AmazingHand 开源灵巧手
AmazingHand
机器人
4/5
🧩 软硬件结合
已发布

项目简介
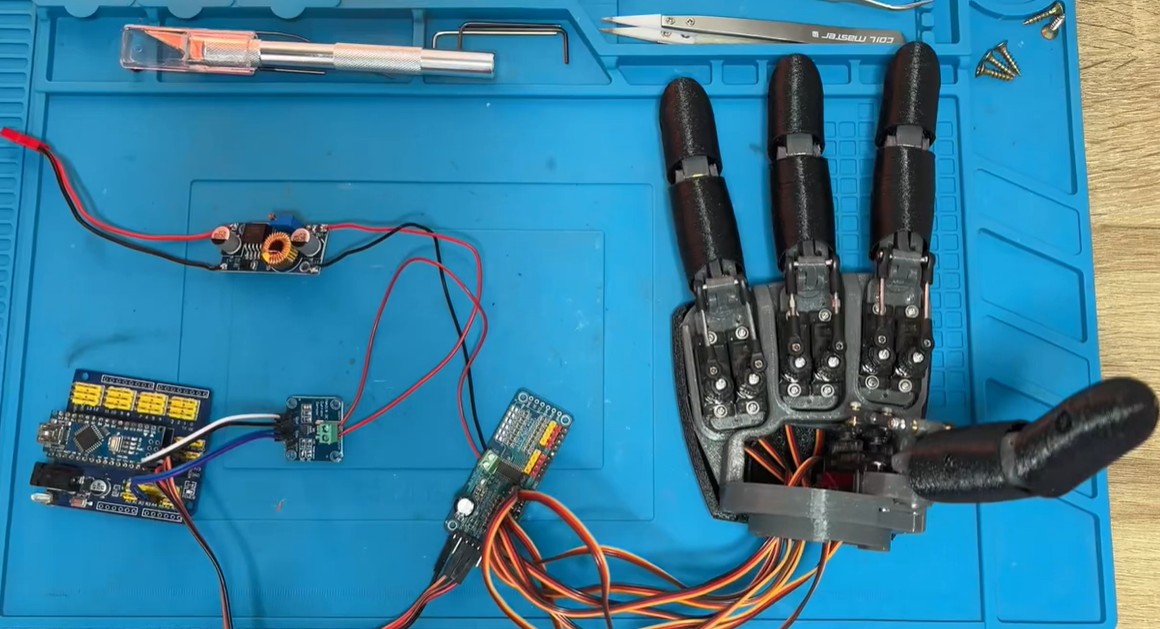
Code and model to control the AH!
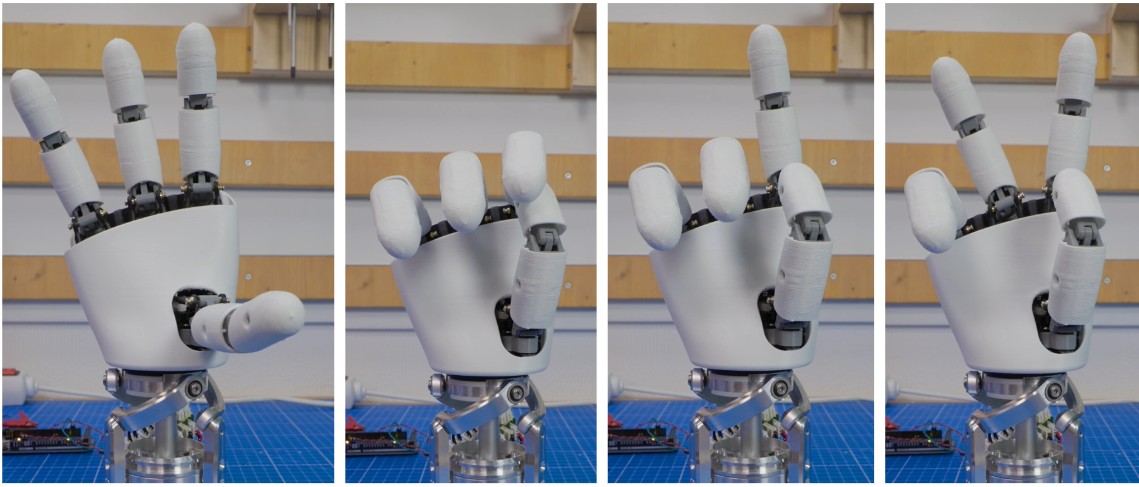
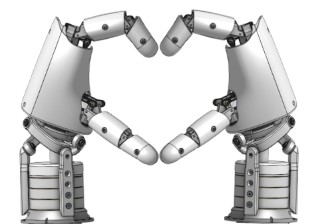
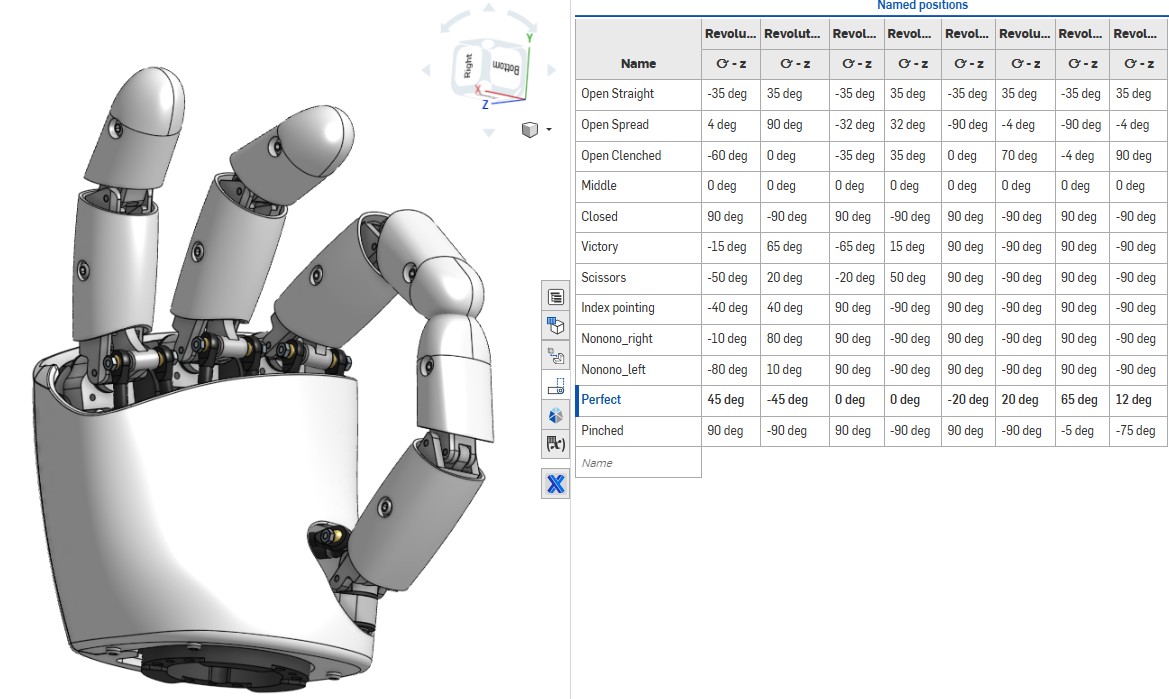
AmazingHand 是一个开源的人形机器人手部项目,旨在以极低的成本实现高表达力的灵巧操作。传统机器人手要么价格昂贵,要么结构复杂,往往需要将驱动电机外置在手臂中并通过线缆传动,导致体积大、维护难。