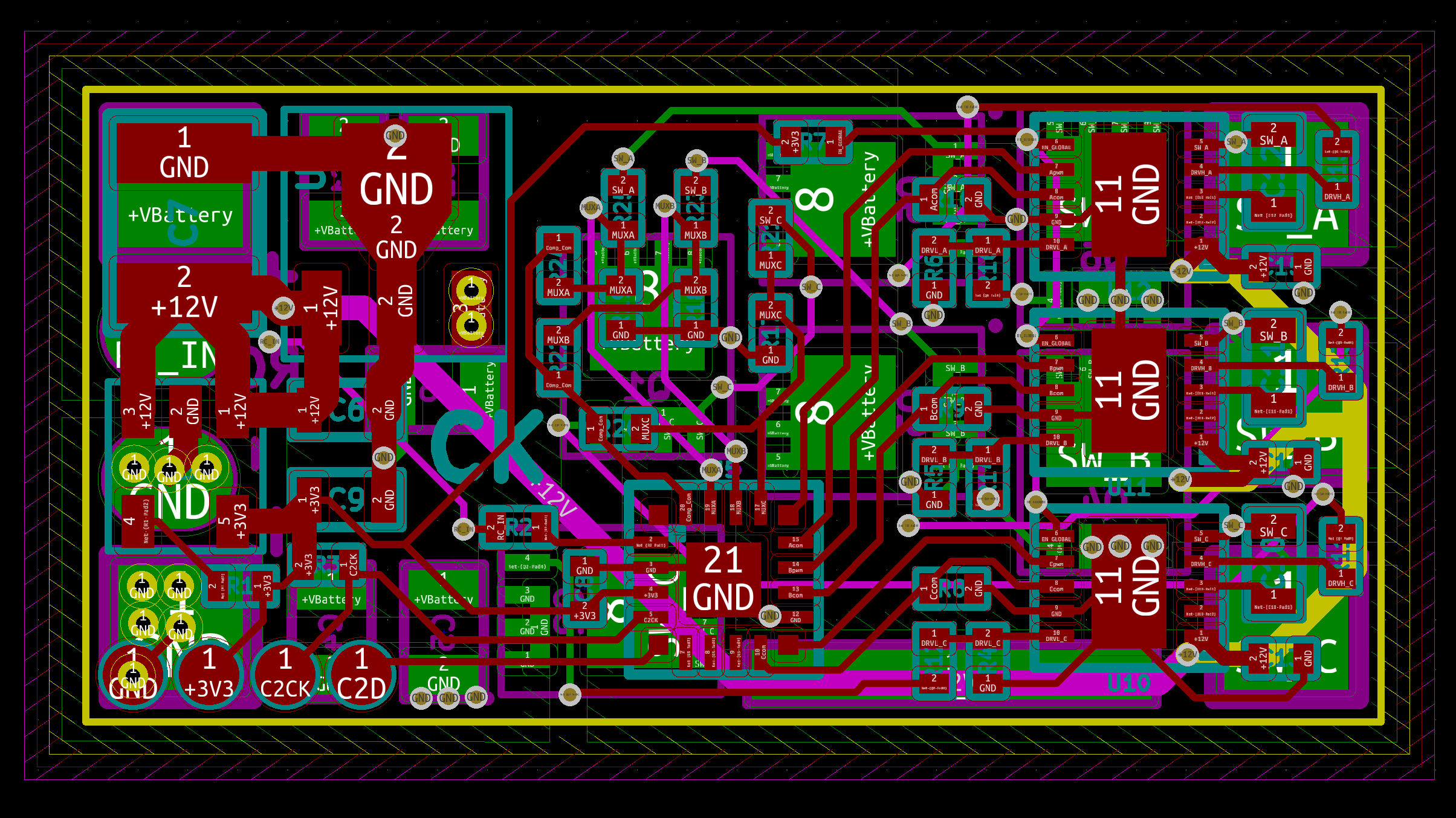
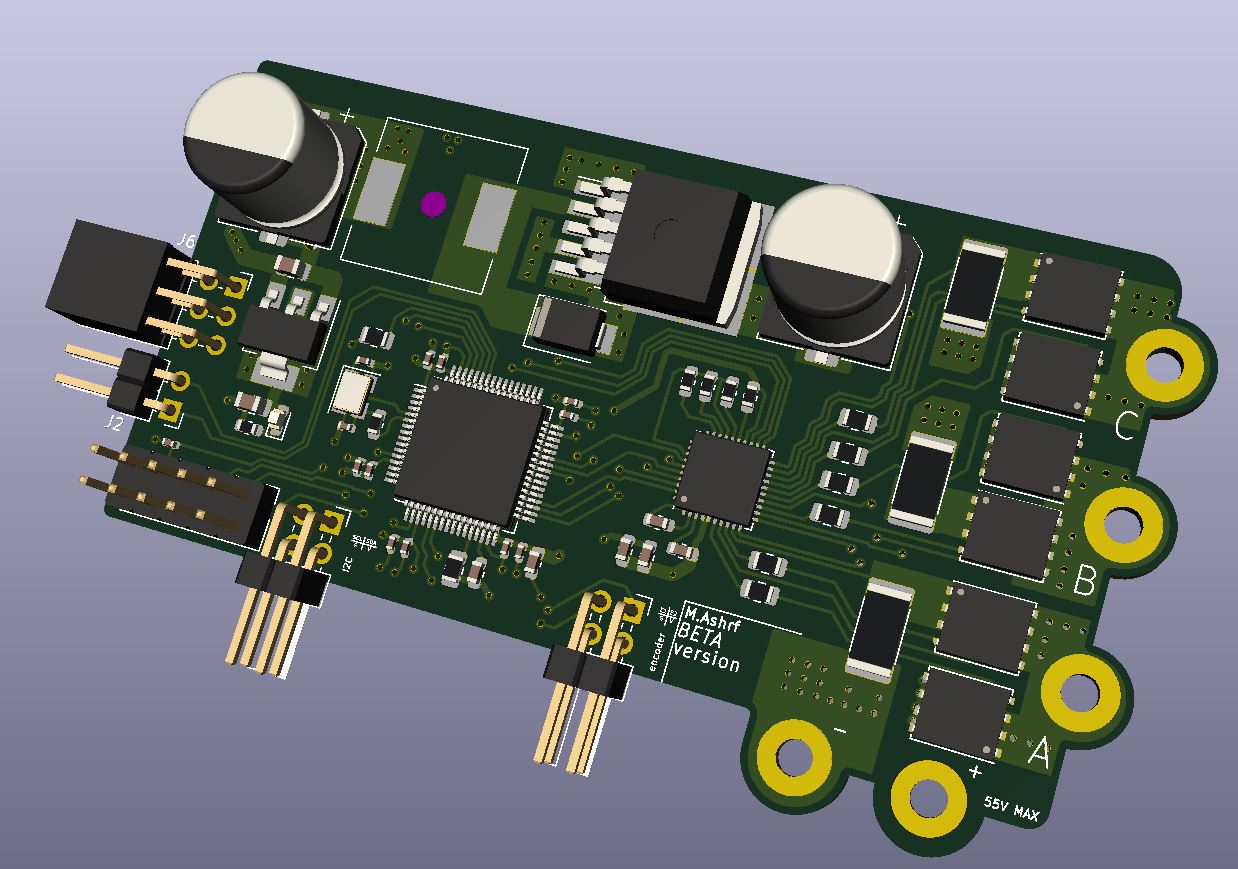
ODesc 4.2 is an open-source motor controller based on the ODrive architecture, designed for high-performance control ofODesc-4.2-Documentation
ODesc 4.2 是基于ODrive架构的开源电机控制器,用于高性能控制。
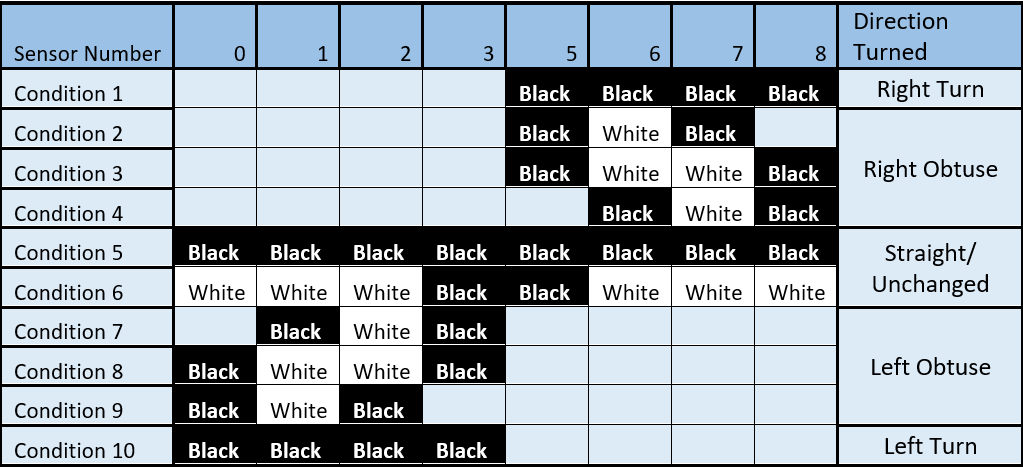
