hdl_graph_slam
hdl_graph_slam
机器人
4/5
🧩 软硬件结合
已发布

项目简介
3D LIDAR-based Graph SLAM
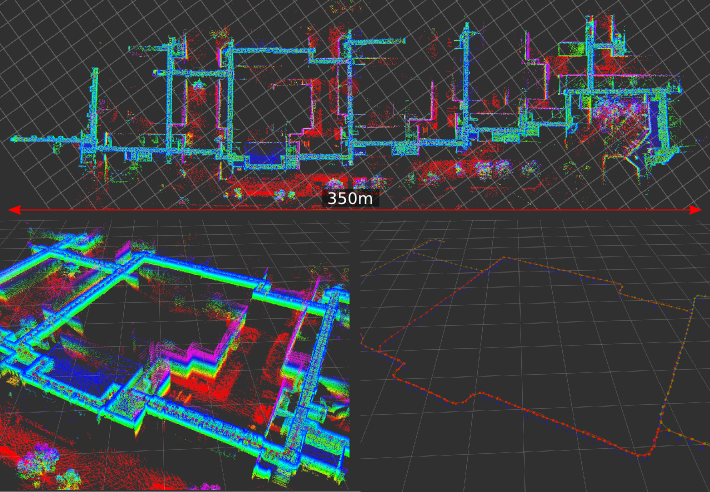
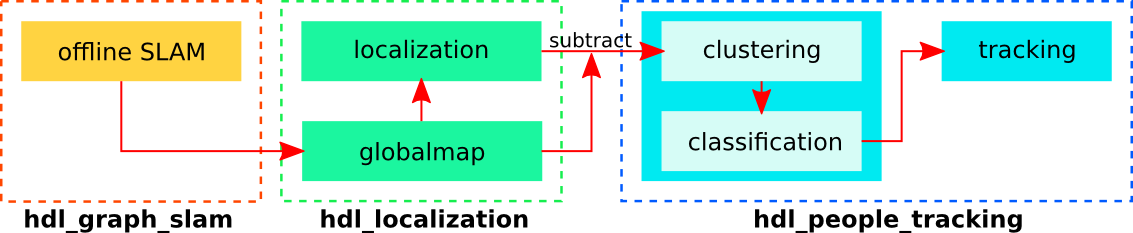
hdl_graph_slam 是一个基于 ROS 的开源实时 6 自由度 3D SLAM 系统,专为使用 3D 激光雷达进行同步定位与地图构建而设计。该项目通过 3D 图优化 SLAM 框架,结合基于 NDT 的扫描匹配里程计与闭环检测,实现了高精度的位姿估计。其核心架构由四个节点组成:预处理节点负责点云降采样,扫描匹配里程计节点通过连续帧匹配估计传感器运动,地面检测节点利用 RANSAC 算法提取平面,而主图优化节点则整合所有约束进行全局优化。为了进一步提升鲁棒性,系统支持多种图约束,包括 GPS 绝对位置约束、IMU 加速度计提供的重力向量约束、磁力计提供的姿态约束,以及通过地面平面约束来补偿室内大场景下的累积旋转误差。用户可以通过启动文件灵活启用或禁用每种约束,并调整其权重和鲁棒核函数。该方案主要解决了单一激光雷达里程计在长距离或复杂环境中累积误差过大的问题,适用于室内外环境下的机器人自主导航、无人车定位以及三维地图构建等场景。项目已在 Velodyne(如 HDL32e、VLP16)和 RoboSense 等主流 16 线及以上激光雷达上经过验证,并提供了丰富的参数配置接口与数据保存服务,方便开发者进行二次开发与系统集成。
标签
项目特点
**实时 6DOF SLAM**:基于 3D 激光雷达,提供实时位姿估计和地图构建。
**NDT 扫描匹配**:使用 NDT 算法进行里程计估计和回环检测,鲁棒性强。
**多约束图优化**:支持 GPS、IMU(加速度/方向)、地板平面等多种约束,提高建图精度。
**模块化节点设计**:由四个 nodelet 组成(预滤波、扫描匹配里程计、地板检测、图SLAM),易于扩展和复用。
**丰富的参数配置**:所有约束均可通过 launch 文件启用/禁用,并可调整权重和鲁棒核函数。
**提供示例数据**:包含室内和室外场景的 rosbag 数据,方便用户测试和评估。
技术规格
| 传感器支持 | Velodyne (HDL32e, VLP16), RoboSense (16线) |
|---|---|
| 操作系统 | ROS Melodic / Noetic (Ubuntu 18.04/20.04) |
