8路红外阵列传感器循迹小车
Line-Follower-robot-with-8-IR-array-sensors
机器人电机驱动板
3/5
🧩 软硬件结合
已发布
项目简介
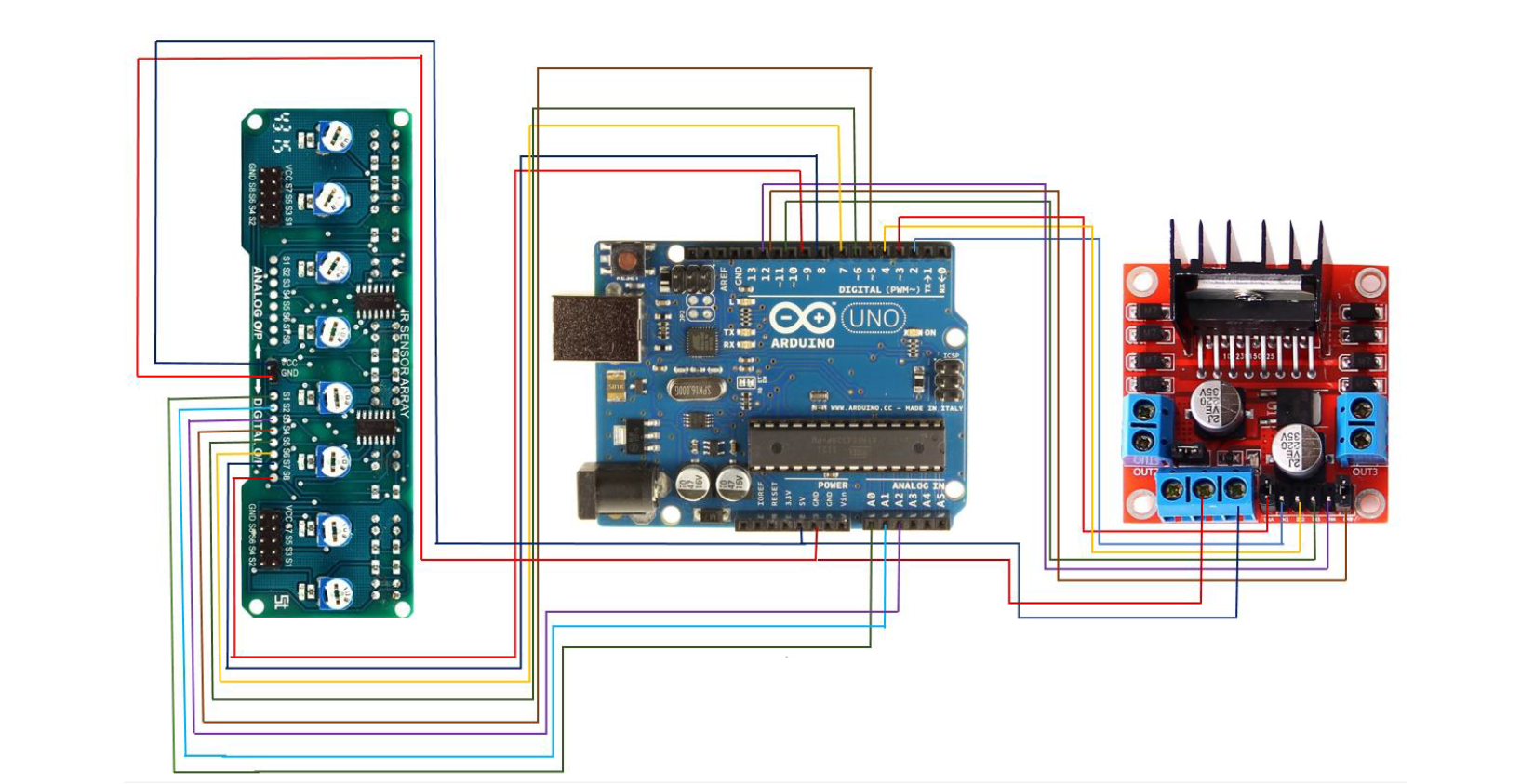
8阵列传感器+Arduino-UNO+L298-N驱动,8传感器性能优于
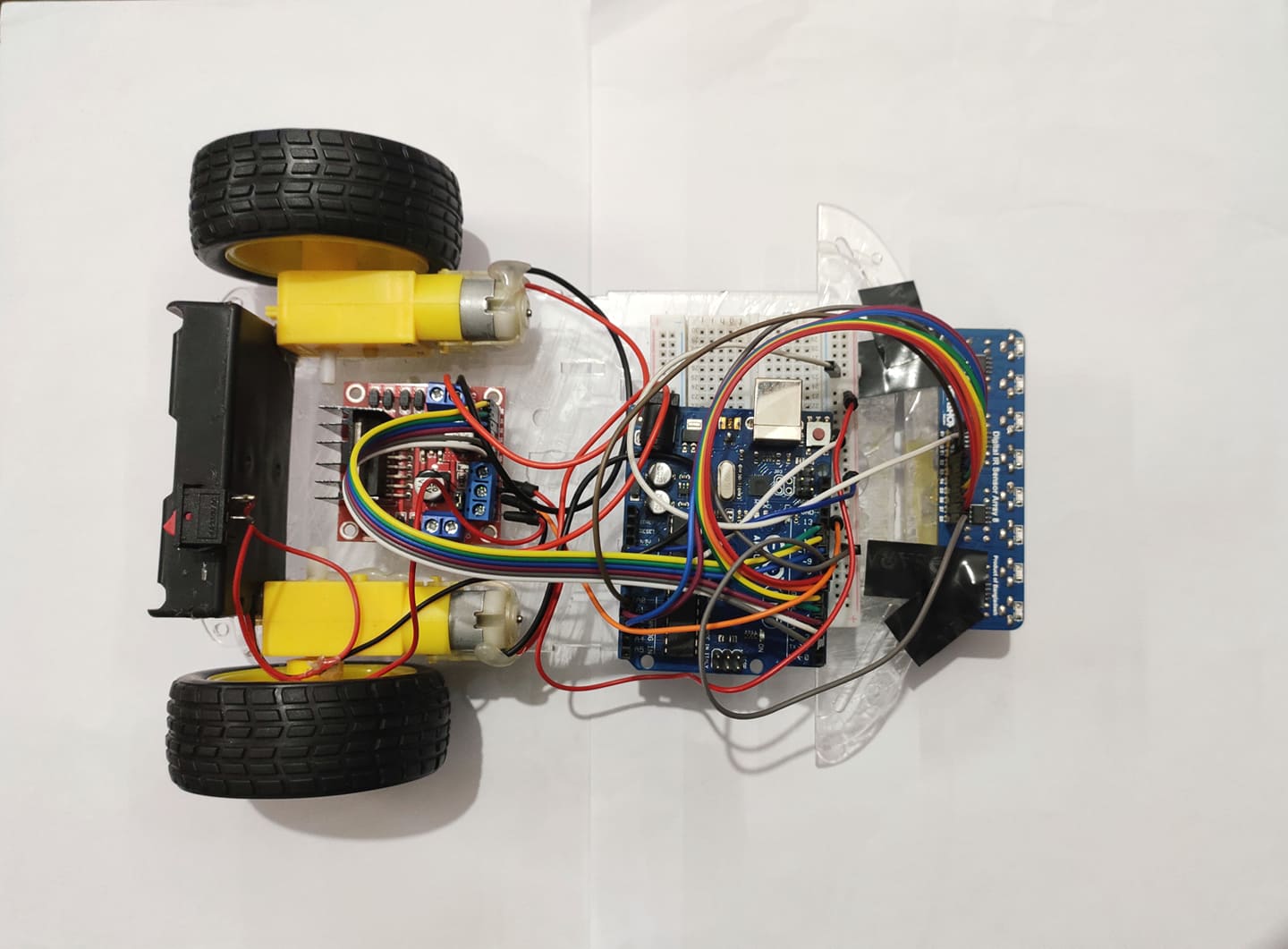
这是一个基于Arduino UNO开发的智能巡线机器人项目,核心硬件包括8路红外阵列传感器、L298N电机驱动模块和Arduino主控板。与常见的3传感器巡线方案不同,这款机器人配备了8个红外传感器,能够更精确地检测地面黑线的位置变化。当机器人沿着黑色轨迹行驶时,8个传感器会实时采集地面反射信号,通过算法判断机器人相对于黑线的偏移量,从而控制左右电机的转速差,实现精准的循迹行驶。
标签
项目特点
使用8路红外阵列传感器,循迹精度高,能应对复杂线路
基于Arduino UNO控制,编程简单,易于修改和扩展
采用L298N电机驱动模块,驱动能力强,支持直流电机正反转
到达线路终点自动停止,闭环线路可持续跟随
硬件成本低,适合初学者动手制作
技术规格
| 主控板 | Arduino UNO |
|---|---|
| 传感器 | 8路红外反射式阵列传感器 |
| 电机驱动 | L298N 双H桥直流电机驱动模块 |
| 循迹方式 | 黑线检测(高反射/低反射) |
| 供电方式 | 7-12V直流电源(如18650电池组或适配器) |
