OpenPCDet
OpenPCDet
3/5
🧩 软硬件结合
已发布

项目简介
OpenPCDet Toolbox for LiDAR-based 3D Object Detection.
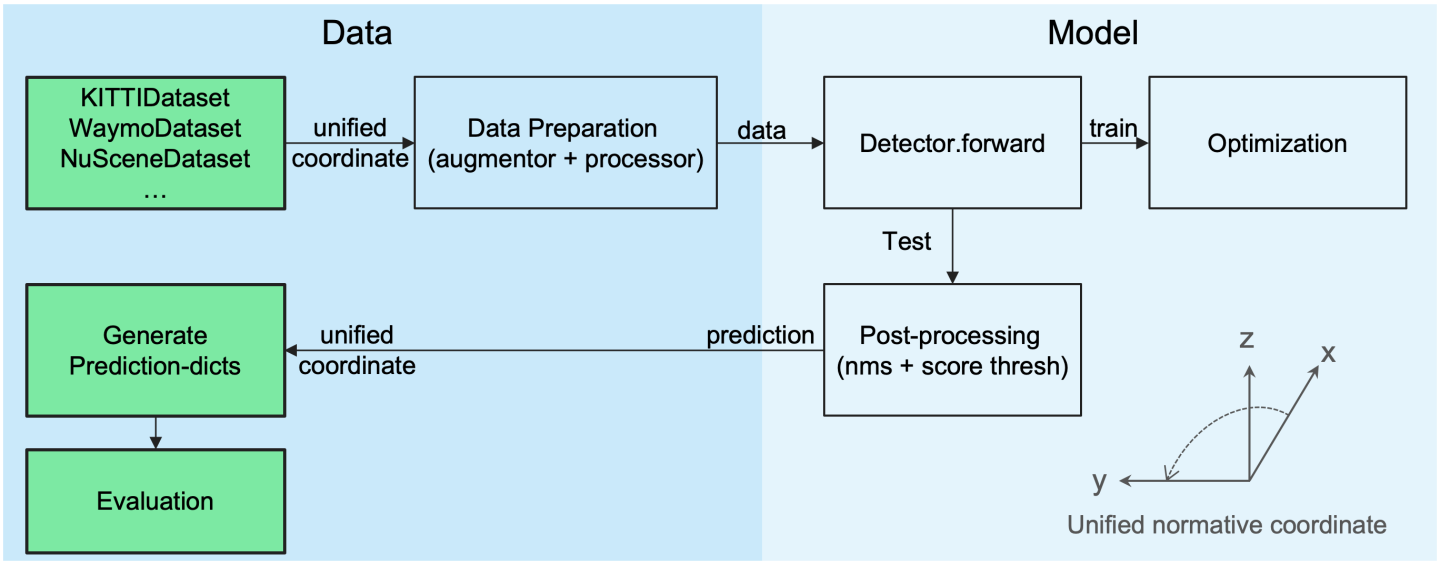
OpenPCDet 是一个清晰、简洁且高度自包含的开源项目,专注于基于激光雷达(LiDAR)的三维目标检测。作为业界公认的标杆性框架,它不仅是多项顶级学术论文(如 PointRCNN、Part-A2-Net、PV-RCNN、Voxel R-CNN、PV-RCNN++ 及 MPPNet)的官方代码实现,更是一个功能完备的算法研究与工程落地平台。
标签
项目特点
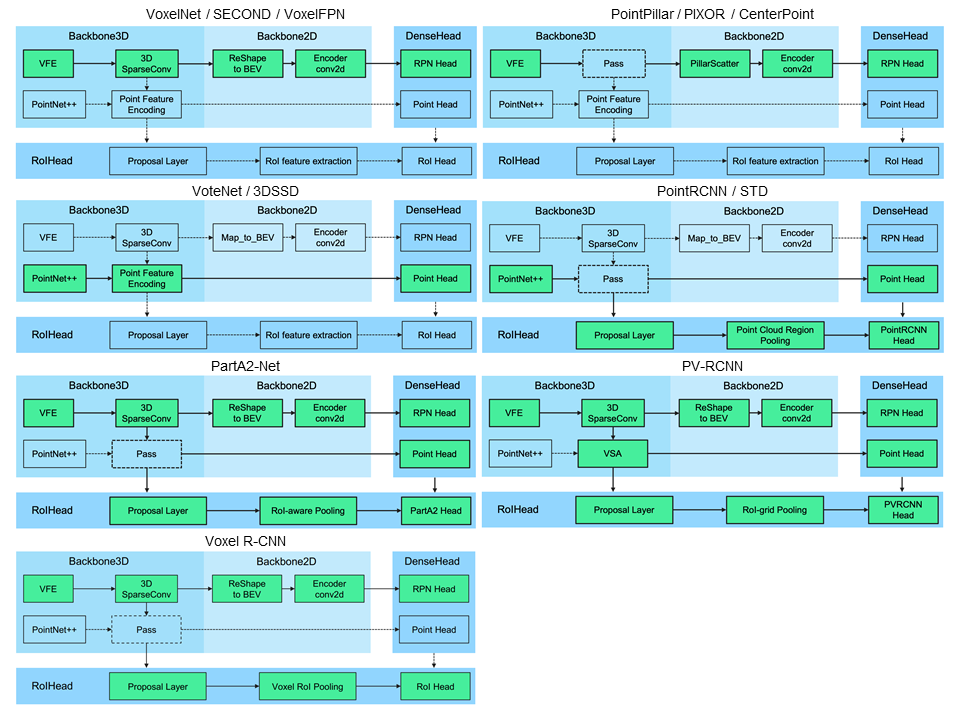
支持多种最先进的 LiDAR 3D 目标检测模型,包括 PointPillar、SECOND、PointRCNN、Part-A2、PV-RCNN、Voxel R-CNN、CenterPoint、VoxelNeXt、DSVT 等
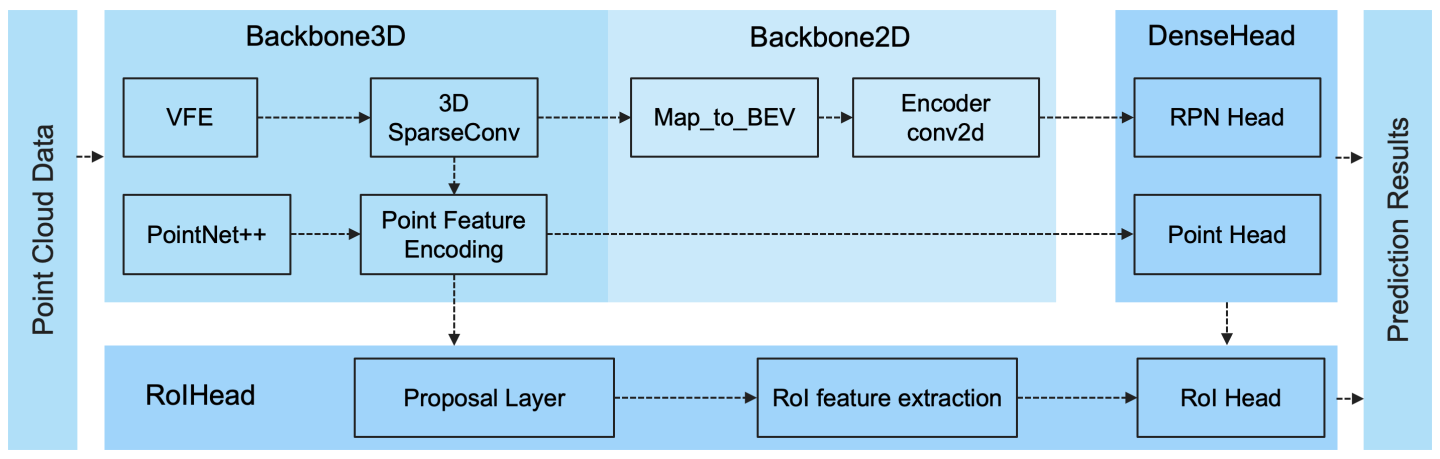
统一的数据-模型分离设计,便于扩展到自定义数据集
支持单阶段和两阶段 3D 检测框架
支持多 GPU 分布式训练与测试
支持多模态(LiDAR + 相机)3D 检测(如 BEVFusion、TransFusion)
提供丰富的预训练模型下载,覆盖 KITTI、NuScenes、Waymo 等数据集
支持 TensorRT 加速推理(如 DSVT 可达 27Hz)
支持 Docker 部署
技术规格
| 框架 | PyTorch 1.1~1.10 |
|---|---|
| 点云坐标 | 统一点云坐标系 |
| 3D 框定义 | (x, y, z, dx, dy, dz, heading) |
| 支持的模型 | PointPillar, SECOND, PointRCNN, Part-A2, PV-RCNN, Voxel R-CNN, CenterPoint, VoxelNeXt, DSVT, BEVFusion, TransFusion, MPPNet, Focals Conv 等 |