AmazingHand 则将所有8个自由度(4根手指,每根手指2个关节联动)的驱动电机全部集成在手部内部,无需任何外部线缆,整体重量仅400克,物料成本控制在200欧元以内,且全部零件均可3D打印。
标签
项目特点
**全集成驱动**:所有8个伺服电机(Feetech SCS0009)均内置于手部,无需外部线缆或前臂驱动。
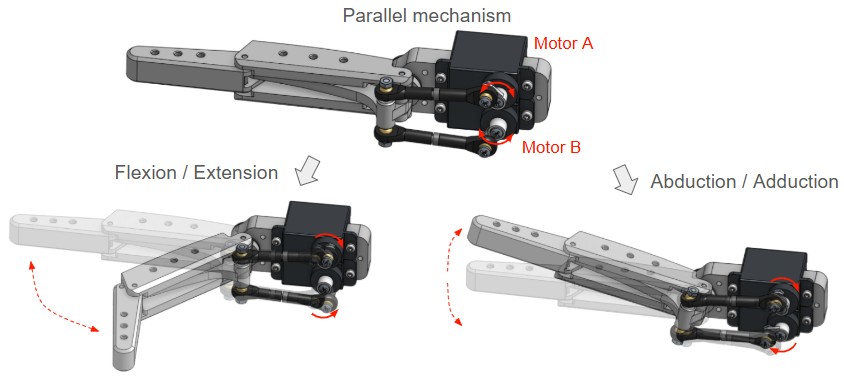
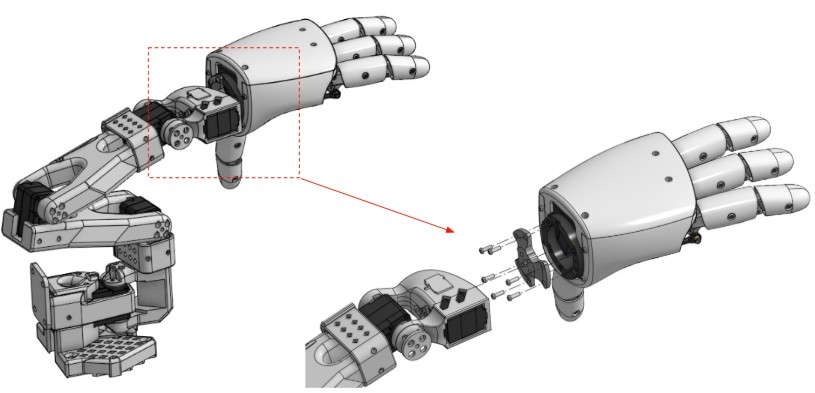
**欠驱动设计**:每根手指通过平行机构驱动,实现屈伸和外展/内收运动,结构紧凑。
**低成本与开源**:总物料成本低于200欧元,所有设计文件(CAD、BOM、固件)均开源。
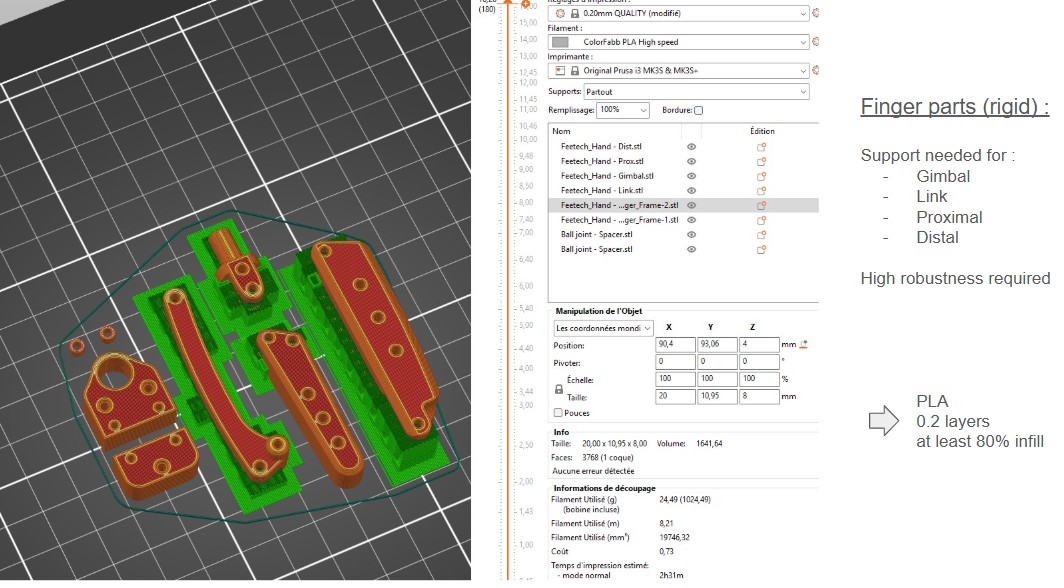
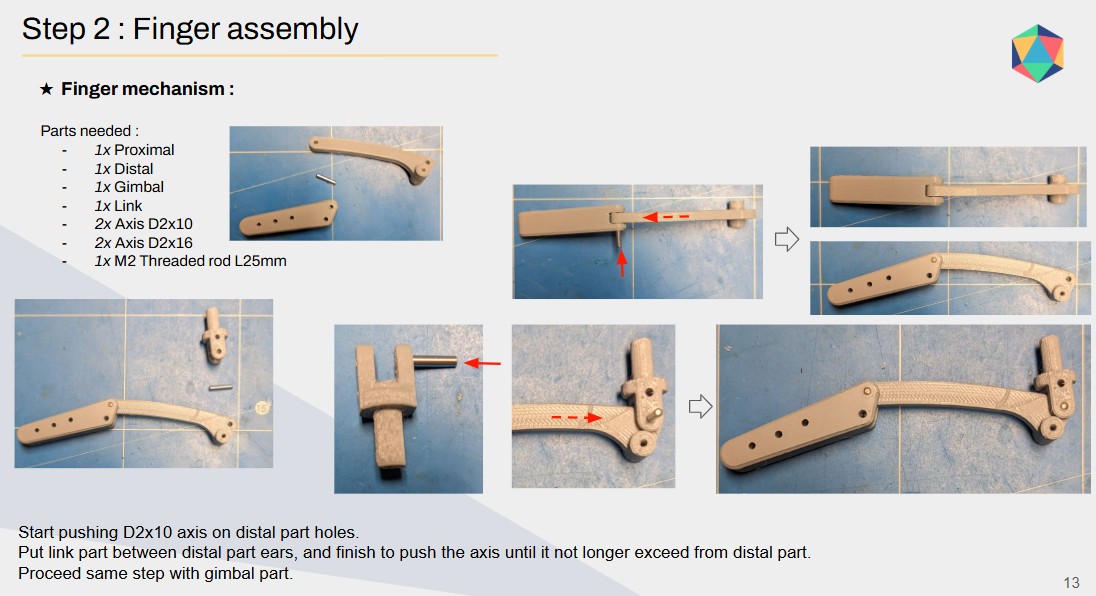
