Thor 开源机械臂
Thor
机器人
3/5
🧩 软硬件结合
已发布
项目简介
DIY 3D Printable Robotic Arm
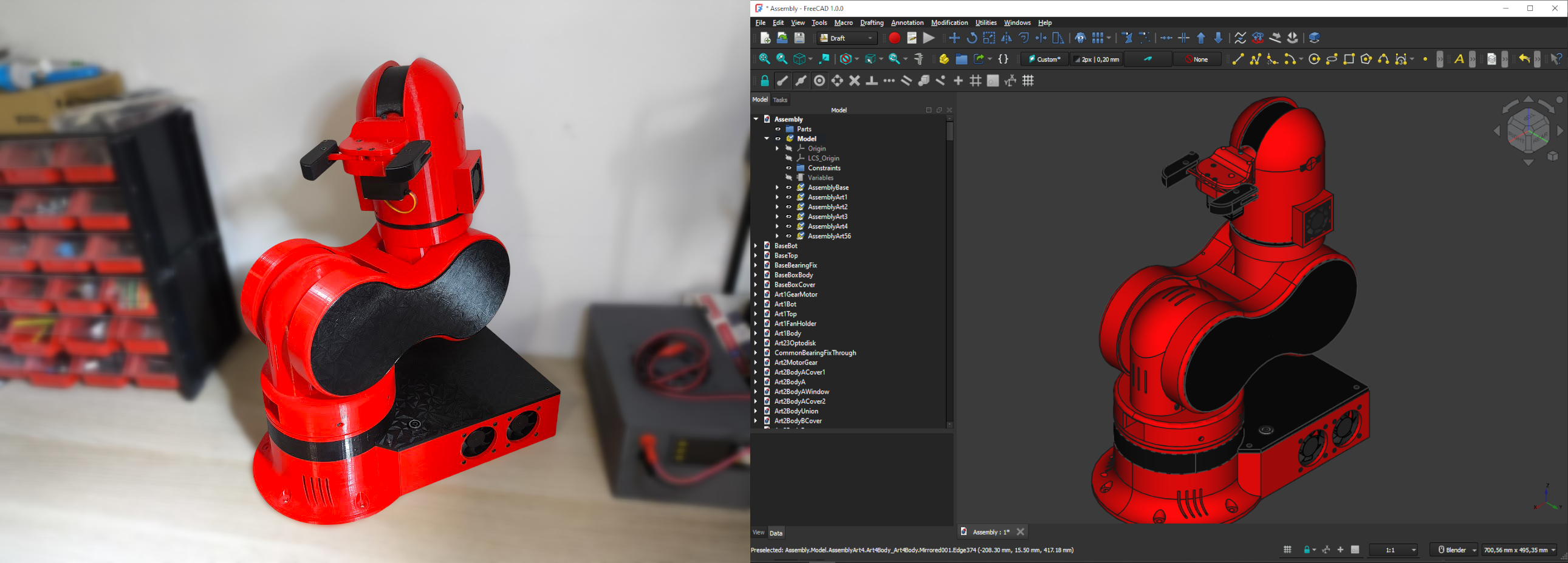
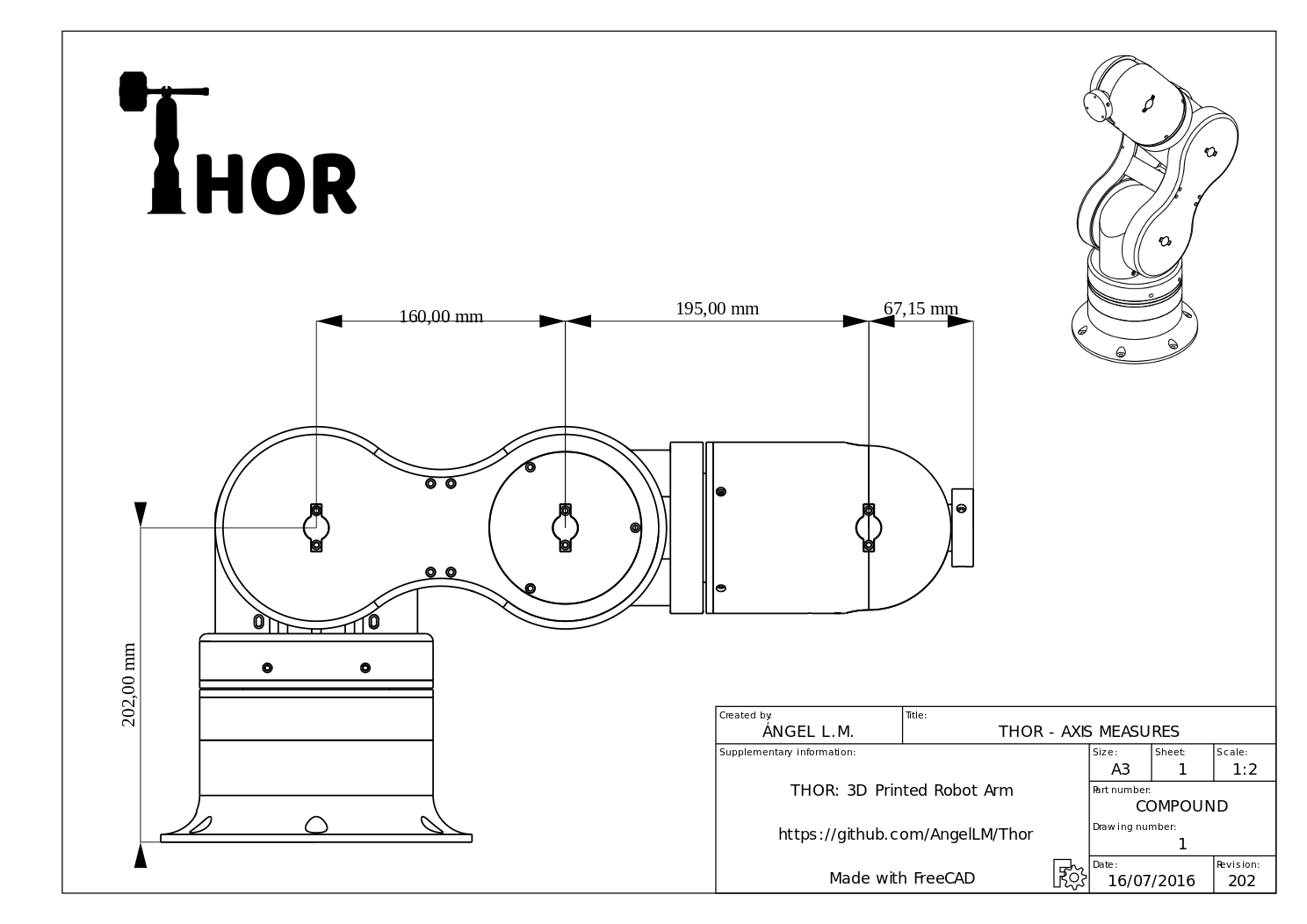
Thor 是一个完全开源、可通过3D打印制造的六自由度机械臂项目,由 AngelLM 社区发起并维护。它的核心目标是让工业级构型的机械臂变得足够亲民——整机硬件成本控制在350欧元以内,高度625毫米,最大有效载荷750克,采用在工业机械臂中常见的偏航-翻滚-翻滚-偏航-翻滚-偏航关节配置,兼顾了运动灵活性与教学代表性。项目从设计到发布全程贯彻开源理念:3D模型使用 FreeCAD 设计,电路板使用 KiCAD 绘制,控制固件兼容 GRBL 和 RepRapFirmware,并提供了基于 Docker 的 ROS2 集成方案,所有源文件均以 CC-BY-SA-4.0 许可公开。Thor 主要解决了教育场景和创客社区中缺乏低成本、可复现、且具备完整文档的机器人教学平台的问题。它特别适合高校和职业学校的机器人课程——学生可以从打印零件开始,经历组装、布线、固件烧录到运动控制的全流程,通过 Asgard 控制软件或 G 代码直接驱动机器人,甚至借助 ROS2 和 MoveIt2 进行高级运动规划。仓库内提供了完整的 STL 打印文件、STEP 格式模型、电路板制造文件以及详细的 BOM 清单和装配视频,社区还设有论坛和 Discord 频道供用户交流改进。对于希望深入理解机器人运动学、嵌入式控制或开源硬件生态的开发者与教育者来说,Thor 是一个理想的实践起点。
