cylon
JavaScript framework for robotics, drones, and the Internet of Things (IoT)
wechat-go
go version wechat web api and message framework for building wechat robot
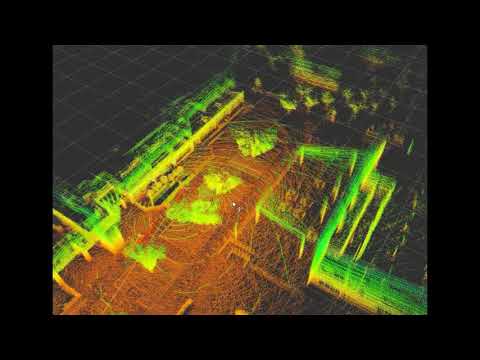
hdl_localization
Real-time 3D localization using a (velodyne) 3D LIDAR
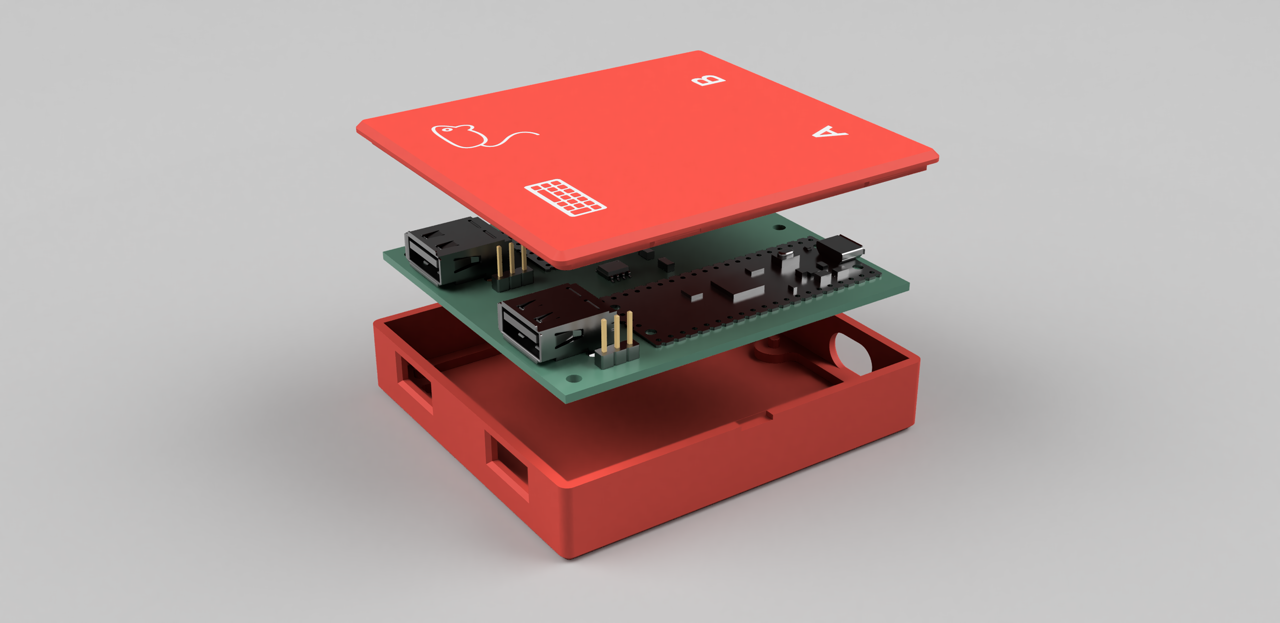
deskhop
Fast Desktop Switching Device
PuloversMacroCreator
Automation Utility - Recorder & Script Generator
interactive_slam
Interactive Map Correction for 3D Graph SLAM
Thor
DIY 3D Printable Robotic Arm
any4lerobot
LeRobot实用工具集合。
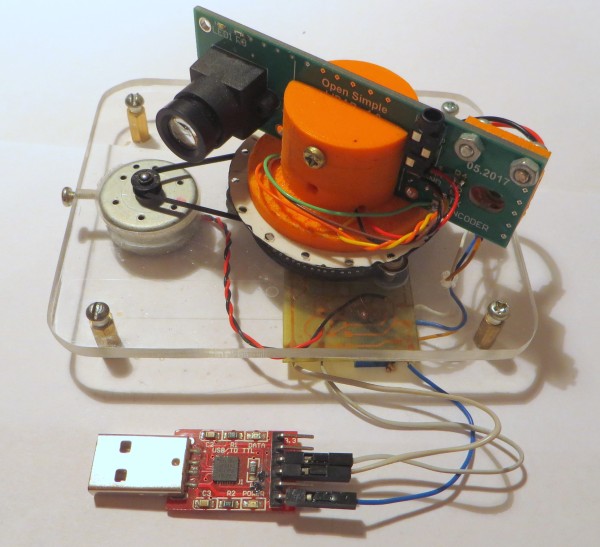
OpenSimpleLidar
Open Source scanning laser rangefinder
SwarmUI
Necessary material to build and use Zooids to create Swarm User Interfaces
towr
A light-weight, Eigen-based C++ library for trajectory optimization for legged robots.