**3D打印友好**:几乎所有结构件均可通过3D打印制造,并提供详细的打印指南。
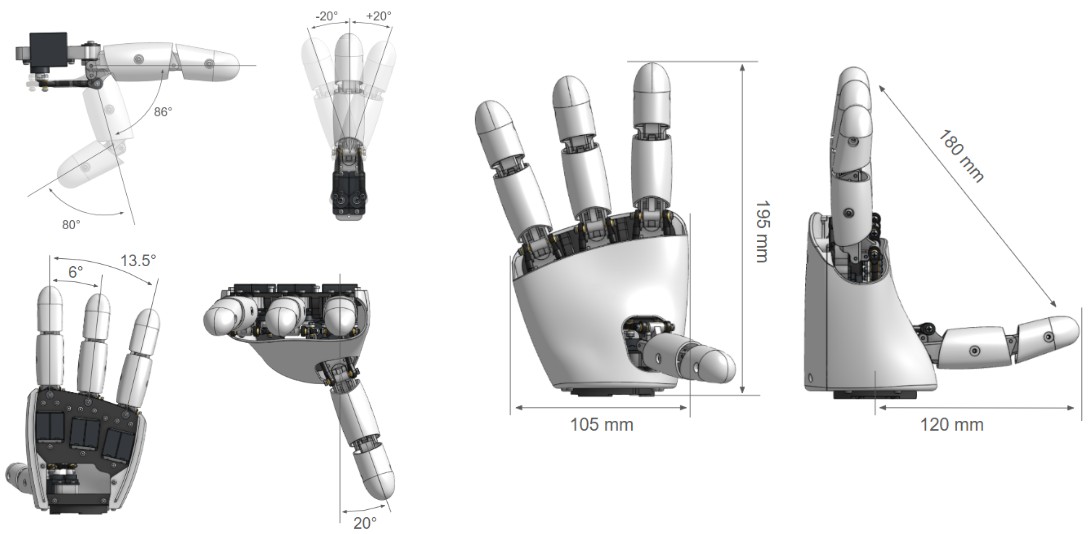
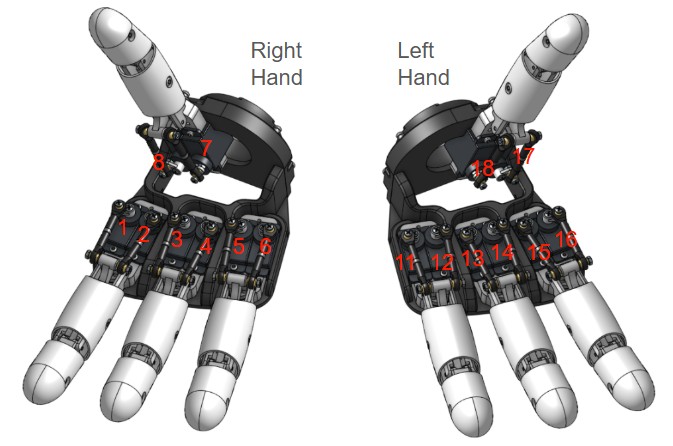
**兼容性强**:手腕接口专为Reachy2的Orbita 3D手腕设计,但易于适配其他机器人。
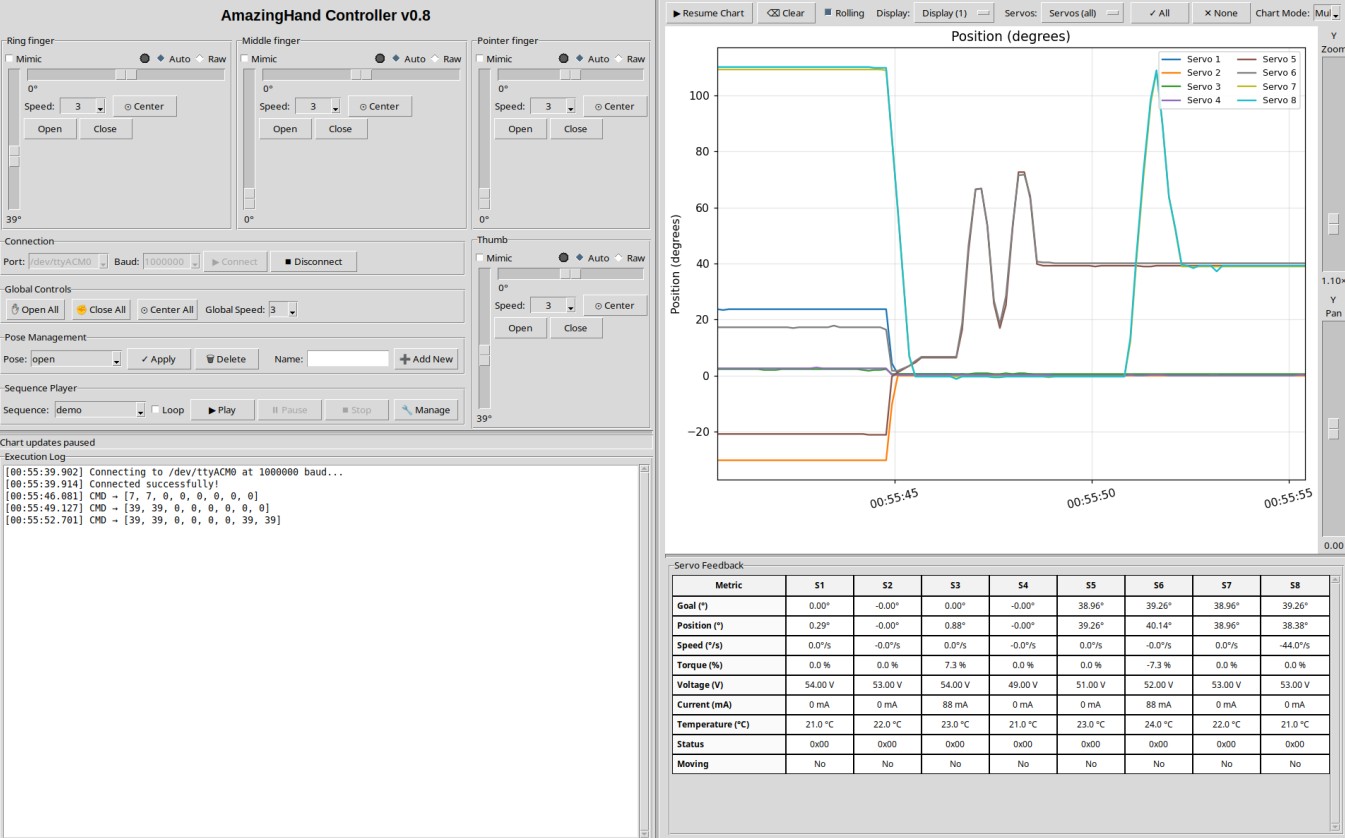
**双控制方案**:支持Python脚本(通过串行总线)和Arduino程序(通过TTL Linker)两种控制方式。
**社区活跃**:拥有丰富的社区贡献,包括专用控制GUI、SG90伺服适配、SO-Arm接口等。
技术规格
| 自由度 | 8 DOF(4指,每指2个关节) |
|---|---|
