XVIZ
xviz
机器人
3/5
🧩 软硬件结合
已发布
项目简介
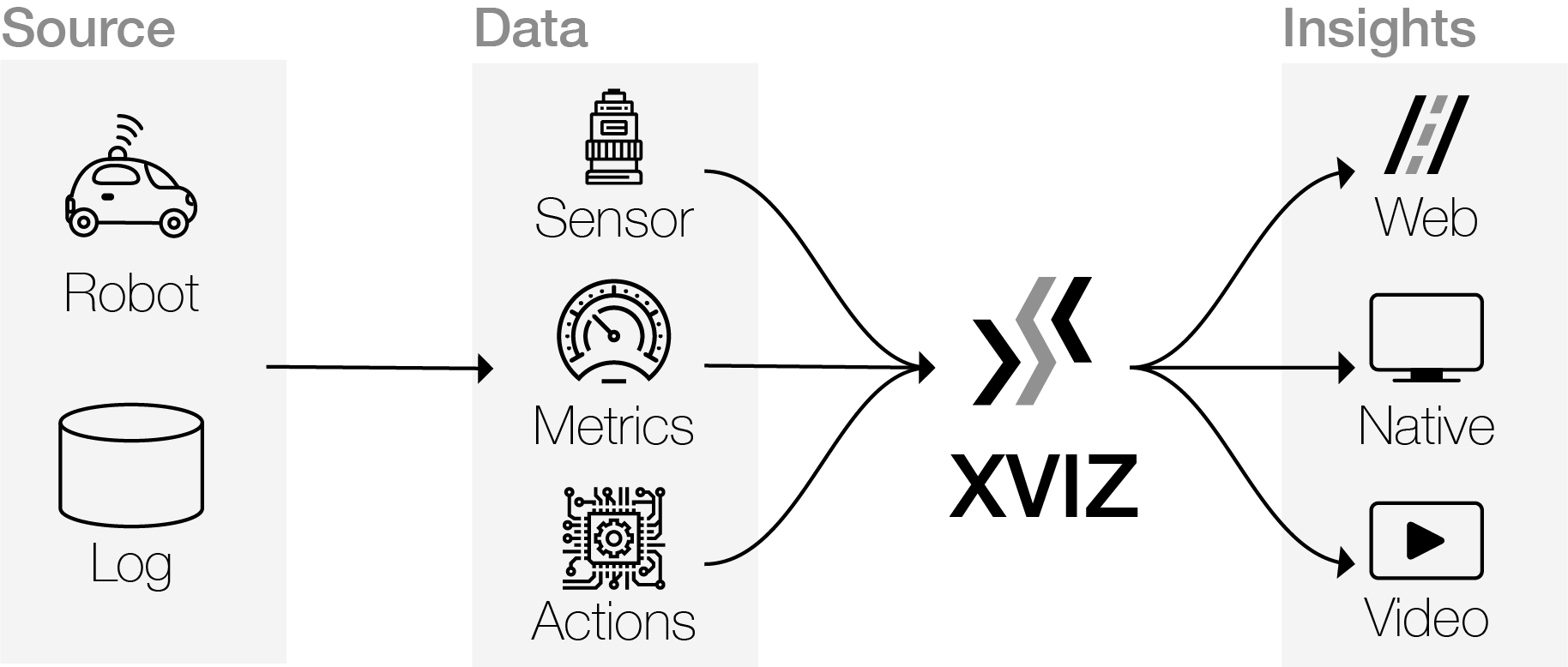
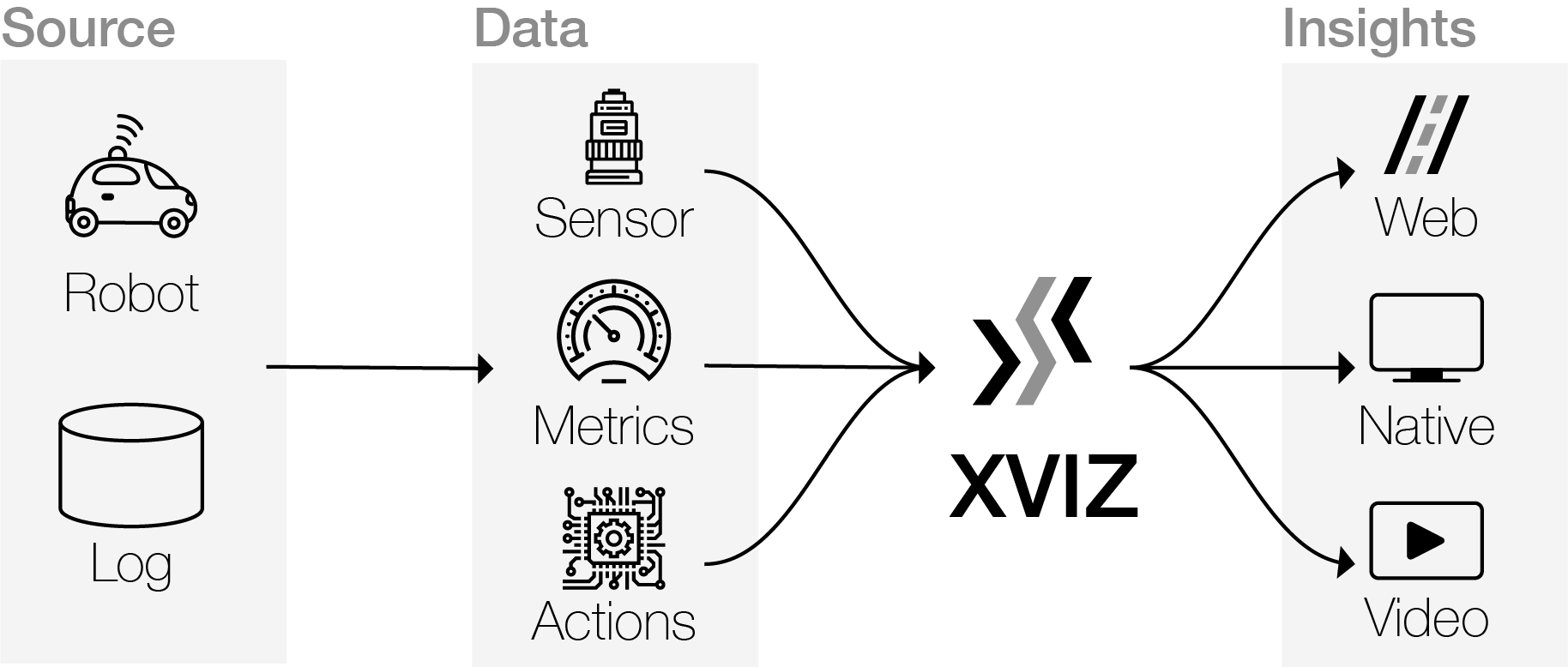
A protocol for real-time transfer and visualization of autonomy data
XVIZ 是由 Uber 开源的一个专为自动驾驶数据实时传输与可视化设计的协议及工具集。该项目旨在解决自动驾驶研发中数据格式不统一、实时性要求高、可视化工具与数据源耦合过深等核心痛点。通过定义一套标准化的数据协议,XVIZ 使得从传感器原始数据到高精度地图、车辆状态、预测轨迹等各类自动驾驶信息,都能以统一、高效的方式在服务器与前端浏览器之间传输和渲染。
标签
项目特点
**实时协议**:专为自动驾驶数据的实时传输和可视化设计,支持流式数据推送
**模块化架构**:提供独立的子模块(builder、parser、server、schema等),可按需使用
**多数据集支持**:内置KITTI、NuScenes等公开数据集的转换示例
**高性能**:采用二进制编码,支持大规模点云数据的高效传输
**完整工具链**:从数据构建、验证、传输到客户端解析的全流程支持
**Web可视化**:与WebGL/Three.js等前端技术结合,实现浏览器端3D可视化
技术规格
| 协议类型 | 实时数据传输协议 |
|---|---|
| 数据格式 | 二进制编码(基于Cap'n Proto) |
| 传输方式 | WebSocket流式传输 |
| 主要语言 | JavaScript/Node.js |
| 运行时 | Node.js 8+ |
| 包管理器 | Yarn |
| 子模块数量 | 6个核心库 + 示例 |
| 许可证 | MIT |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Node.js | 1 | — | 运行时环境 |
| Yarn | 1 | — | 包管理器 |
| jq | 1 | — | 用于pre-commit钩子 |
| KITTI数据集 | 1 | — | 可选,用于示例运行 |
| NuScenes数据集 | 1 | — | 可选,用于示例运行 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 1/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 3/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 4/5
项目图库
所需技能
🔧 **动手能力**:需要配置Node.js开发环境,运行脚本下载和转换数据集,启动服务器和客户端
💻 **编程能力**:需要JavaScript/Node.js编程经验,理解异步编程、WebSocket通信、数据序列化等概念
⚡ **电子电路**:不需要
适用场景
自动驾驶数据可视化和分析平台开发
实时传感器数据流处理和展示系统
自动驾驶算法调试和结果验证工具
大规模点云和图像数据的Web端渲染
自动驾驶数据集格式转换和标准化