搜索 "ROS2" 找到 27 个结果
Autoware是全球领先的自动驾驶开源软件项目。
ROS 2导航框架与系统
A ROS/ROS2 Multi-robot Simulator for Autonomous Vehicles
Code and model to control the AH!
A toolbox for target-less LiDAR-camera calibration [ROS1/ROS2]
Precise localization based on GNSS and IMU.
ROS2编写的F1TENTH自主赛车仓库,代码支持实体运行。
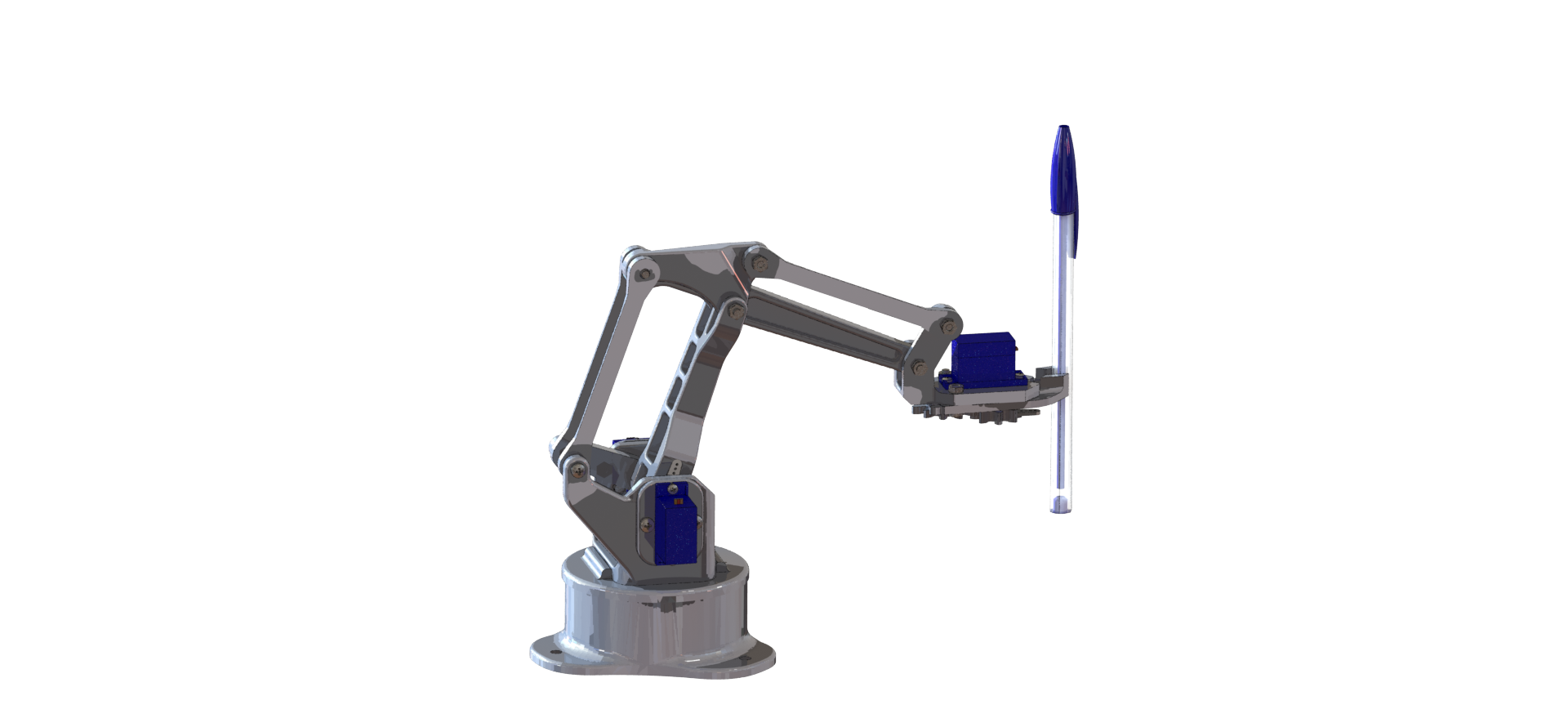
ROS Packages for Interbotix Arms
Core ROS Packages for Interbotix Robots
Doosan robotic arm, simulation, control, visualization in Gazebo and ROS2 for Reinforcement Learning.
ROS2 based custom robotic arm with ros2_control
A 3D Printed Quadrupedal Robot for Locomotion Research. :turtle:
Lightweight interface for controlling ROS-based robotic arms using LeRobot
Arduinobot是开源3D打印机械臂,由ROS 2驱动,设计简单成本低。
ROS2适配DJI Robomaster EP和S1。
BDX-R is an open, community-driven biped platform focused on practical robot learning and reproducible sim-to-real transfer.
Build instructions and code documentation for the Stanford Pupper project.
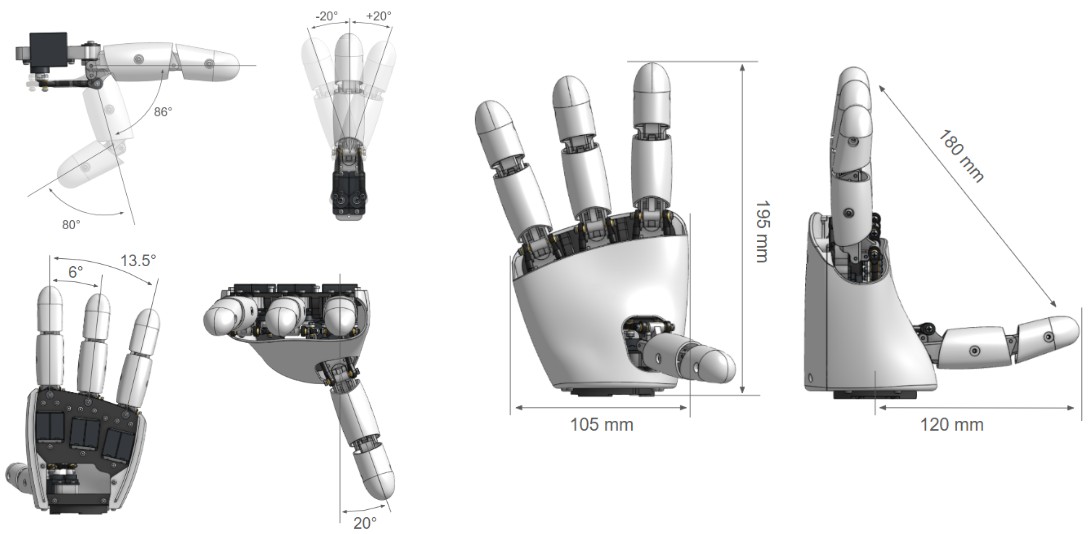
Mechanical, BOM, and Instructional Materials for Building the DexHand Open Source Dexterous Humanoid Robot Hand
实现moveit驱动panthera机械臂 实现了机械臂笛卡尔空间阻抗控制
DumBot13开源3D打印人形机器人,21/23DOF,成本¥18,000内。