| 驱动器 | 8x Feetech SCS0009 智能伺服 |
| 驱动方式 | 平行机构(每指2个伺服) |
| 重量 | 约400克 |
| 成本 | <200欧元 |
| 材料 | 3D打印(PLA/PETG等)+ 柔性外壳 |
| 控制接口 | 串行总线(TTL) |
| 电源 | 外部5V/2A DC电源 |
| 兼容平台 | Reachy2(默认),可适配其他机器人 |
| 许可证 | 软件:Apache 2.0;机械设计:CC BY 4.0 |
项目资源
搜索资源
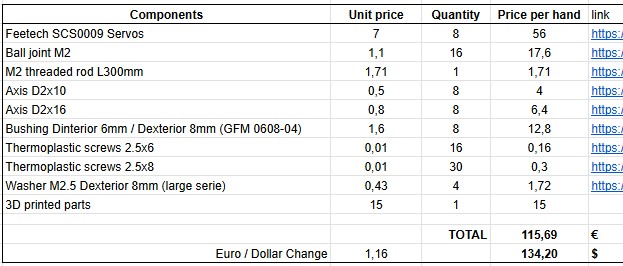
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Feetech SCS0009 智能伺服 | 8 | — | 每指2个 |
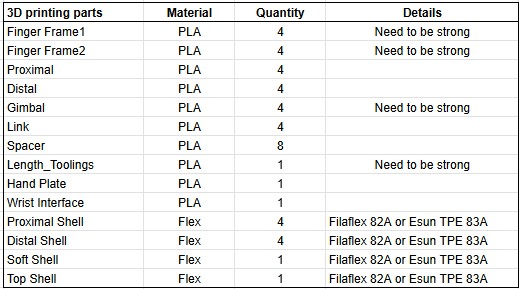
| 3D打印零件(手指、手掌、手腕等) | 1套 | — | 详见3D打印清单 |
| 柔性外壳 | 1套 | — | 3D打印柔性材料 |
| 球头连杆 | 若干 | — | 手动调节 |
| 串行总线驱动器(如Waveshare) | 1 | — | 或Arduino + TTL Linker |
| 外部5V/2A电源适配器 | 1 | — | DC接口 |
| 连接线缆 | 若干 | — | 根据控制方案 |
| M2/M3螺丝、螺母、垫片 | 1套 | — | 详见BOM |
| 伺服舵盘 | 8 | — | 与SCS0009匹配 |
3D 模型
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库


视频
所需技能
🔧 **动手能力**:需要熟练使用3D打印机、焊台和螺丝刀等工具进行机械组装和电子焊接。组装过程涉及精细的连杆调整和伺服校准。
💻 **编程能力**:需要具备Python或Arduino编程基础,能够编写和调试控制脚本。理解串行通信协议(TTL)和伺服控制逻辑。
⚡ **电子电路**:需要了解基本电路知识,包括电源连接、串行总线布线以及伺服ID配置。能够使用万用表进行故障排查。
适用场景
**机器人研究**:作为低成本、高自由度的灵巧手平台,用于抓取、操作和手部运动学的研究。
**教育演示**:适合机器人课程、创客空间和大学实验室,用于教学演示和项目实践。
**仿生机器人**:集成到Reachy2等仿人机器人上,增强其操作能力。
**开源硬件开发**:作为开源硬件项目,供开发者修改、优化和扩展功能。
**社区贡献**:参与社区项目,如开发专用控制GUI、适配不同伺服电机或创建新的接口。