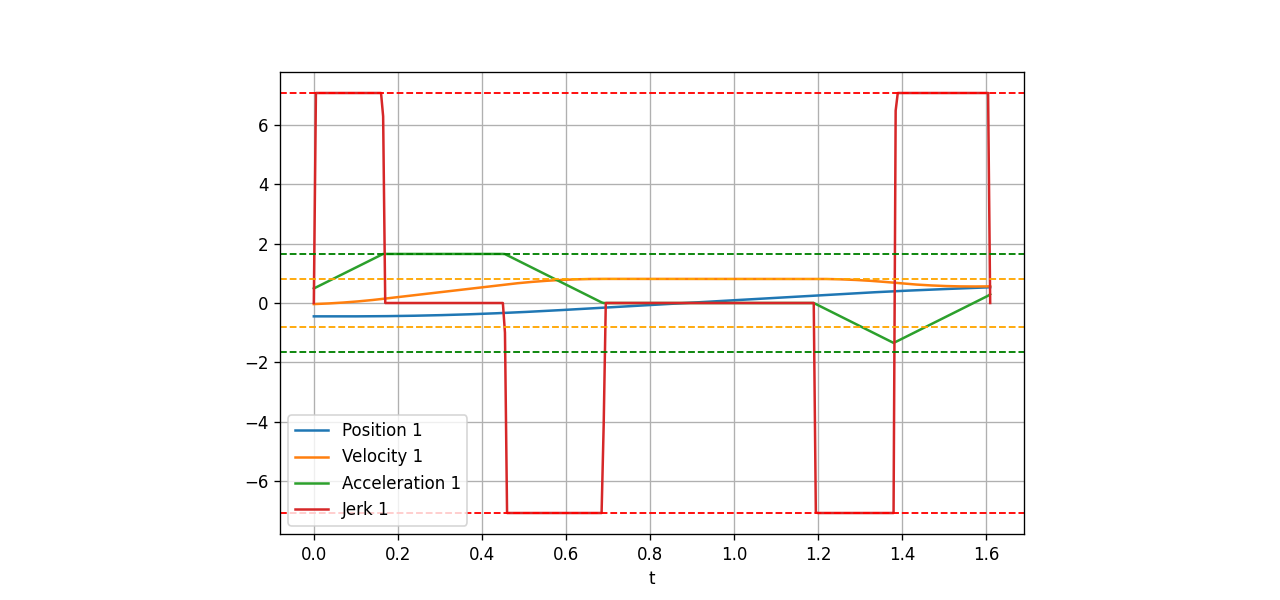
ruckig
Motion Generation for Robots and Machines. Real-time. Jerk-constrained. Time-optimal.