| 核心算法 | 3D Graph SLAM, NDT Scan Matching, RANSAC 地板检测 |
| 图约束类型 | 里程计、回环、GPS、IMU加速度、IMU方向、地板平面 |
| 输出地图格式 | PCD (点云数据) |
| 依赖库 | OpenMP, PCL, g2o, suitesparse, ndt_omp, fast_gicp |
| 编程语言 | C++ |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D 激光雷达 (如 Velodyne VLP16) | 1 | — | 核心传感器 |
| IMU (如 Applanix POS LV) | 1 | — | 可选,用于提供加速度和方向约束 |
| GPS 接收器 | 1 | — | 可选,用于提供位置约束 |
| 工控机或笔记本电脑 (运行 ROS) | 1 | — | 运行 SLAM 算法 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 5/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 5/5
🔵 动手与操作: 3/5
🔵 狂热与坚持: 3/5
🔵 创造与创新: 3/5
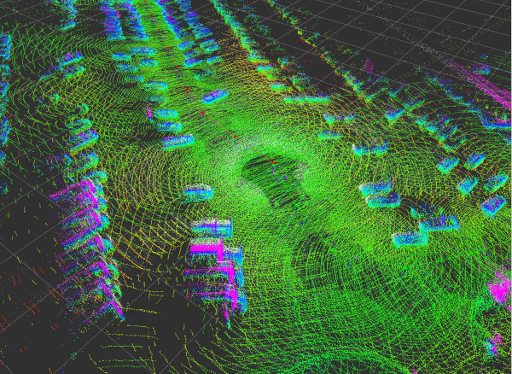
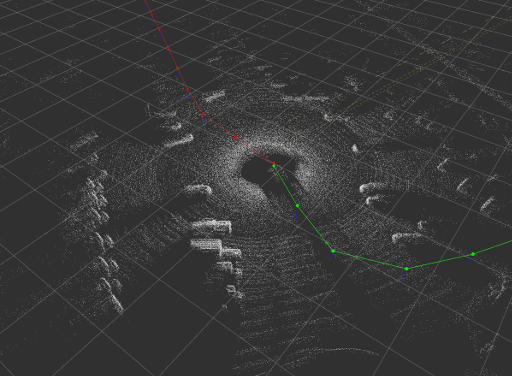
项目图库



所需技能
🔧 **动手能力**:需要能够搭建和配置机器人平台,包括安装激光雷达、IMU、GPS 等传感器,并确保其与计算平台正确连接。
💻 **编程能力**:需要具备 C++ 和 ROS 开发经验,能够理解 SLAM 算法原理,修改和调试 launch 文件与参数,并能够将本包集成到自己的机器人系统中。
⚡ **电子电路**:需要了解传感器与工控机之间的基本电气连接(如以太网、串口),并能够处理传感器驱动和标定问题。
适用场景
**机器人自主导航**:为移动机器人提供实时、高精度的定位和地图构建能力,用于室内外环境下的导航。
**自动驾驶**:为无人车提供基于激光雷达的环境感知和定位解决方案。
**三维重建与测绘**:用于大型室内外场景的三维点云地图生成,如建筑、工厂、矿区等。
**多传感器融合定位研究**:作为研究平台,探索 GPS、IMU、激光雷达等多种传感器在 SLAM 中的融合方法。