MissionPlanner
Mission Planner Ground Control Station for ArduPilot (c# .net)
mavros
MAVLink to ROS gateway with proxy for Ground Control Station
Fast-Planner
A Robust and Efficient Trajectory Planner for Quadrotors
gym-pybullet-drones
PyBullet Gymnasium environments for single and multi-agent reinforcement learning of quadcopter control
apm_planner
APM Planner Ground Control Station (Qt)
Teach-Repeat-Replan
Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments
FMT-Firmware
Firmament Autopilot Embedded System
XTDrone
UAV Simulation Platform based on PX4, ROS and Gazebo
FUEL
An Efficient Framework for Fast UAV Exploration
mit-acl/faster
3D Trajectory Planner in Unknown Environments
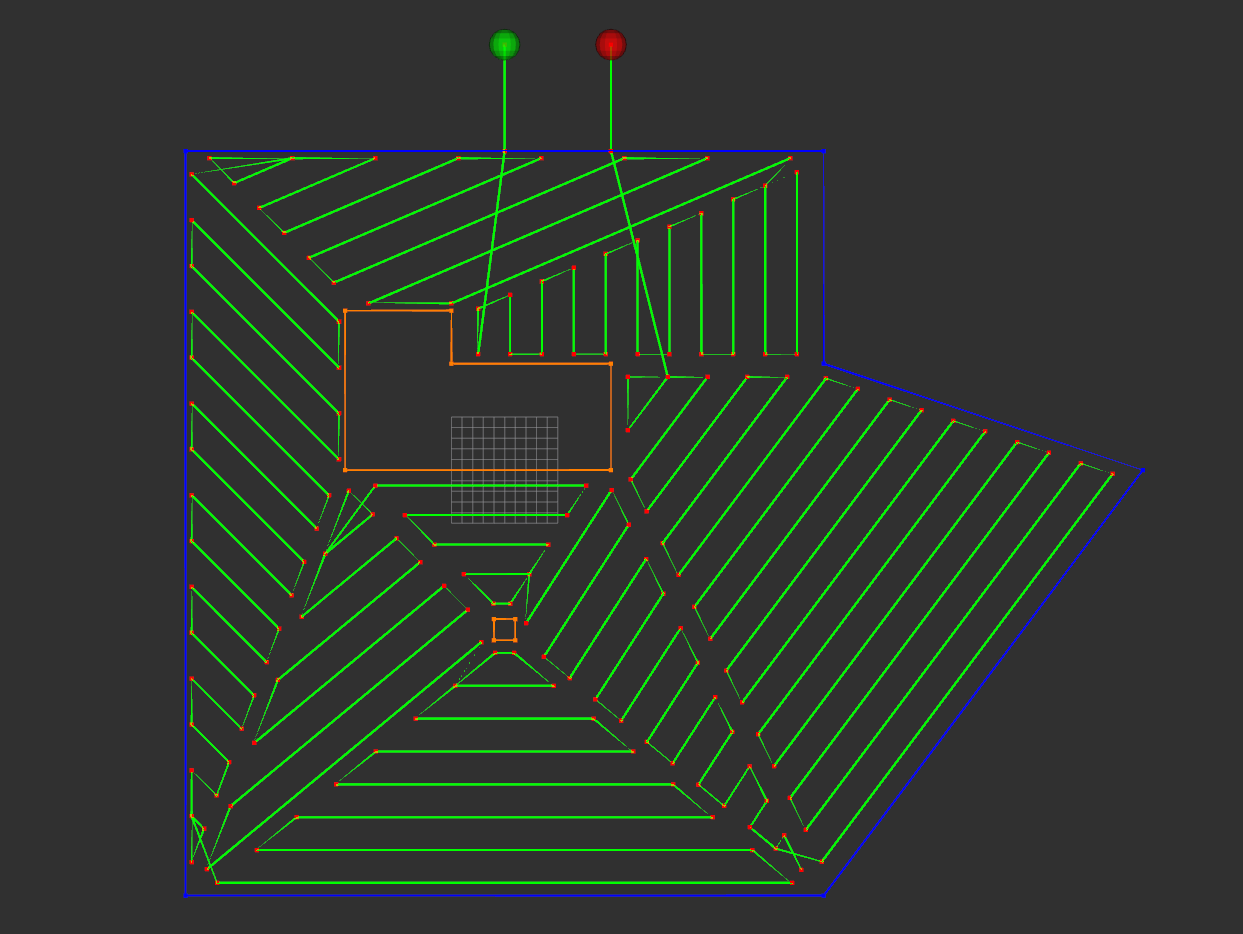
ethz-asl/polygon_coverage_planning
Coverage planning in general polygons with holes.
bolderflight/sbus
Arduino and CMake library for communicating with SBUS receivers and servos.
KumarRobotics/kr_autonomous_flight
KR (KumarRobotics) autonomous flight system for GPS-denied quadrotors
szebedy/autonomous-drone
This repository intends to enable autonomous drone delivery with the Intel Aero RTF drone and PX4 autopilot. The code ca
makeecat/Peng
A minimal quadrotor autonomy framework in Rust (Mac, Linux, Windows)
A simple tool to generate gazebo terrain using satellite images and DEM data.