interactive_slam
interactive_slam
机器人
4/5
🧩 软硬件结合
已发布
项目简介
Interactive Map Correction for 3D Graph SLAM
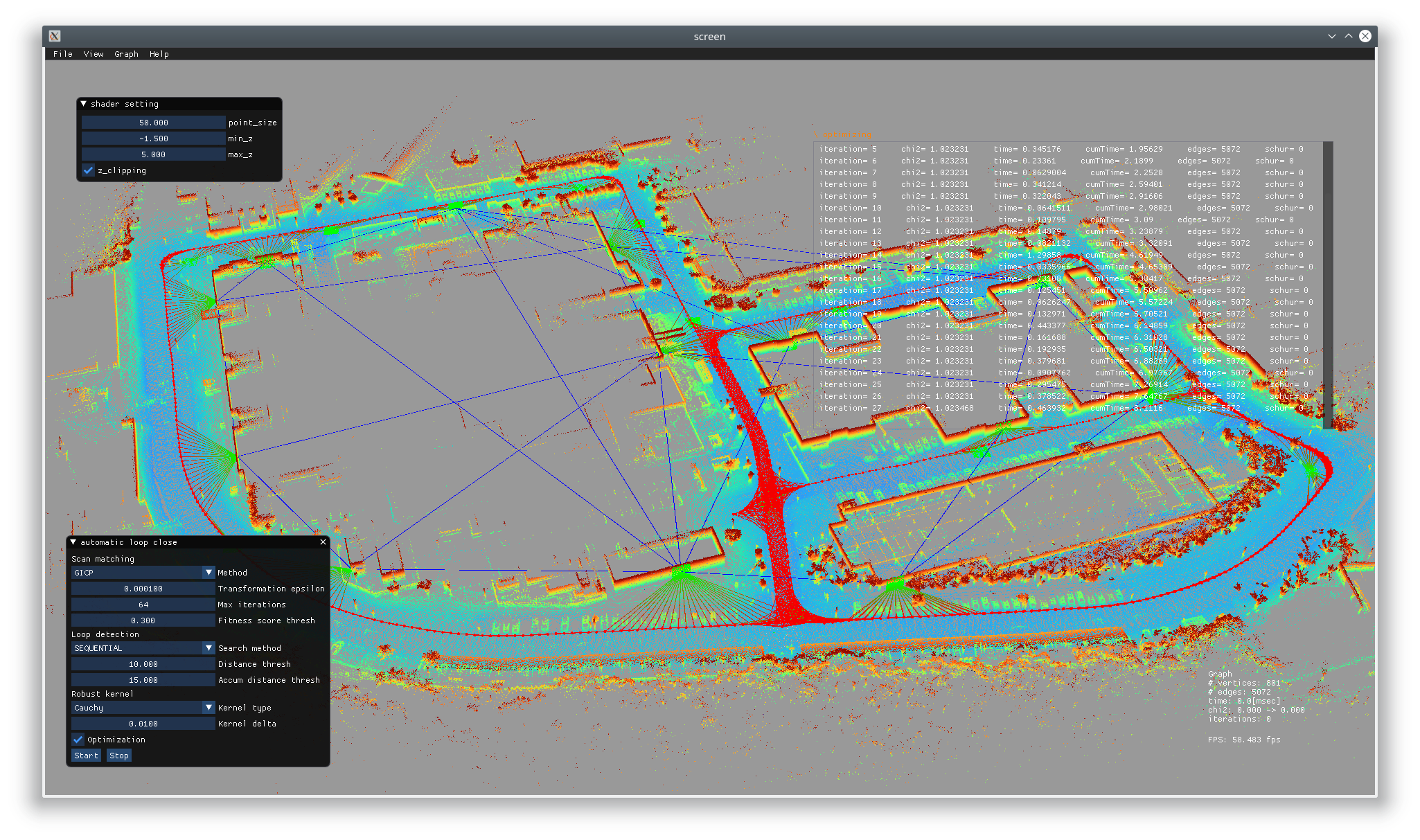
interactive_slam 是一个基于 3D 激光雷达的开源半自动建图框架,旨在解决传统自动 SLAM 系统在复杂环境中容易出现的建图失败问题,例如里程计漂移、回环检测错误以及地图扭曲等。与完全自动化的 SLAM 包不同,该框架的核心创新在于引入人机交互机制,允许用户以最小的操作代价,直观地修正地图中的错误。
标签
项目特点
**交互式地图校正**:提供图形用户界面,允许用户手动或自动地修正SLAM建图过程中的错误。
**多种校正功能**:支持手动/自动回环闭合、基于平面的地图校正、多地图合并以及自动位姿边优化。
**基于ROS生态**:构建在ROS之上,可以方便地集成其他ROS SLAM包生成的位姿图或里程计数据。
**开源与社区支持**:代码开源,并提供了详细的示例、FAQ和相关论文。
技术规格
| 核心功能 | 交互式3D图SLAM地图校正 |
|---|---|
| 输入数据 | 位姿图(由hdl_graph_slam等生成)或里程计数据(ROS话题) |
| 依赖库 | ROS, PCL, g2o, Ceres Solver, GL3W, GLFW, Dear ImGui, OpenMP |
| 操作系统 | Ubuntu 18.04 (ROS Melodic) 或更新版本 |
| 许可证 | GPL-3.0 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 搭载Ubuntu 18.04+的计算机 | 1 | — | 用于运行ROS和SLAM算法 |
| 3D LiDAR传感器 | 1 | — | 用于采集点云数据 |
| ROS (Melodic或更新版本) | 1 | — | 机器人操作系统 |
| PCL (点云库) | 1 | — | 点云处理 |
| g2o | 1 | — | 图优化库 |
| Ceres Solver | 1 | — | 非线性最小二乘求解器 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 3/5
项目图库

视频
所需技能
🔧 **动手能力**:需要具备搭建和操作3D LiDAR传感器及计算机硬件的能力。
💻 **编程能力**:需要熟悉C++、ROS(机器人操作系统)以及CMake构建系统。能够编译和调试复杂的SLAM库。
⚡ **电子电路**:基本了解传感器与计算机的连接(如以太网、USB)。
适用场景
**机器人建图失败后的手动校正**:当自动SLAM算法产生错误地图(如漂移、扭曲)时,使用此工具进行交互式修正。
**多源地图融合**:将不同时间或不同传感器采集的多个地图进行合并和校正。
**高精度地图构建**:在复杂或大规模环境中,通过人工介入来确保最终地图的精度和一致性。
**SLAM算法研究与开发**:作为研究平台,用于测试和验证新的地图校正或优化算法。