待补充
Interbotix/interbotix_ros_manipulators
机器人
4/5
🧩 软硬件结合
已发布

项目简介
ROS Packages for Interbotix Arms
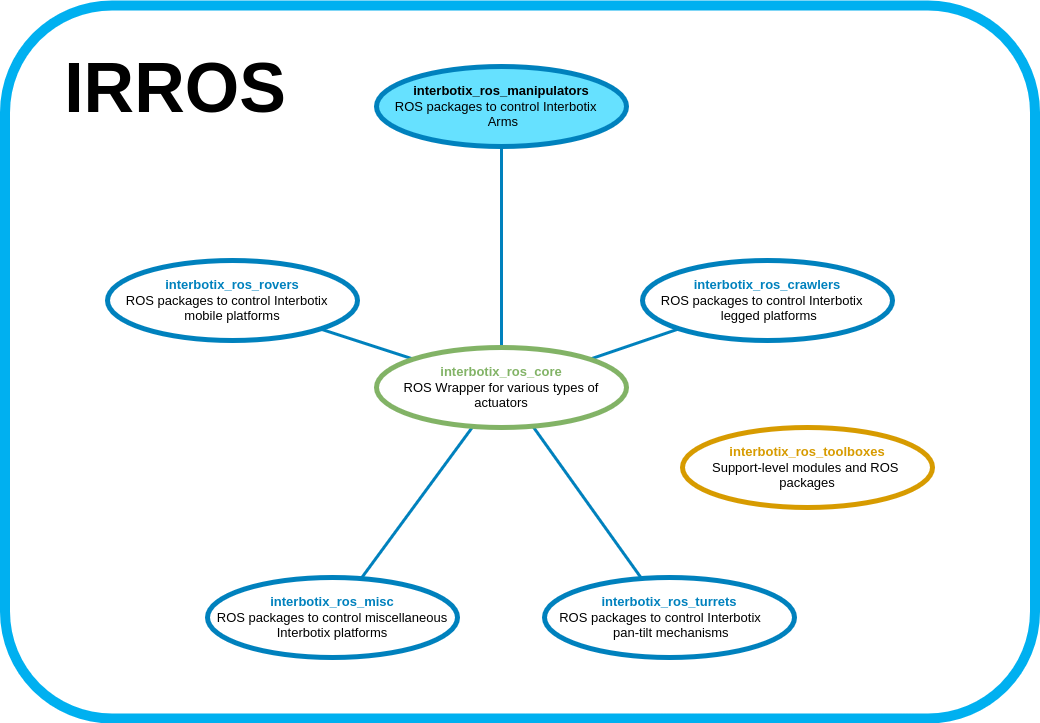
Interbotix/interbotix_ros_manipulators 是一个专为 Trossen Robotics 旗下各类机械臂产品设计的 ROS 控制仓库。该项目基于 interbotix_ros_core 提供的底层驱动节点,并配合 interbotix_ros_toolboxes 中的工具包,构建了一套完整、易用的机械臂控制生态。其核心功能涵盖了从物理臂控制、MoveIt 运动规划、Gazebo 仿真到 ROS Control 集成等关键环节,同时提供了丰富的演示包和脚本,帮助用户快速上手。项目技术栈以 ROS 1 Noetic 和 ROS 2 Galactic、Humble、Rolling 为主,支持多种 Dynamixel X 系列舵机驱动的机械臂,并通过 URDF 模型和网格文件实现 RViz 中的可视化。该仓库解决了研究人员和开发者在使用不同型号、不同自由度机械臂时面临的配置复杂、接口不统一的问题,尤其适合需要快速搭建机械臂控制原型、进行运动规划算法验证或开展机器人教学实验的场景。通过将底层 ROS 代码抽象为易用的 Python 和 MATLAB 接口,即使是缺乏 ROS 经验的用户也能像操作普通对象一样控制机械臂,大幅降低了开发门槛。项目结构清晰,按机械臂类型组织核心包和示例包,并鼓励社区贡献,未来还将持续扩展支持更多类型的机械臂。
标签
项目特点
支持多款 Trossen Robotics 机械臂(WidowX、Reach、PincherX 等),统一控制接口
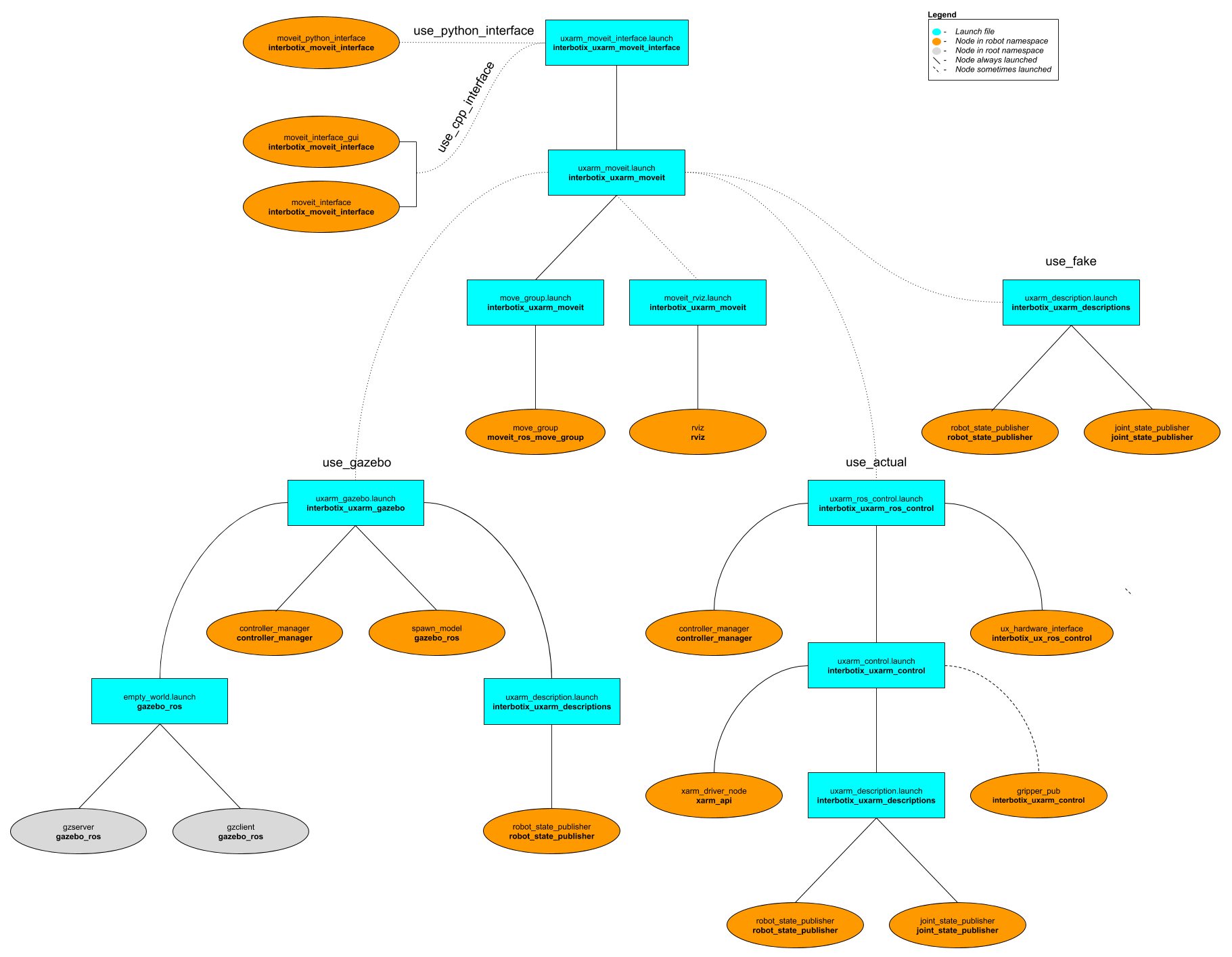
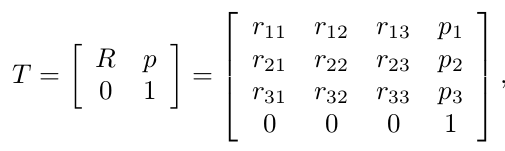
集成 MoveIt 运动规划,支持正逆运动学、路径规划与碰撞检测
