LIO-SAM
LIO-SAM
AI视觉
1/5
🧩 软硬件结合
已发布

项目简介
LIO-SAM:紧耦合激光雷达惯性里程计,通过平滑与建图实现。
LIO-SAM 是一个面向机器人实时定位与建图的开源框架,专注于解决激光雷达与惯性测量单元(IMU)的紧耦合问题。该项目由 Tixiao Shan 开发,在 LOAM 系列算法的基础上引入了因子图优化,实现了比传统方法快 10 倍以上的实时处理能力。
标签
项目特点
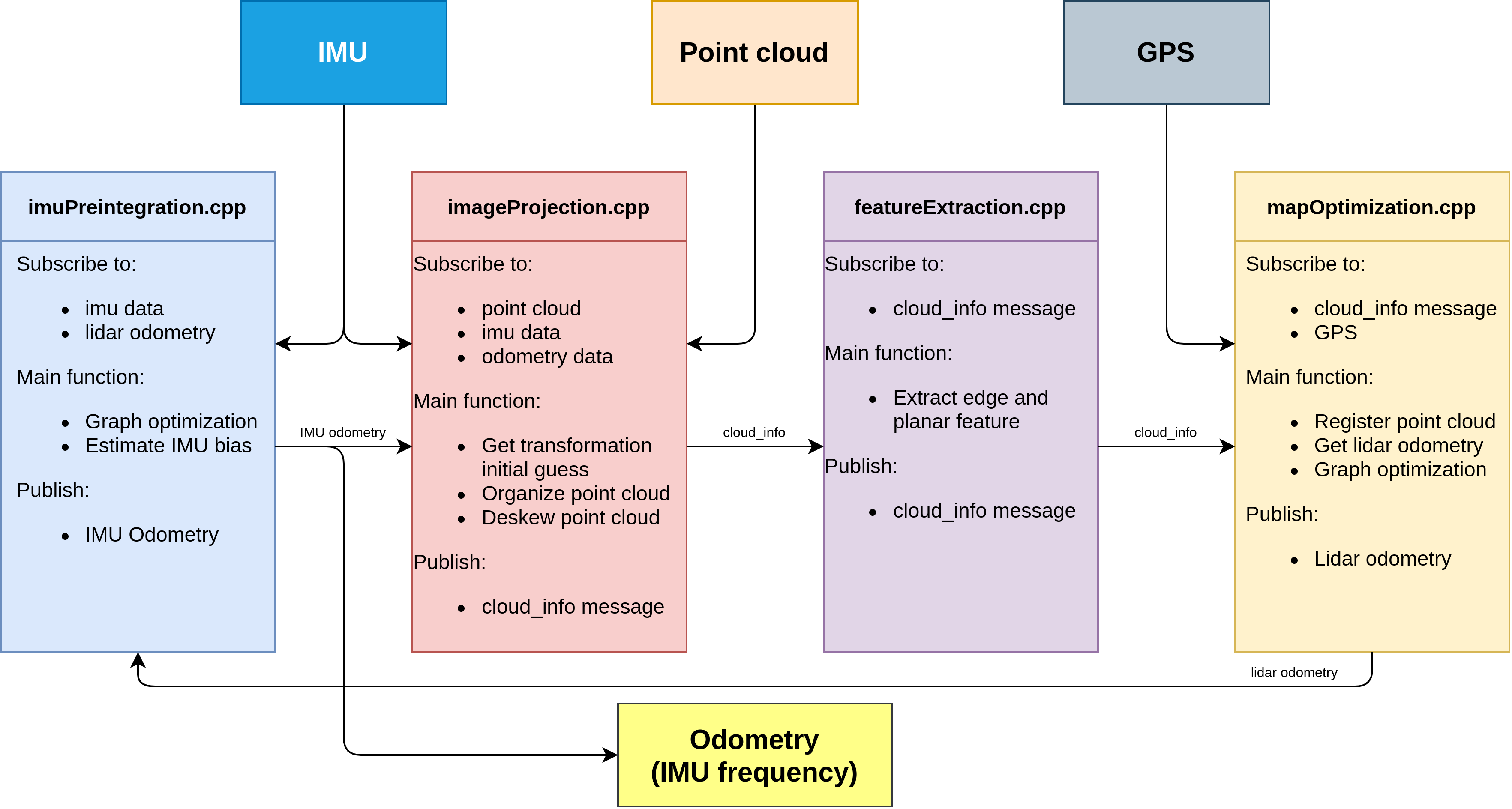
**紧耦合融合**:通过因子图优化,将激光雷达里程计因子、IMU 预积分因子和 GPS 因子进行紧耦合,提升定位精度和鲁棒性。
**实时性能**:系统运行速度比实时快10倍以上,支持高频 IMU 数据(推荐200Hz以上)和激光雷达数据。
**双因子图架构**:一个因子图用于全局优化(含 GPS 和回环),另一个因子图用于实时 IMU 偏置估计和里程计输出。
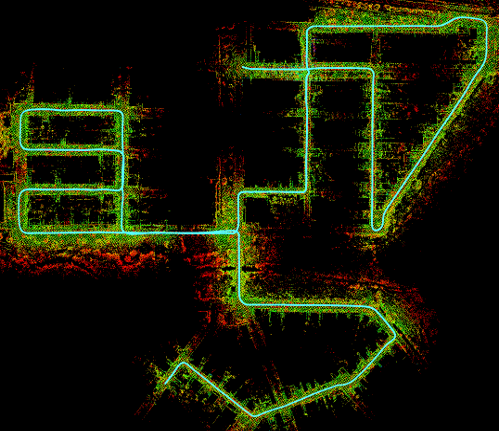
**点云去畸变**:利用 IMU 数据对激光雷达点云进行运动畸变校正,提高建图质量。
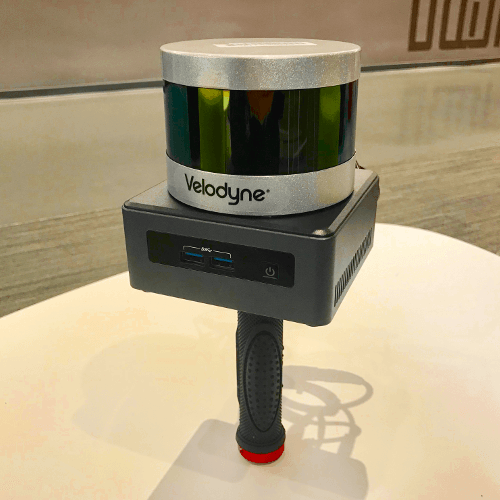
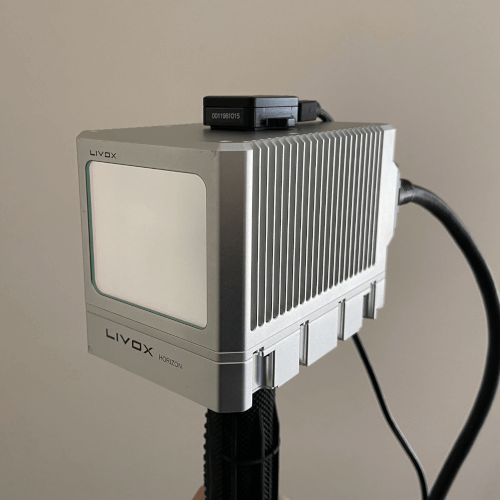
**支持多种传感器**:兼容 Velodyne、Ouster、Livox Horizon 等机械式激光雷达,以及 9 轴 IMU(6 轴 IMU 需额外适配)。
**回环检测**:集成基于 ICP 的回环检测功能(可替换为更先进的 ScanContext 等方案)。
**GPS 融合**:支持 GPS 数据作为全局约束,修正累积漂移。
**提供示例数据集**:包含步行、公园、花园、校园、KITTI 等多种场景的测试数据。
技术规格
| 系统架构 | 双因子图(全局优化 + 实时里程计) |
|---|---|
| 传感器要求 | 机械式激光雷达(Velodyne/Ouster/Livox Horizon)+ 9轴IMU(推荐200Hz以上) |
| 运行速度 | 实时10倍以上 |
| 点云去畸变 | 基于IMU数据的运动畸变校正 |
| 回环检测 | ICP-based(可替换) |
| GPS融合 | 支持,可配置协方差阈值 |
