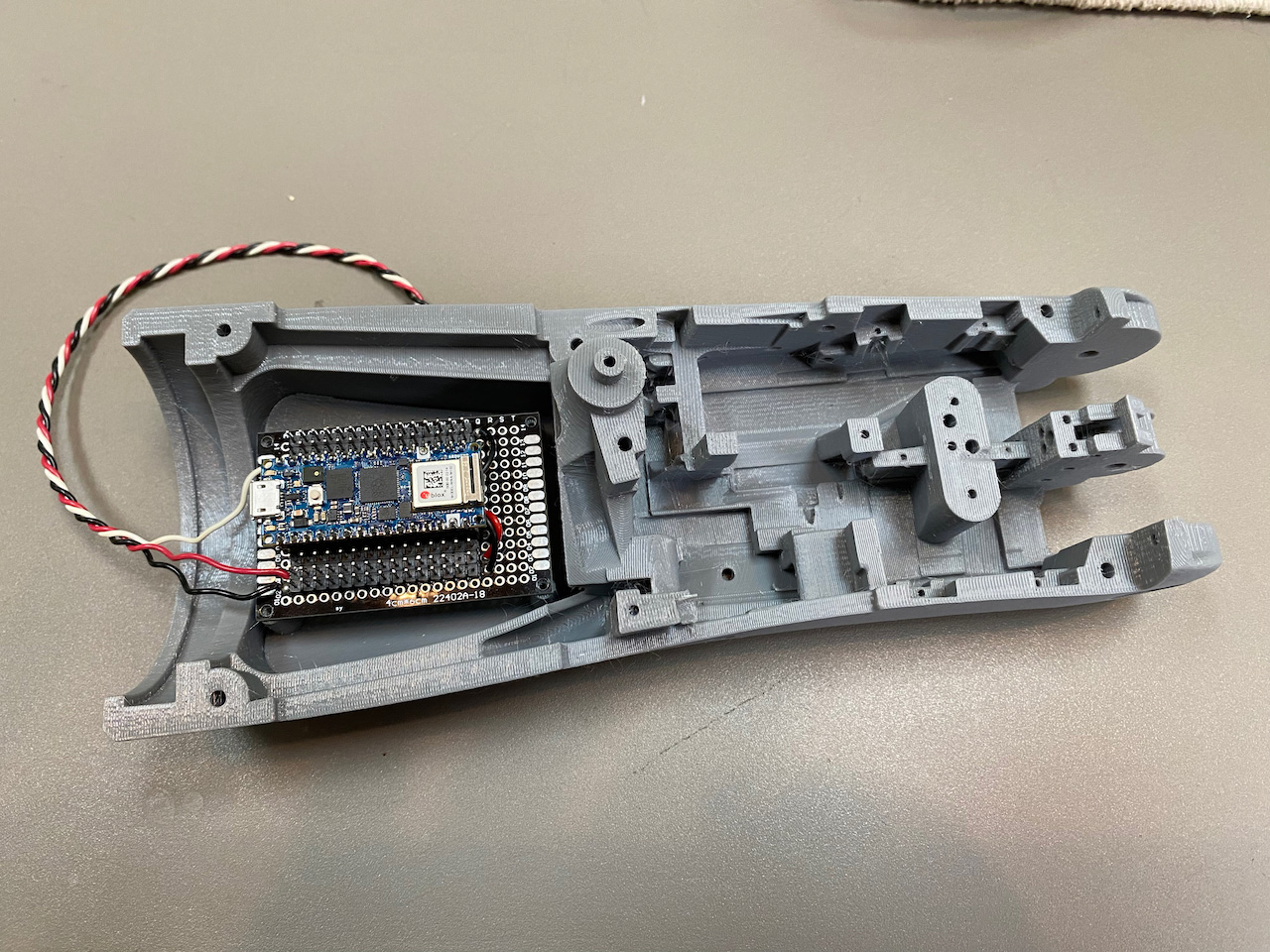
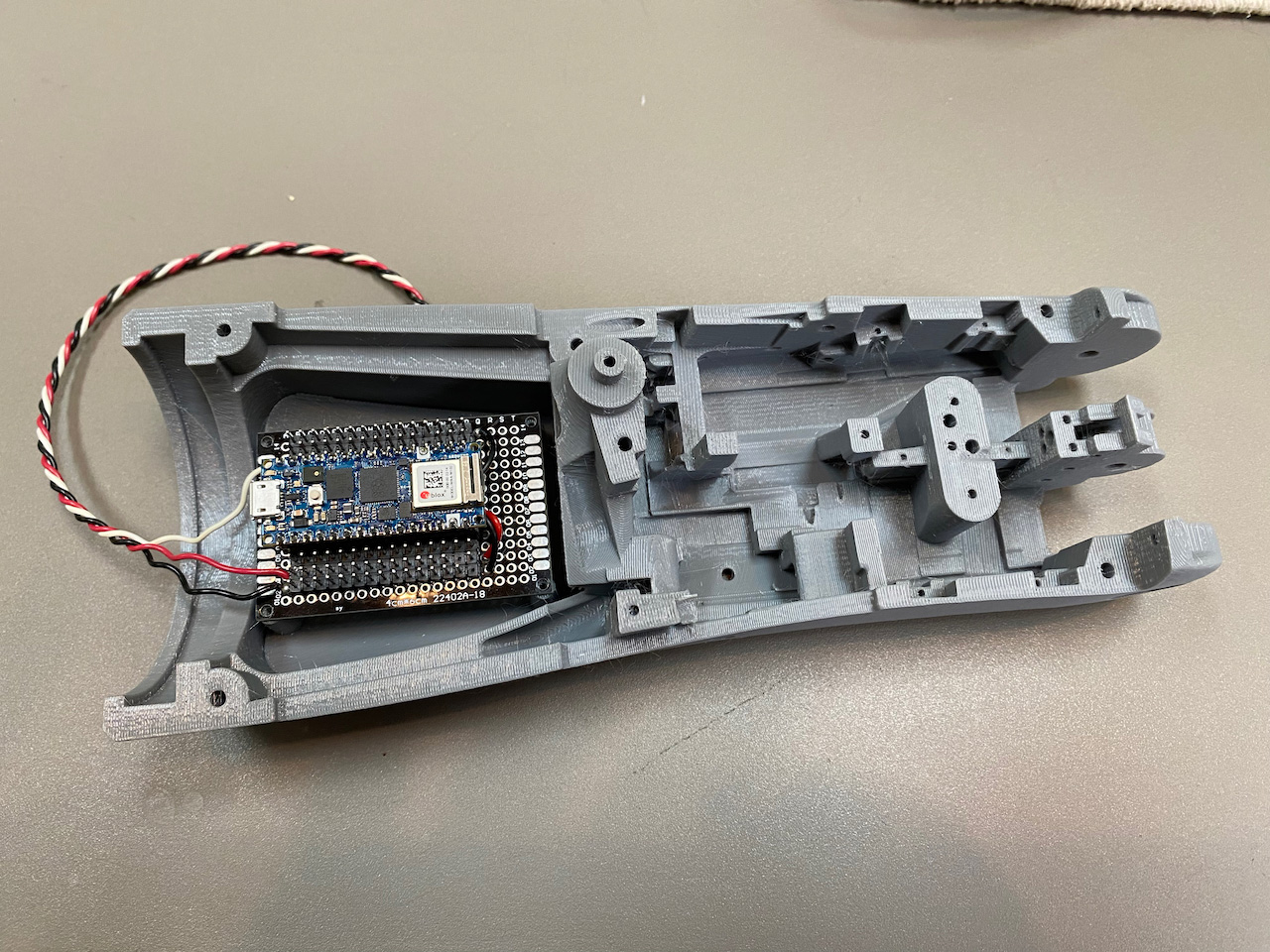
Mechanical, BOM, and Instructional Materials for Building the DexHand Open Source Dexterous Humanoid Robot Hand
dexhand-mechanical-build
假手/灵巧手
3/5
假手/灵巧手
已发布
项目简介
Mechanical, BOM, and Instructional Materials for Building the DexHand Open Source Dexterous Humanoid Robot Hand
标签
项目特点
5指独立控制,具备仿人灵巧抓取能力
基于ROS2的完整软件栈,易于集成到机器人系统