提供 Gazebo 仿真环境,无需真实硬件即可调试算法
兼容 ROS 1 Noetic 和 ROS 2 Galactic、Humble,覆盖主流 ROS 版本
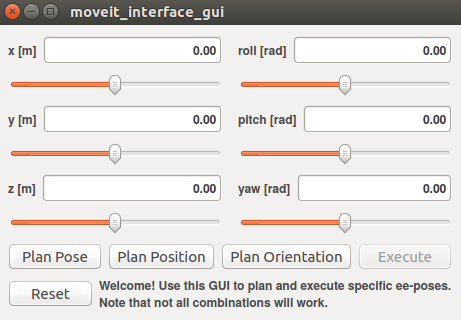
包含丰富的演示脚本(如关节控制、末端执行器控制、轨迹录制回放)
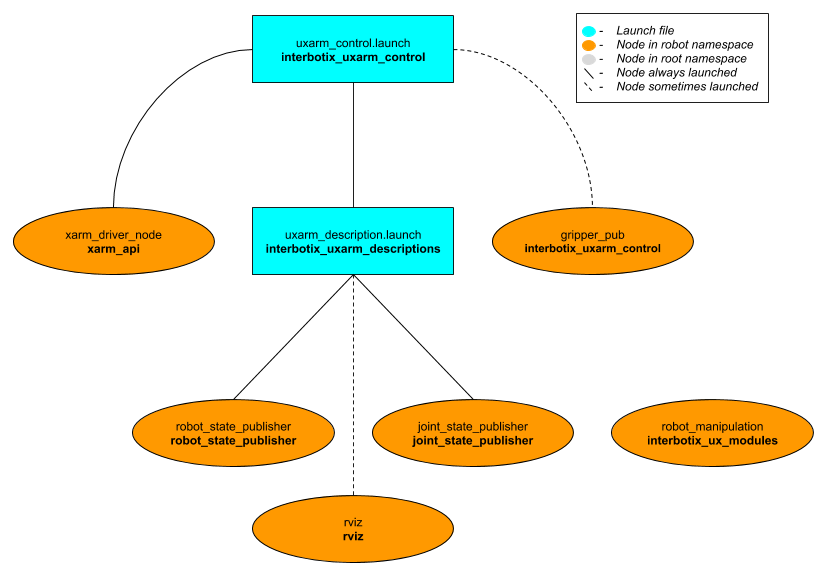
模块化架构,易于扩展自定义机械臂或传感器
技术规格
| 支持 ROS 版本 | ROS 1 Noetic / ROS 2 Galactic / ROS 2 Humble |
|---|---|
| 支持机械臂型号 | WidowX-200/250/250S, WidowX-300, WidowX-300S, PincherX-100/150, ReachX-200, RX-200, RX-150, VX-300S 等 |
| 底层通信 | Dynamixel SDK (USB2Dynamixel / U2D2) |
| 运动规划 | MoveIt (OMPL / CHOMP / STOMP) |
| 仿真环境 | Gazebo (ROS 1) / Ignition Gazebo (ROS 2) |
| 控制接口 | ROS Control (JointTrajectoryController / PositionController) |
| 编程语言 | C++ (节点) + Python (脚本/演示) |
| 操作系统 | Ubuntu 20.04 (Noetic) / Ubuntu 22.04 (Humble) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Trossen Robotics 机械臂(如 WidowX-250) | 1 | — | 用户自选型号 |
| USB2Dynamixel 或 U2D2 适配器 | 1 | — | 用于 PC 与机械臂通信 |
