Nav2 - ROS 2导航框架
navigation2
ROS
1/5
🧩 软硬件结合
已发布
项目简介
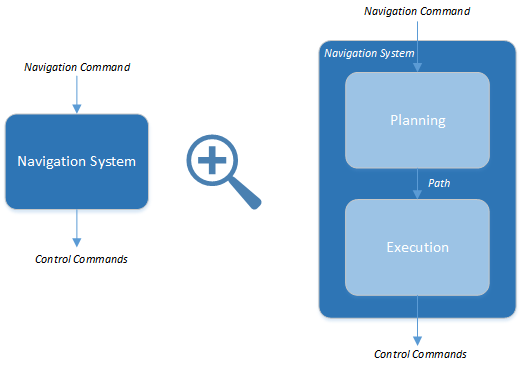
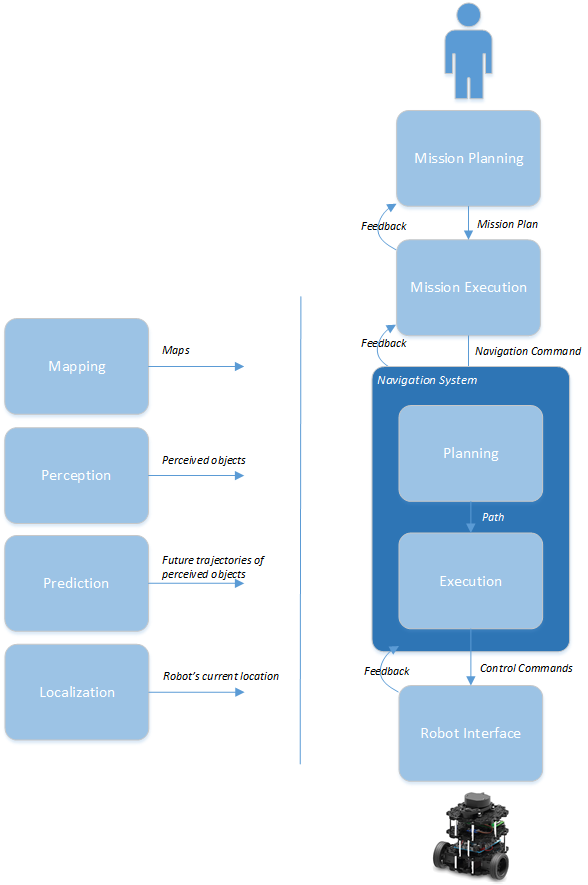
ROS 2导航框架与系统
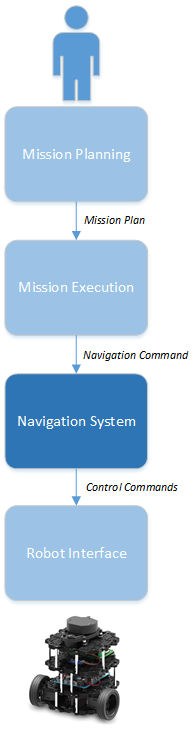
ROS Navigation Stack 是机器人操作系统(ROS)生态中一个核心的2D导航功能包集。它主要解决移动机器人在已知或未知环境中从当前位置自主导航到目标点的问题。该堆栈通过融合里程计数据、激光雷达或深度相机等传感器信息,以及用户指定的目标位姿,实时计算出安全的速度指令,驱动移动底盘平稳移动。
标签
项目特点
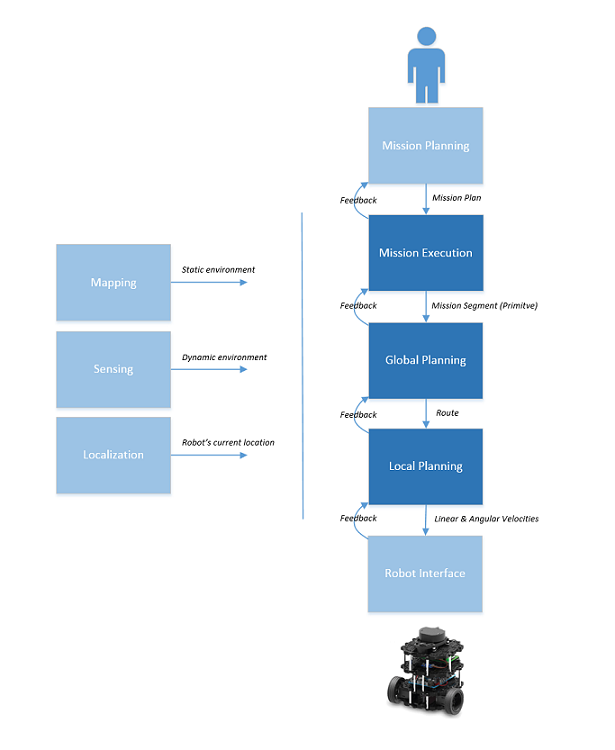
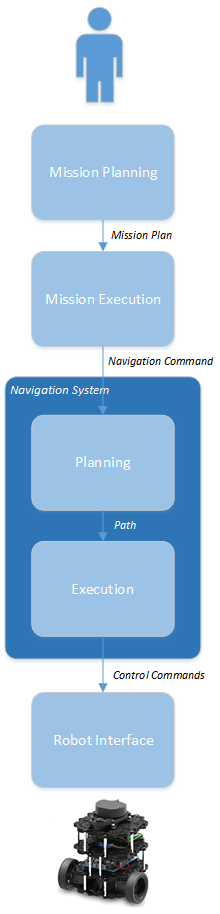
**完整的导航管线**:集成地图服务(map_server)、定位(AMCL)、路径规划(全局/局部规划器)、控制(控制器)和恢复行为
**模块化插件架构**:所有核心组件均可通过插件替换,支持自定义算法
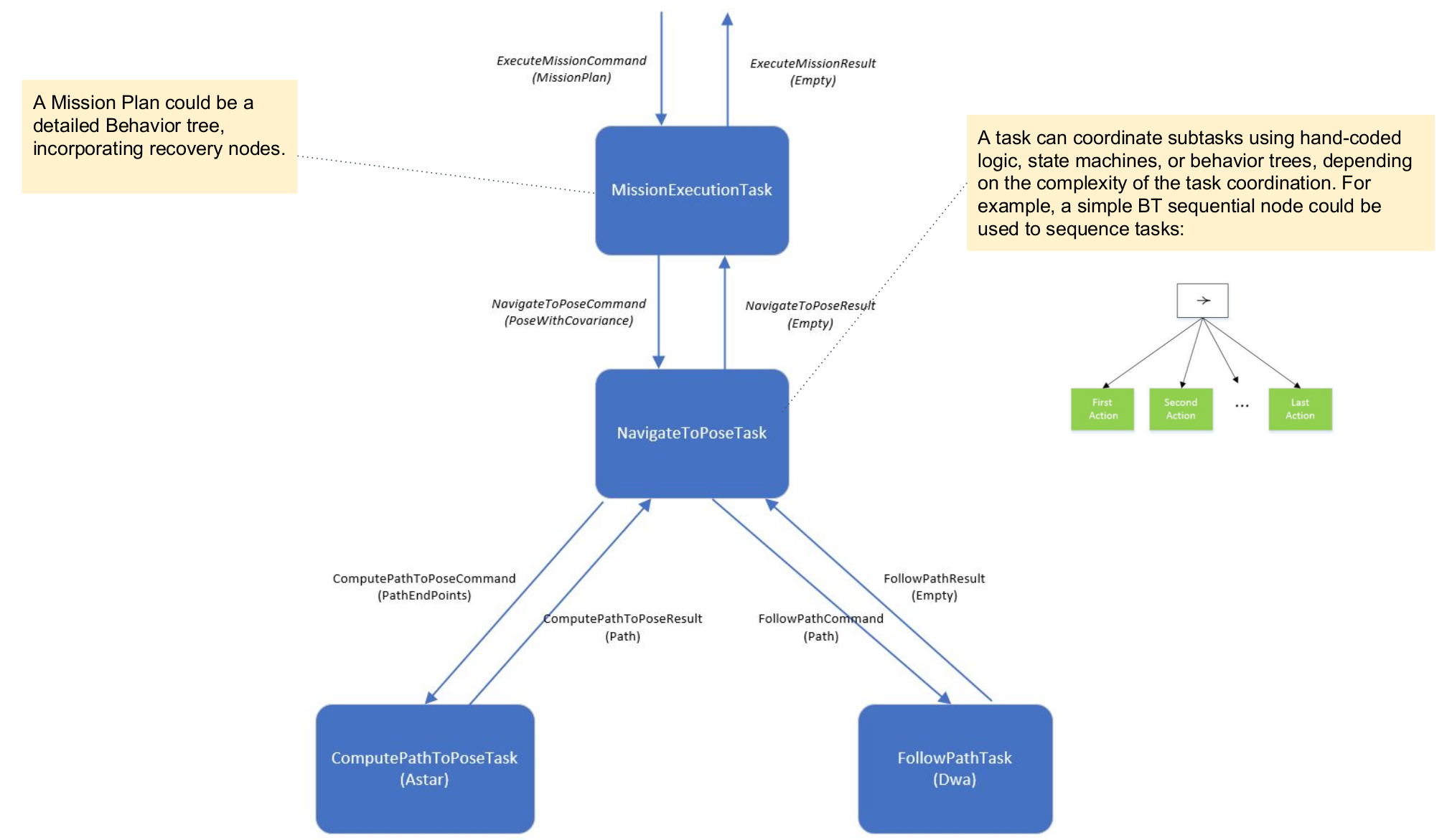
