GLIM 3D激光雷达建图框架
glim
项目简介
GLIM: versatile and extensible point cloud-based 3D localization and mapping framework
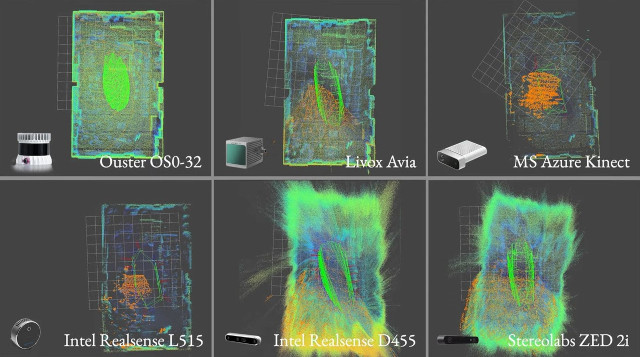
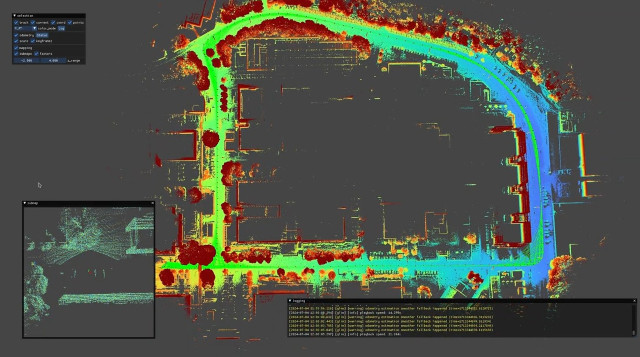
GLIM 是一个功能全面且高度可扩展的基于距离传感器的三维地图构建框架。它通过直接多扫描配准误差最小化技术,在因子图上实现高精度的地图一致性,并支持 GPU 加速以最大化建图速度与质量。其核心优势在于准确性、易用性、通用性和可扩展性。GLIM 消除了对特定传感器的依赖,能够适配多种距离传感器,包括旋转式激光雷达(如 Velodyne HDL32e、Ouster OS1-32)、非重复扫描激光雷达(如 Livox Avia、MID360)、固态激光雷达(如 Intel Realsense L515)以及 RGB-D 相机(如 Microsoft Azure Kinect),极大拓宽了应用场景。项目提供了交互式地图修正界面,用户可以手动纠正建图失败或优化结果,降低了使用门槛。此外,GLIM 设计了全局回调槽机制,允许开发者访问建图过程的内部状态并向因子图添加额外约束,配合官方提供的扩展包(glim_ext),可轻松实现显式回环检测、LiDAR-视觉-惯性里程计等高级功能。技术栈上,GLIM 基于 Eigen、nanoflann、GTSAM 和 gtsam_points 等库,并可选支持 CUDA、OpenCV、OpenMP 及 ROS/ROS2 集成。它解决了传统建图框架在传感器兼容性、精度和人工干预方面的痛点,适用于从高精度机器人自主导航、环境重建到低算力设备(如树莓派)上的实时建图等多种场景。项目已在 Ubuntu 22.04/24.04 及 NVIDIA Jetson Orin 上完成测试,并基于 MIT 许可证开源。
标签
项目特点
技术规格
| 支持传感器 | 旋转式LiDAR (Velodyne HDL32e, Ouster OS1-32)、非重复扫描LiDAR (Livox Avia, MID360)、固态LiDAR (Intel Realsense L515)、RGB-D相机 (Microsoft Azure Kinect) |
|---|---|
| 核心算法 | 基于因子图的直接多扫描配准误差最小化,GPU加速的GICP匹配成本因子 |
| 依赖项 | Eigen, nanoflann, GTSAM, gtsam_points |
| 可选依赖 | CUDA, OpenCV, OpenMP, ROS/ROS2, Iridescence |
| 测试平台 | Ubuntu 22.04 / 24.04, CUDA 12.2 / 12.6 / 13.1, NVIDIA Jetson Orin (Jetpack 6.1) |
| 许可证 | MIT |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 激光雷达或RGB-D相机 | 1 | — | 支持多种类型,如Velodyne、Livox、Azure Kinect等 |
| 带有NVIDIA GPU的计算机 | 1 | — | 推荐使用CUDA加速,也可在低配设备上运行轻量模式 |
| Ubuntu 22.04/24.04 | 1 | — | 操作系统 |
| CUDA Toolkit | 1 | — | 可选,用于GPU加速 |
| ROS2 | 1 | — | 可选,用于ROS2集成 |
能力画像
项目图库