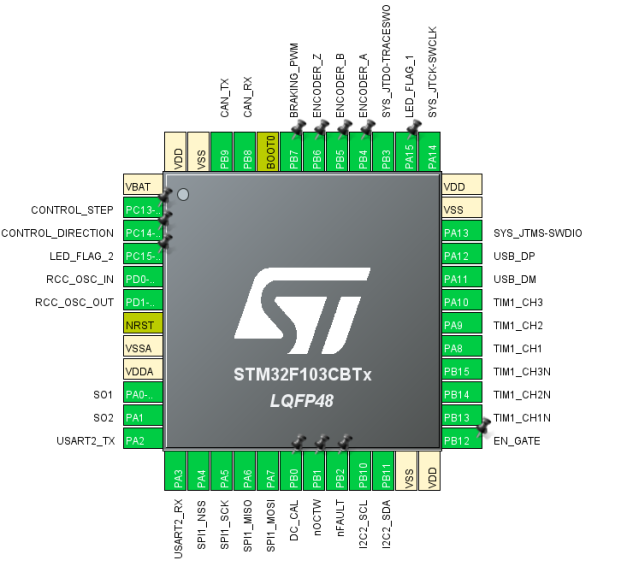
巡线机器人Line-Follower-Robot-LFR
基于Arduino Nano的巡线机器人代码,使用8路QTR传感器和TB6612驱动。
summary: These programs are designed to follow a line using digital or analog line sensors. Microcontroller: Arduino Uno, Iskra UAmperka-MotorShield-or-MotorShieldPlus-line-follower-robot