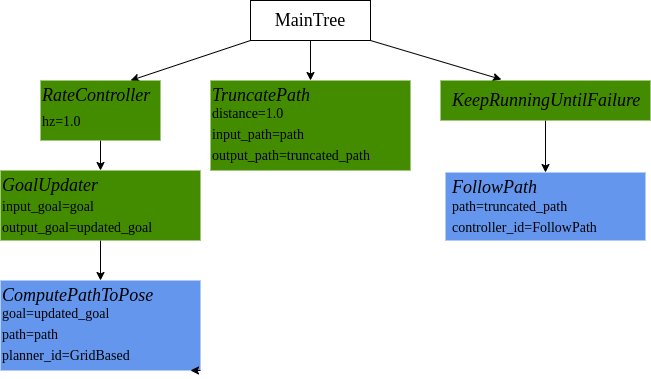
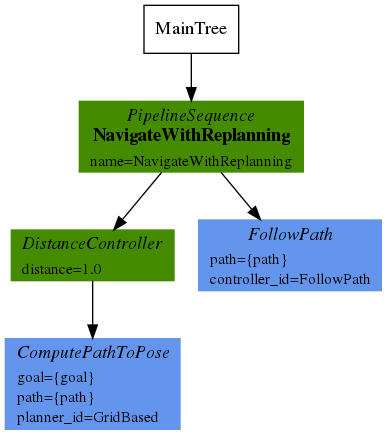
**行为树驱动**:使用行为树(Behavior Trees)管理导航任务流程,灵活可配置
**多平台支持**:支持ROS 2的多个发行版(Humble、Jazzy、Kilted等)
**丰富的算法库**:包含Smac Planner(Hybrid A*、State Lattice、2D)、Regulated Pure Pursuit等多种先进算法
**完善的文档和教程**:提供从入门到高级开发的完整文档和示例
技术规格
| 框架 | ROS 2 (Humble/Jazzy/Kilted) |
|---|---|
| 编程语言 | C++17 |
| 核心算法 | AMCL定位、NavFn/Dijkstra/A*全局规划、DWB/Regulated Pure Pursuit局部控制 |
| 行为树 | BehaviorTree.CPP v3 |
| 地图格式 | Occupancy Grid (YAML+PGM/PNG) |
| 坐标系 | REP 105 (map, odom, base_link) |
| 通信 | ROS 2 Topics/Services/Actions |
| 许可证 | Apache-2.0 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ROS 2 (Humble/Jazzy/Kilted) | 1 | — | 必需 |
| Nav2源码或二进制包 | 1 | — | 可选源码编译 |
| 移动机器人平台 | 1 | — | 差速/全向/阿克曼 |
| 激光雷达/深度相机 | 1 | — | 用于建图和定位 |
| 里程计传感器 | 1 | — | 轮式编码器/IMU |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库





所需技能
🔧 **动手能力**:需要搭建或配置移动机器人平台(差速/全向/阿克曼),安装传感器(激光雷达、深度相机、IMU等),并进行硬件调试
💻 **编程能力**:需要C++编程经验,理解ROS 2节点、话题、服务、动作等通信机制,能够编写自定义插件和算法
⚡ **电子电路**:需要了解机器人硬件接口(串口、I2C、CAN等),能够连接和配置传感器和执行器
适用场景
服务机器人自主导航(送餐、清洁、巡检等)
工业AGV/AMR路径规划与控制
学术研究与算法验证(路径规划、定位、控制算法)
教育机器人平台(TurtleBot3、Jackal等)