| 支持的数据集 | KITTI, NuScenes, Waymo Open Dataset, Lyft, Pandaset, Argoverse2 |
| 支持的 spconv 版本 | 1.0~2.x |
| 分布式训练 | 支持多 GPU、多机 |
| 可视化 | 支持 Open3D 可视化 |
| 最新版本 | v0.6.0 (2022-09) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| GPU (如 GTX 1080Ti / TITAN XP) | 8 | — | 用于训练,单 GPU 也可用于推理 |
| 内存 | 32GB+ | — | 推荐 |
| 存储 | 500GB+ | — | 用于存储数据集和模型 |
| Ubuntu 18.04/20.04 | 1 | — | 推荐操作系统 |
| PyTorch 1.1~1.10 | 1 | — | 深度学习框架 |
| spconv 1.0~2.x | 1 | — | 稀疏卷积库 |
| CUDA | 10.0+ | — | GPU 加速 |
| Open3D | 1 | — | 可视化(可选) |
| Docker | 1 | — | 容器化部署(可选) |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 5/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库

所需技能
🔧 **动手能力**:需要配置深度学习环境(CUDA、PyTorch、spconv),处理数据集(下载、预处理、生成数据库),运行训练和测试脚本。
💻 **编程能力**:需要 Python 编程基础,熟悉 PyTorch 框架,能够阅读和修改配置文件(YAML),理解深度学习模型训练流程。
⚡ **电子电路**:不涉及硬件电路,但需要理解 LiDAR 点云数据的基本概念和 3D 目标检测原理。
适用场景
自动驾驶领域的 3D 目标检测研究与开发
机器人导航中的障碍物检测
智慧城市中的交通监控与分析
学术研究:对比不同 3D 检测算法的性能
工业应用:基于 LiDAR 的物体识别与定位系统