标签
项目特点
**全3D打印结构**:所有结构件均可使用 FDM 3D 打印机完成,无需金属加工
**开源硬件与软件**:设计文件(FreeCAD)、固件(Arduino)和控制界面全部开源
**模块化设计**:关节和臂段可拆卸,方便维修、升级或更换部件
**低成本入门**:使用常见的步进电机、驱动板和 Arduino,总物料成本可控
**支持多种控制方式**:可通过串口指令、PC 端 GUI 或手动示教模式操作
**社区活跃**:GitHub 星数超过 1000,有详细的组装指南和调试建议
技术规格
| 自由度 | |
|---|---|
| 最大工作半径 | |
| 负载能力 | |
| 关节驱动 | |
| 控制板 | |
| 驱动模块 | |
| 电源要求 | |
| 通信接口 | |
| 结构材料 | |
| 重量 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D 打印零件(PLA/PETG) | 1 套 | — | 约 20 个独立零件 |
| NEMA 17 步进电机 | 4 | — | 建议 1.2A 以上扭矩 |
| A4988 步进驱动器模块 | 4 | — | 需配散热片 |
| Arduino Mega 2560 | 1 | — | 或兼容克隆版 |
| 12V 5A DC 电源适配器 | 1 | — | 5.5mm 插头 |
| M3 螺丝螺母套装 | 1 套 | — | 约 50 颗,长度 6-20mm |
| 608ZZ 滚珠轴承 | 4 | — | 用于关节旋转 |
| 5mm 转 5mm 弹性联轴器 | 4 | — | 连接电机与关节轴 |