所有机械零件均可3D打印,成本远低于商业灵巧手
提供详细的BOM清单、装配图和分步教程,降低搭建门槛
开源许可证,允许自由修改和商用
社区活跃,持续更新改进
技术规格
| 手指数量 | 5(拇指+4指) |
|---|---|
| 自由度 | 每个手指1个自由度(弯曲),拇指额外1个侧摆自由度 |
| 驱动方式 | 舵机线缆驱动 |
| 控制接口 | ROS2 |
| 结构材料 | 3D打印(推荐PLA/PETG) |
| 电源要求 | 5V/6V(根据舵机型号) |
| 整手重量 | 约300-400g(取决于打印材料) |
| 尺寸 | 约成人手掌大小 |
| 开源协议 | 开源(具体见仓库LICENSE) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印手指零件 | 1套 | — | 5指全套STL文件 |
| 3D打印手掌零件 | 1套 | — | 包含掌心和掌背 |
| 3D打印腕部连接件 | 1个 | — | 用于连接手臂 |
| 微型舵机 | 6个 | — | 推荐SG90或MG90S |
| 钓鱼线/尼龙线 | 若干 | — | 用于手指弯曲传动 |
| 弹簧 | 若干 | — | 用于手指回弹复位 |
| M2/M3螺丝螺母 | 1套 | — | 具体规格见BOM文档 |
| 热熔嵌件 | 若干 | — | 用于塑料件螺纹加固 |
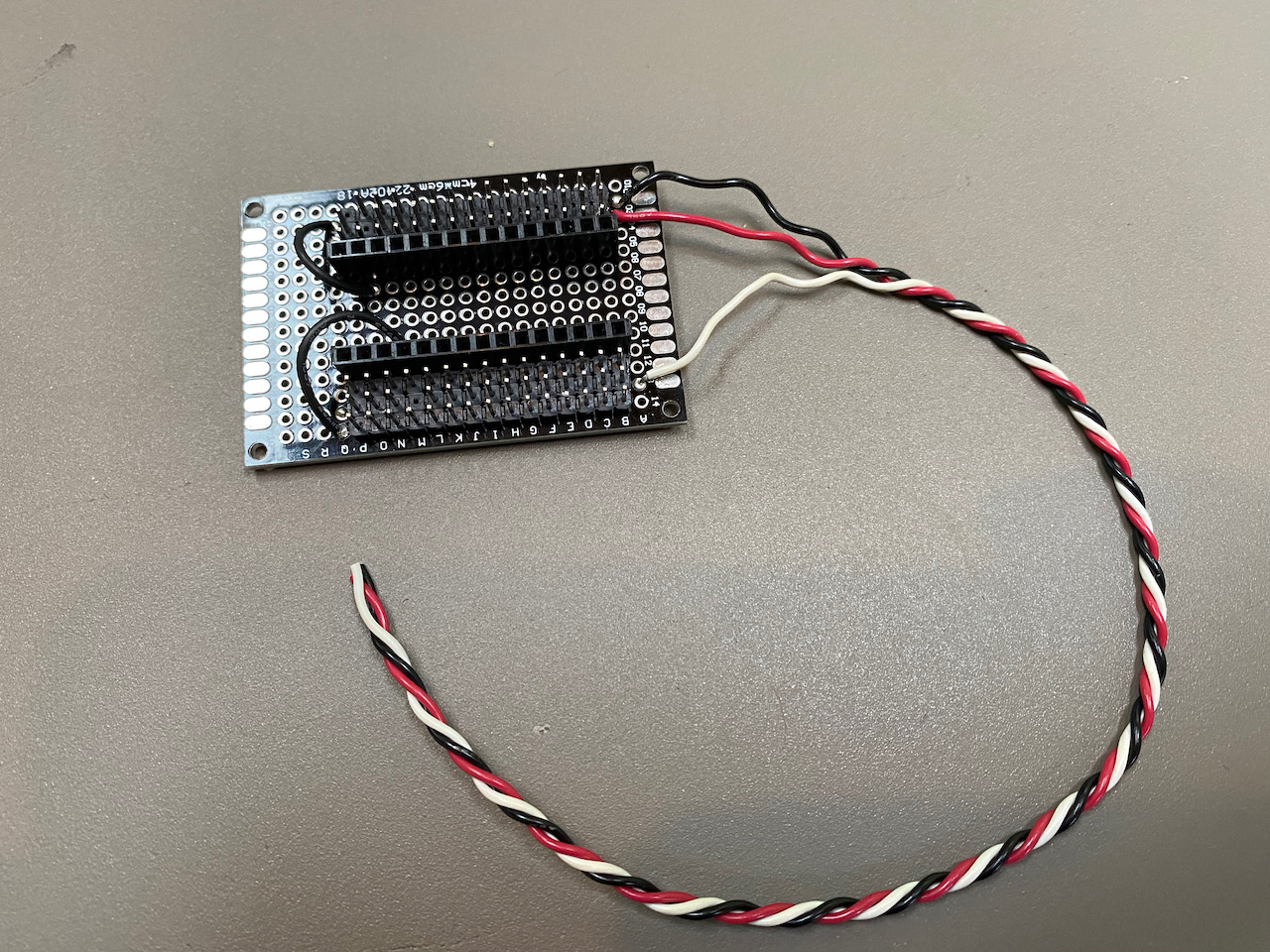
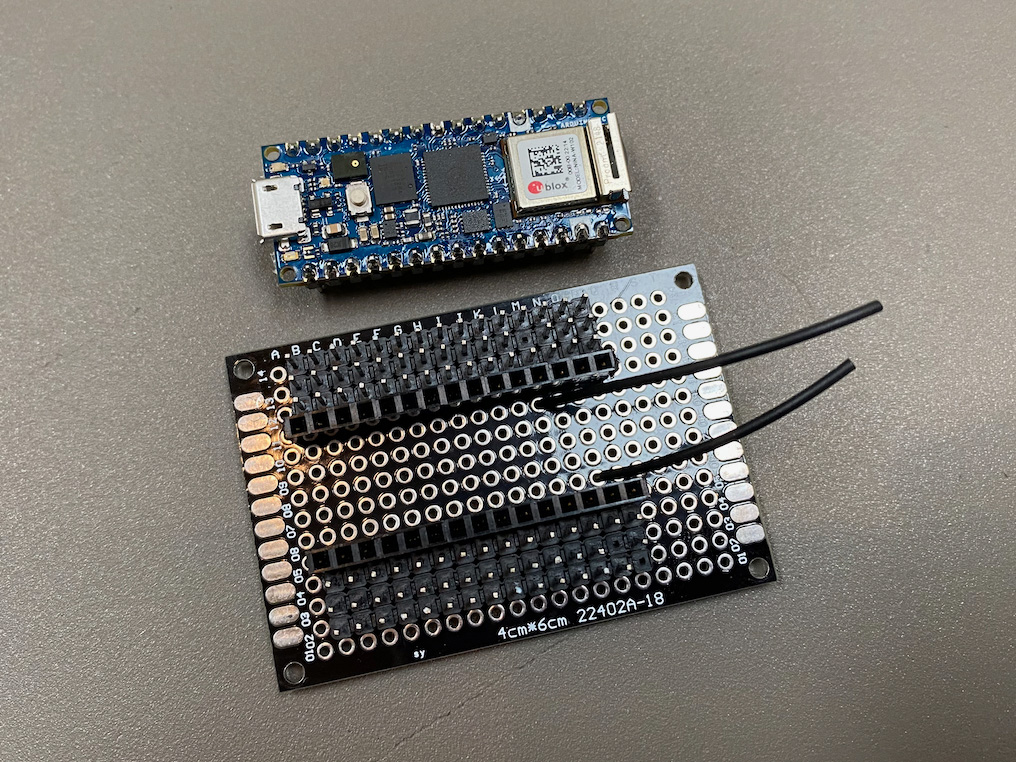
| 舵机控制板 | 1块 | — | 推荐PCA9685或类似 |
| 连接线 | 若干 | — | 杜邦线/排线 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 需要查阅BOM和装配文档,但信息量不大
**动手与操作**:4/5 — 需要精细的手工操作,包括穿线、安装微型螺丝和舵机
**编程与算法**:2/5 — 基础ROS2节点配置,无需复杂算法
**设计与建模**:2/5 — 直接使用提供的STL文件,无需自行建模
**实验与调试**:3/5 — 需要调试舵机角度和线缆张力,确保手指动作协调
**协作与分享**:3/5 — 可参与社区讨论,分享改进方案
**学习与研究**:3/5 — 适合学习灵巧手机构原理和ROS2控制
**系统集成**:3/5 — 可集成到ROS2机器人系统中,需要一定系统思维
项目图库


所需技能
基础手工工具使用(螺丝刀、钳子、镊子)
3D打印机操作和切片软件使用
基础电子知识(舵机接线、供电)
基础ROS2操作(节点启动、话题发布)
耐心和细致的手工能力
适用场景
机器人灵巧操作研究
假肢/义手原型开发
机器人竞赛和创客项目
高校机器人课程教学
开源硬件爱好者DIY项目
低成本仿人机械手方案验证