Complex-YOLOv4-Pytorch
Complex-YOLOv4-Pytorch
3/5
🧩 软硬件结合
已发布

项目简介
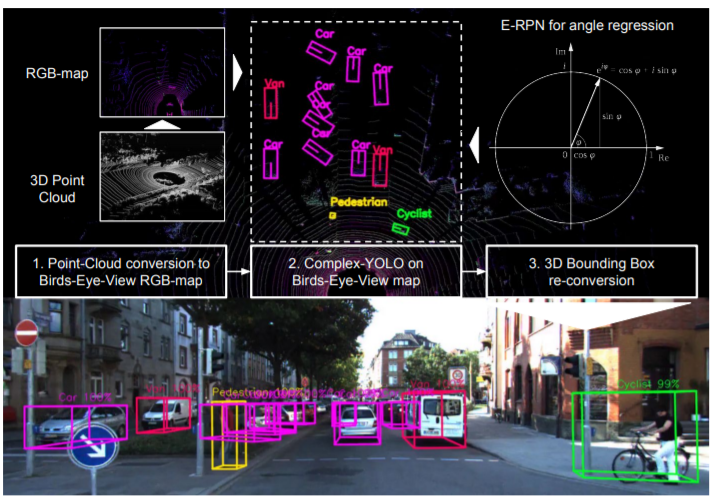
The PyTorch Implementation based on YOLOv4 of the paper: "Complex-YOLO: Real-time 3D Object Detection on Point Clouds"
Complex-YOLOv4-Pytorch 是一个基于 PyTorch 框架实现的开源三维目标检测项目,核心功能是将 YOLOv4 算法扩展至点云数据处理,实现实时、高精度的 3D 目标检测。该项目主要面向自动驾驶、机器人导航等需要从 LiDAR 点云中快速识别物体的场景,解决了传统三维检测方法计算量大、实时性差的问题。
标签
项目特点
基于 YOLOv4 的实时 3D 点云目标检测
支持分布式数据并行训练(Distributed Data Parallel)
集成 Tensorboard 训练过程可视化
支持 Mosaic 和 Cutout 数据增强
使用旋转框的 GIoU 损失函数进行优化
提供预训练模型,支持快速推理和评估
支持 BEV(鸟瞰图)和相机图像的可视化
技术规格
| 框架 | PyTorch |
|---|---|
| 基础算法 | YOLOv4 |
| 输入数据 | 3D LiDAR 点云 (KITTI 数据集) |
| 输出 | 3D 边界框 (位置、尺寸、朝向) |
| 数据增强 | Mosaic, Cutout, 随机缩放/旋转 |
| 损失函数 | GIoU Loss (旋转框) |
| 激活函数 | Mish |
| 骨干网络 | CSPDarknet (含 Cross-stage partial connections) |
| 特殊模块 | SPP-block, SAM-block, PAN path-aggregation block |
| 训练方式 | 单机单卡 / 多机多卡分布式训练 |
| 可视化 | Tensorboard, BEV 图像, 相机图像 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Python 3.x | 1 | — | 开发环境 |
| PyTorch | 1 | — | 深度学习框架 |
| CUDA & cuDNN | 1 | — | GPU 加速(推荐) |
| KITTI 3D 检测数据集 | 1 | — | 约 57 GB(含点云、标签、标定、图像) |
| 预训练权重 | 1 | — | 可选,用于快速推理 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 5/5
⚪ 动手与操作: 1/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库
视频
所需技能
🔧 **动手能力**:无需硬件组装,但需要配置深度学习环境和数据集。
💻 **编程能力**:需要掌握 Python、PyTorch 框架、命令行操作,理解 YOLO 系列算法和 3D 点云处理原理。
⚡ **电子电路**:不涉及。
适用场景
自动驾驶环境感知中的实时 3D 目标检测
机器人导航与避障
智能交通系统中的车辆和行人检测
学术研究:3D 目标检测算法改进与对比实验
工业自动化中的 LiDAR 数据处理