| 12V 电源适配器(含插头) | 1 | — | 随机械臂附赠 |
| Ubuntu 20.04 / 22.04 | 1 | — | 操作系统 |
| ROS 1 Noetic 或 ROS 2 Humble | 1 | — | 按需安装 |
| interbotix_ros_core | 1 | — | 底层驱动包 |
| interbotix_ros_toolboxes | 1 | — | 工具包集合 |
| interbotix_ros_manipulators | 1 | — | 本仓库 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识库或检索能力,但文档清晰,可快速查阅参数。
**动手与操作**:4/5 — 需要连接硬件、配置串口、调试机械臂,动手要求较高。
**编程与算法**:3/5 — 主要使用 ROS 标准接口,少量自定义节点需要 C++/Python 编程。
**设计与建模**:2/5 — 不涉及机械设计,但支持在 URDF 层面修改模型参数。
**实验与调试**:4/5 — 提供仿真和真实硬件两种调试模式,支持轨迹录制与回放。
**协作与分享**:3/5 — 开源项目,可通过 GitHub Issue/PR 协作,社区活跃。
**学习与研究**:4/5 — 适合学习 ROS 控制、MoveIt 规划、机械臂运动学等。
**系统集成**:4/5 — 可集成视觉、力传感器、末端执行器,扩展性强。
项目图库

所需技能
熟悉 ROS 1 或 ROS 2 基本概念(节点、话题、服务、动作)
掌握 Linux 命令行操作(Ubuntu)
具备 C++ 或 Python 基础编程能力
了解机械臂运动学(正逆解)基本概念
能够连接串口设备并配置权限
会使用 Git 进行版本管理
适用场景
高校机器人课程教学与实验(如运动学、轨迹规划)
科研机构进行机械臂控制算法验证
创客/开发者搭建桌面机械臂原型
工业场景中的轻量级拾放、分拣任务
机器人竞赛(如 RoboMaster、ICRA 挑战赛)中的机械臂控制
远程实验室或仿真教学平台部署