| 杜邦线/排线 | 若干 | — | 用于电机与驱动连线 |
| 内六角扳手(M3) | 1 | — | 组装用 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目文档集中在 GitHub 仓库,需要自行阅读英文指南和代码注释
**动手与操作**:4/5 — 需要 3D 打印、机械组装、接线和调试,动手要求较高
**编程与算法**:3/5 — 需要修改 Arduino 固件和 Processing 控制界面,但基础功能无需深入算法
**设计与建模**:3/5 — 提供 FreeCAD 源文件,可自行修改臂长或关节结构,但需要一定 CAD 基础
**实验与调试**:4/5 — 步进电机抖动、限位校准、负载平衡等问题需要反复调试
**协作与分享**:2/5 — 项目有 GitHub Issues 和社区讨论,但协作流程未专门设计
**学习与研究**:4/5 — 适合学习机器人运动学、步进电机控制、3D 打印结构设计
**系统集成**:3/5 — 可集成摄像头、传感器或 ROS,但需要额外开发
项目图库


所需技能
3D 打印机操作与调平
基础电子电路知识(接线、电源、驱动模块)
Arduino 固件烧录与基础编程(C++)
机械组装与螺丝紧固
使用 FreeCAD 或类似 CAD 软件进行简单修改
串口通信与调试(串口监视器)
基础步进电机控制原理
适用场景
创客空间或 Fab Lab 的机器人入门项目
高校或职业学校的机电一体化课程实验
个人桌面级抓取与搬运演示(如分拣小零件)
机器人爱好者学习运动学与逆运动学
3D 打印技术展示与教学案例
低成本自动化原型验证(如小型拾放操作)