| 坐标系 | ROS REP-105(x-前,y-左,z-上) |
| 依赖 | ROS (Kinetic/Melodic/Noetic)、gtsam 4.0 |
| 编程语言 | C++ |
| 支持平台 | Ubuntu (16.04/18.04/20.04) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 机械式激光雷达(如 Velodyne VLP-16) | 1 | — | 需支持点时间戳和环号输出 |
| 9轴IMU(如 Microstrain 3DM-GX5-25) | 1 | — | 推荐输出频率≥200Hz |
| GPS接收器(可选) | 1 | — | 用于全局约束 |
| 工控机或笔记本电脑(运行ROS) | 1 | — | 推荐配置:4核CPU,8GB RAM |
| Ubuntu 16.04/18.04/20.04 | 1 | — | 操作系统 |
| ROS Kinetic/Melodic/Noetic | 1 | — | 机器人操作系统 |
| gtsam 4.0 | 1 | — | 因子图优化库 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
🔵 数理与计算: 5/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
🔵 创造与创新: 4/5
项目图库













所需技能
🔧 **动手能力**:需要搭建传感器套件(激光雷达+IMU),进行硬件安装和标定,以及调试IMU数据变换。
💻 **编程能力**:需要掌握 C++ 和 ROS 编程,理解因子图优化原理,能够修改参数文件和调试代码。
⚡ **电子电路**:需要了解传感器接口(如 Ethernet、USB、串口),能够连接和配置激光雷达和 IMU。
适用场景
**机器人自主导航**:为移动机器人提供高精度实时定位和建图,适用于室内外环境。
**自动驾驶**:为无人车提供激光雷达-惯性融合的里程计估计,支持 GPS 辅助。
**无人机定位**:适用于搭载激光雷达和 IMU 的无人机,提供稳定的位姿估计。
**测绘与建图**:用于高精度三维地图构建,如城市级地图采集。
**科研与教育**:作为 SLAM 算法研究平台,可用于测试新的回环检测、GPS 融合等算法。