直接激光雷达-惯性里程计
direct_lidar_inertial_odometry
机器人
3/5
🧩 软硬件结合
已发布
项目简介
[IEEE ICRA'23] A new lightweight LiDAR-inertial odometry algorithm with a novel coarse-to-fine approach in constructing
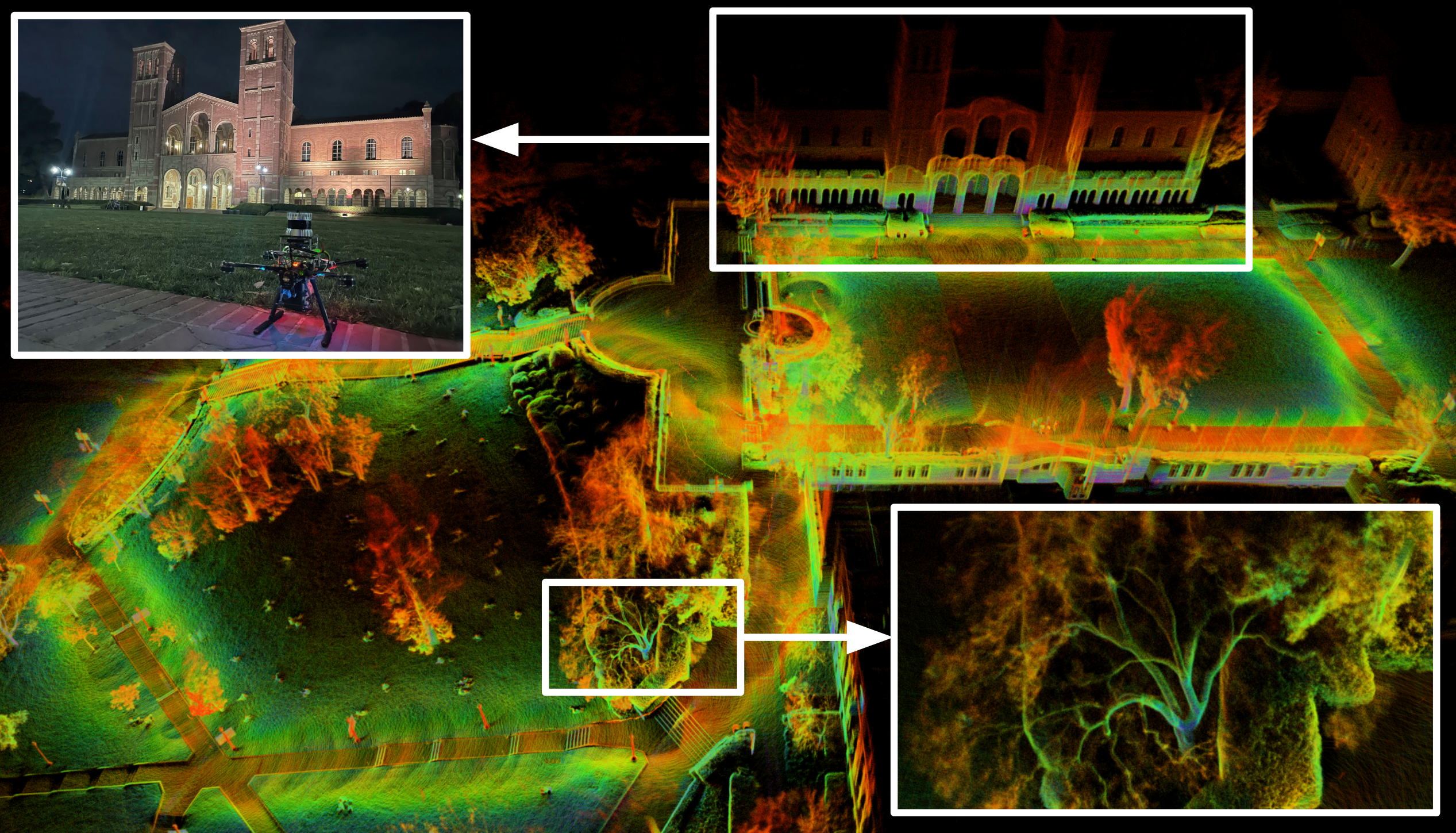
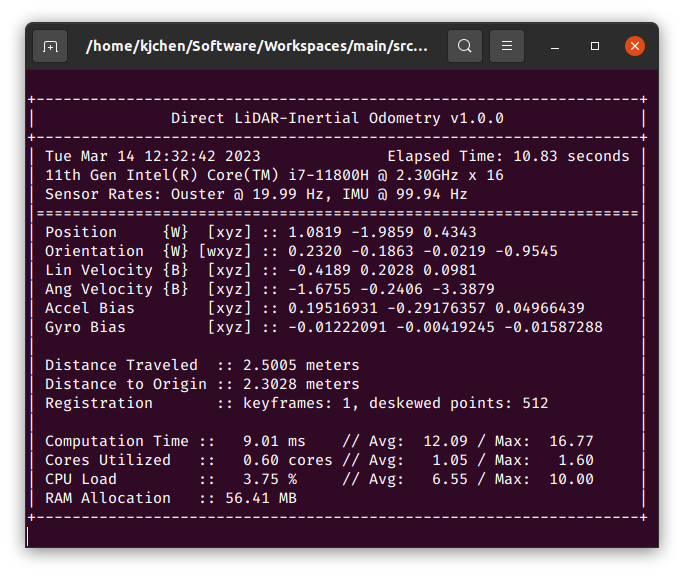
Direct LiDAR-Inertial Odometry(DLIO)是一种轻量级的激光雷达-惯性里程计算法,由加州大学洛杉矶分校VECTR实验室开发,并在2023年IEEE ICRA会议上发表。该项目的核心创新在于提出了一种新颖的“由粗到精”连续时间轨迹构建方法,用于精确的运动畸变校正,从而显著提升了在剧烈运动场景下的定位精度和鲁棒性。
标签
项目特点
**轻量级设计**:算法计算效率高,适合资源受限的机器人平台。
**连续时间运动校正**:通过由粗到精的方法构建连续时间轨迹,有效校正运动畸变。
**多传感器支持**:兼容 Ouster、Velodyne、Hesai 和 Livox 等主流激光雷达。
**ROS 集成**:基于 ROS 框架,易于集成到现有机器人系统中。
**开源免费**:采用 MIT 许可证,可自由使用和修改。
技术规格
| 算法类型 | 激光雷达-惯性里程计 (LIO) |
|---|---|
| 输入数据 | 激光雷达点云 (sensor_msgs::PointCloud2) + 6轴IMU (sensor_msgs::Imu) |
| 支持激光雷达 | Ouster, Velodyne, Hesai, Livox |
| 操作系统 | Ubuntu 20.04 |
| ROS 版本 | ROS Noetic (默认), ROS2 (feature/ros2 分支) |
| 编程语言 | C++14 |
