基于神经网络的自动驾驶机器人
Self-Driving-Robot-Using-Neural-Network
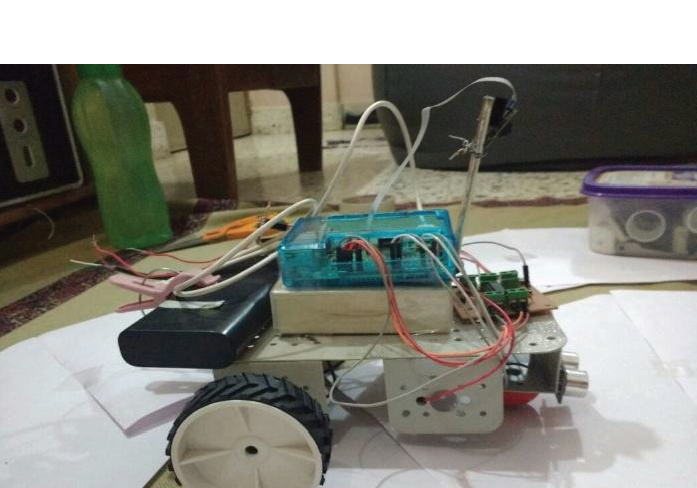
机器人电机驱动板
3/5
🧩 软硬件结合
已发布

项目简介
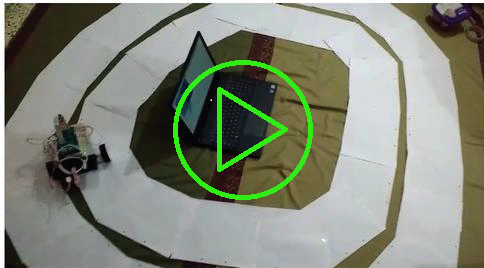
该项目介绍自主机器人,是真实自动驾驶车的缩小版。
这是一个基于神经网络实现自动驾驶小车的开源项目,核心目标是让一辆搭载树莓派的遥控小车具备自主循迹和避障能力。项目巧妙地将人工智能与嵌入式硬件结合,通过模仿人类大脑的学习方式,使小车能够从图像中学习并做出驾驶决策。
标签
项目特点
使用神经网络模型学习赛道图像,实现类人决策
基于Raspberry Pi + Pi Camera进行实时视频流传输
通过笔记本电脑进行模型训练与预测(利用更大内存和灵活性)
集成超声波传感器,实现障碍物检测与避障
支持键盘遥控采集训练数据(w前进,a左转,d右转)
完整的客户端-服务器架构(Raspberry Pi与PC通信)
技术规格
| 主控制器 | Raspberry Pi 3 |
|---|---|
| 摄像头 | Raspberry Pi Camera |
| 传感器 | 超声波传感器(HC-SR04) |
| 电机驱动 | L293D |
| 底盘 | 4轮2驱机器人底盘 |
| 编程语言 | Python 2.7 |
| 深度学习框架 | TensorFlow |
| 计算机视觉库 | OpenCV |
| 控制库 | Pygame |
| 数据格式 | NumPy数组 |
| 通信方式 | TCP Socket(同一网络) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Raspberry Pi 3 | 1 | — | 核心计算单元 |
| Pi Camera | 1 | — | 实时图像采集 |
| 超声波传感器 (HC-SR04) | 1 | — | 障碍物检测 |
| L293D | 1 | — | 电机控制 |
| 4轮2驱机器人底盘 | 1 | — | 含2个电机 |
| 标准机器人轮 | 4 | — | 含在底盘套件中 |
| 移动电源或电池组 | 1 | — | 为Raspberry Pi供电 |
| 杜邦线若干 | 1套 | — | 电路连接 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库




所需技能
🔧 **动手能力**:需要组装机器人底盘、连接Raspberry Pi与电机驱动、超声波传感器等硬件,具备基本电路连接能力。
💻 **编程能力**:需要Python编程基础,理解TensorFlow神经网络训练流程、OpenCV图像处理、Socket网络编程以及Pygame键盘控制。
⚡ **电子电路**:需要了解Raspberry Pi GPIO引脚、L293D电机驱动原理、超声波传感器接线与工作原理。
适用场景
机器人爱好者学习自动驾驶原理的实践项目
高校人工智能/机器人课程的教学实验
基于深度学习的嵌入式视觉导航研究原型
缩比自动驾驶算法验证与测试平台