glim
GLIM: versatile and extensible point cloud-based 3D localization and mapping framework
direct_lidar_inertial_odometry
[IEEE ICRA'23] A new lightweight LiDAR-inertial odometry algorithm with a novel coarse-to-fine approach in constructing
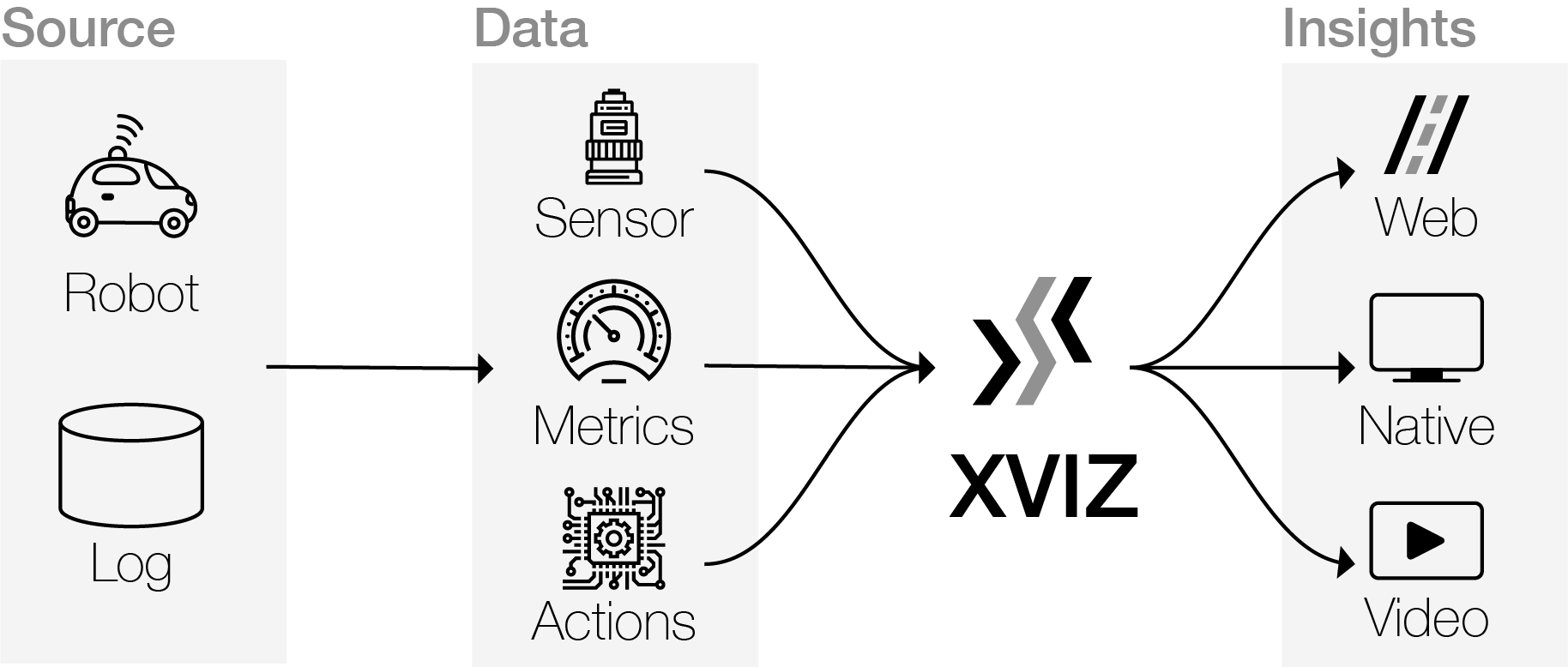
xviz
A protocol for real-time transfer and visualization of autonomy data
direct_lidar_odometry
[IEEE RA-L & ICRA'22] A lightweight and computationally-efficient frontend LiDAR odometry solution with consistent and a
cq-picsearcher-bot
🤖 基于 saucenao / ascii2d / whatanime 的搜图机器人
koide3/direct_visual_lidar_calibration
A toolbox for target-less LiDAR-camera calibration [ROS1/ROS2]
NVlabs/ProtoMotions
ProtoMotions is a GPU-accelerated simulation and learning framework for training physically simulated digital humans and
Nikolay-Kha/PyCNC
Python CNC machine controller for Raspberry Pi and other ARM Linux boards