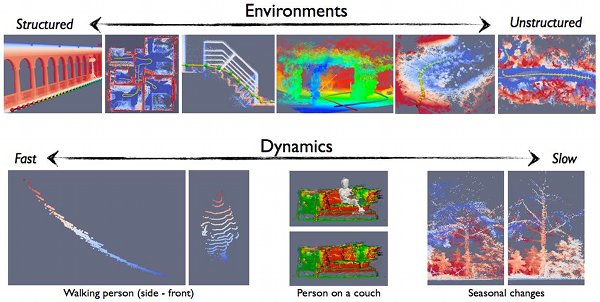
An Iterative Closest Point (ICP) library for 2D and 3D mapping in Robotics
libpointmatcher 是一个模块化的开源C++库,专门实现迭代最近点(ICP)算法,用于点云数据的精确配准和对齐。该库由加拿大拉瓦尔大学北方机器人实验室(Norlab)维护,最初源自ETH Zurich的自主系统实验室,在机器人和计算机视觉领域有着广泛应用。
标签
项目特点
**模块化设计**:ICP 算法的各个组件(如数据过滤、匹配、误差最小化)都是可替换的模块,方便定制和扩展。
**高性能**:使用 C++ 编写,并依赖高效的线性代数库 Eigen 和快速近邻搜索库 libnabo。
**多平台支持**:官方支持 Ubuntu (18.04, 20.04, 22.04) 和 x86/arm64 架构,并报告可在 macOS 和 Windows 上运行。
**Python 绑定**:提供 Python 接口,降低了使用门槛。
**完善的文档和教程**:提供从入门到高级的详细教程,以及完整的 Doxygen API 文档。
**丰富的 I/O 支持**:支持 CSV、VTK、PLY、PCD 等多种点云文件格式的导入和导出。
技术规格
| 核心算法 | 迭代最近点 (ICP) |
|---|---|
| 维度 | 2D 和 3D |
| 编程语言 | C++ (核心), Python (绑定) |
| 主要依赖 | Eigen 3, Boost (>=1.48), libnabo (>=1.0.7) |
| 支持操作系统 | Ubuntu 18.04/20.04/22.04 (官方测试), macOS, Windows (社区报告) |
| 支持架构 | x86, arm64/v8 |
| 构建系统 | CMake |
| 测试框架 | Google Test (GTest) |
| 许可证 | BSD |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Eigen 3 | 1 | — | C++ 矩阵和线性代数库 |
| Boost (>=1.48) | 1 | — | 便携式 C++ 库 |
| libnabo (>=1.0.7) | 1 | — | 快速 K 近邻搜索库 |
| CMake | 1 | — | 构建系统 |
| GTest | 1 | — | 单元测试框架 (可选) |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
🔵 创造与创新: 3/5
项目图库

视频
所需技能
🔧 **动手能力**:需要能够配置 C++ 编译环境、安装依赖库、使用 CMake 进行项目构建。熟悉 Linux 命令行操作是加分项。
💻 **编程能力**:需要具备 C++ 编程基础,理解 CMake 构建系统。了解点云处理和 ICP 算法的基本原理会有帮助。
⚡ **电子电路**:无需电子电路知识。
适用场景
**机器人 SLAM**:用于激光雷达或深度相机的点云数据配准,构建环境地图。
**计算机视觉**:用于 3D 物体识别、场景重建和姿态估计。
**自动驾驶**:用于车辆定位和环境感知中的点云对齐。
**学术研究**:作为研究点云配准算法的基础平台,进行算法比较和改进。
**工业检测**:用于 3D 扫描数据的对齐和拼接,进行质量检测。