| 适用场景 | 直线、弯道、十字路口等黑线路径 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Arduino UNO | 1 | — | 兼容板亦可 |
| 8路红外阵列传感器模块 | 1 | — | 如TCRT5000阵列 |
| L298N电机驱动模块 | 1 | — | 含散热片 |
| 直流减速电机(带轮) | 2 | — | 如TT电机 |
| 亚克力或塑料小车底盘 | 1 | — | 含万向轮 |
| 18650锂电池(或7.4V锂电池组) | 2 | — | 或使用9V电池盒 |
| 杜邦线(公对公/公对母) | 若干 | — | 用于电路连接 |
| 开关、面包板、螺丝螺母 | 若干 | — | 固定和供电 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 2/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 2/5
⚪ 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
⚪ 创造与创新: 2/5
项目图库

所需技能
🔧 **动手能力**:能够组装小车底盘、连接杜邦线、固定传感器和驱动模块。
💻 **编程能力**:了解Arduino IDE基本使用,能够编写简单的传感器读取和电机控制逻辑(PID或阈值判断)。
⚡ **电子电路**:理解红外传感器、电机驱动模块的接线方式,知道如何为Arduino和电机分别供电。
适用场景
机器人入门教学项目,学习传感器与电机控制
学校科技节或创客比赛中的循迹挑战
作为更复杂机器人(如迷宫求解、巡线搬运)的基础平台