| 依赖库 | OpenMP >= 4.5, PCL >= 1.10.0, Eigen >= 3.3.7 |
| 构建工具 | catkin_tools |
| 输出 | 机器人位姿估计、点云地图 (可保存为 .pcd) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 激光雷达 (LiDAR) | 1 | — | Ouster/Velodyne/Hesai/Livox |
| 6轴IMU | 1 | — | 可与激光雷达集成 |
| 计算机 | 1 | — | 运行Ubuntu 20.04和ROS |
| Ubuntu 20.04 | 1 | — | 操作系统 |
| ROS Noetic | 1 | — | 机器人操作系统 |
| PCL (Point Cloud Library) | 1 | — | 点云处理库 |
| Eigen3 | 1 | — | 线性代数库 |
| OpenMP | 1 | — | 并行计算库 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
🔵 创造与创新: 3/5
项目图库



视频
所需技能
🔧 **动手能力**:需要搭建和配置激光雷达与IMU传感器硬件,进行传感器标定和时间同步。
💻 **编程能力**:需要掌握C++编程、ROS框架使用、CMake构建系统,以及点云处理库(PCL)和线性代数库(Eigen)的基本使用。
⚡ **电子电路**:需要了解传感器连接和通信协议(如ROS消息类型),以及基本的硬件调试能力。
适用场景
**机器人自主导航**:为移动机器人提供实时、精确的位姿估计,支持自主导航和避障。
**无人机飞行控制**:在GPS信号不佳的环境下,为无人机提供可靠的姿态和位置估计。
**自动驾驶汽车**:作为车辆定位系统的一部分,提供高频率、低延迟的里程计信息。
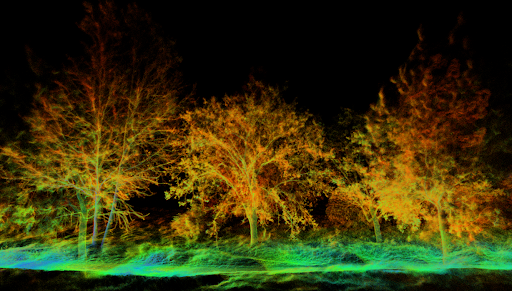
**三维建图**:生成高精度的三维点云地图,用于环境感知和测绘。
**学术研究**:作为SLAM和里程计算法的研究平台,进行算法改进和性能评估。