FMT飞控固件
FMT-Firmware
机器人, 飞控/无人机
3/5
🧩 软硬件结合
已发布
项目简介
Firmament Autopilot Embedded System
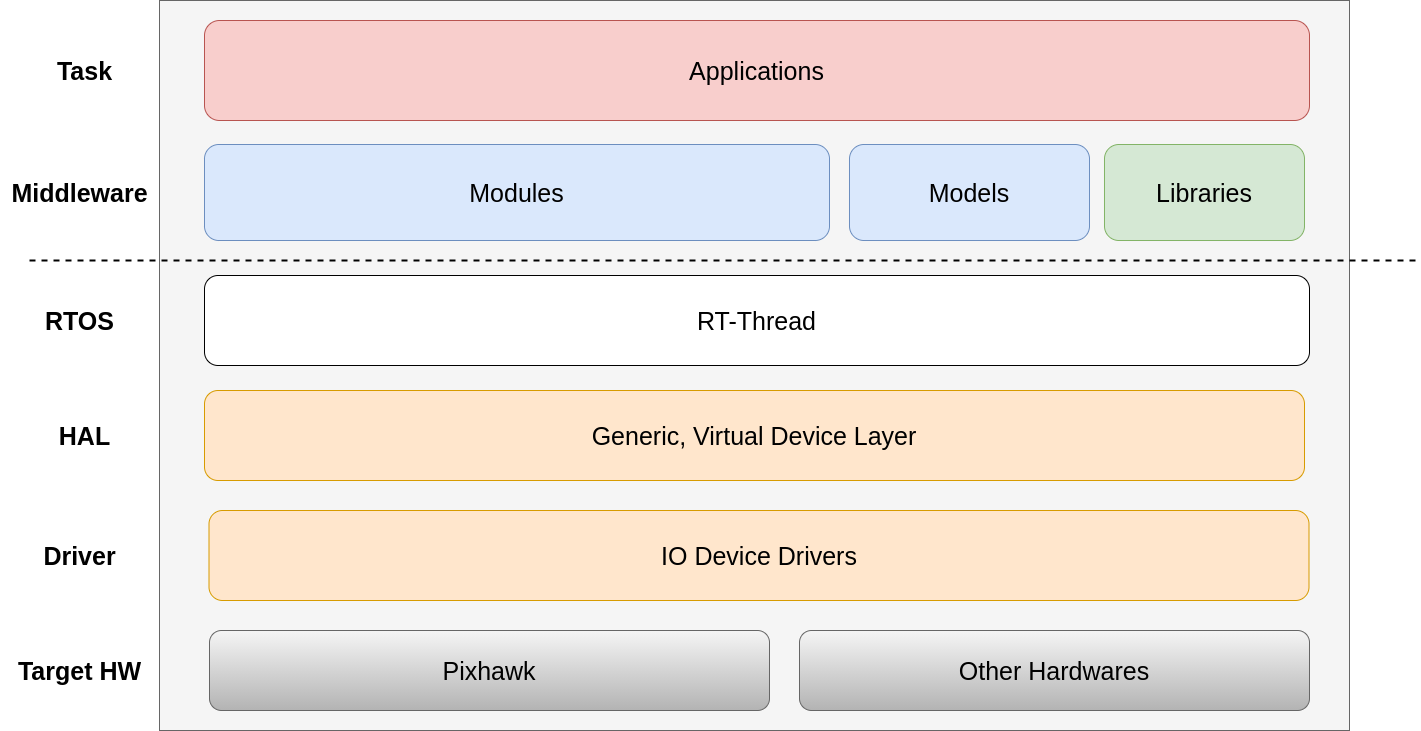
FMT-Firmware 是一个基于模型设计(Model-Based Design, MBD)的先进自动驾驶仪系统,由 Firmament Autopilot 团队开发,旨在为无人机、汽车、船舶、机器人等自主运载工具快速构建稳定、高性能的控制系统。该项目由两部分组成:FMT-Firmware 本身是一个用 C/C++ 编写的嵌入式系统,提供稳定可靠的实时控制能力;而 FMT-Model 则是一个基于 MATLAB/Simulink 的仿真框架,集成了丰富的算法库,支持从 Simulink 模型自动生成代码,并适配 ARM、AMD、Intel 等多种硬件平台。
标签
项目特点
**高效开发**:基于模型的设计方法,调试更容易,开发效率高。
**高性能嵌入式系统**:使用 C/C++ 设计,稳定可靠。
**强大的仿真框架**:基于 MATLAB/Simulink,提供丰富的算法库。
**自动代码生成**:从 Simulink 模型自动生成代码,适配多种硬件平台。
**卓越的实时性能**:基于 RT-Thread RTOS,拥有活跃的社区和大量第三方组件。
**广泛硬件支持**:支持 Pixhawk (FMUv2/FMUv5) 等主流开源硬件。
**跨平台工具链**:支持 Windows/Linux/Mac 系统。
**标准通信协议**:支持 Mavlink 协议和 QGroundControl 地面站。
技术规格
| 核心架构 | 基于模型设计 (MBD) |
|---|---|
| 嵌入式系统语言 | C/C++ |
| 仿真框架 | MATLAB/Simulink |
| 实时操作系统 | RT-Thread |
| 支持硬件 | SIEON S1, AMOV ICF5, CUAV V5-Nano, CUAV V5+, CUAV 7Nano, Pixhawk4 (FMUv5), Pixhawk (FMUv2), QEMU vexpress-a9 |
| 通信协议 | Mavlink |
| 地面站 | QGroundControl |
| 许可证 | Apache-2.0 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| SIEON S1 / Pixhawk4 (FMUv5) / 其他兼容飞控 | 1 | — | 选择一种支持的硬件 |
| Amovlab MFP450 或自选机架 | 1 | — | 根据载具类型选择 |
| 无刷电机 (如 2212 或 2208) | 4 | — | 四旋翼配置 |
| 30A 无刷电调 | 4 | — | 与电机匹配 |
| 10寸或11寸 | 4 | — | 与电机和机架匹配 |
| 4S 或 6S LiPo 电池 | 1 | — | 根据载具需求选择 |
| Ublox M8N 或类似模块 | 1 | — | 用于定位和导航 |
| 支持 SBUS/PPM 的遥控器 | 1 | — | 用于手动控制 |
| 433MHz 或 915MHz 数传 | 1 | — | 用于与地面站通信 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 3/5
项目图库

所需技能
🔧 **动手能力**:需要能够组装无人机机架、焊接电子元件、连接飞控与各种传感器和动力系统。
💻 **编程能力**:需要具备 C/C++ 编程基础,了解嵌入式系统开发,能够使用 Git 进行版本控制,并能在命令行环境下编译固件。
⚡ **电子电路**:需要了解基本的电子电路知识,包括电源管理、传感器接口(I2C、SPI、UART)、PWM 信号等。
适用场景
**无人机开发**:用于四旋翼、六旋翼、固定翼等无人机平台的飞控系统开发。
**教育科研**:作为基于模型设计的教学平台,用于研究控制算法、导航算法和嵌入式系统。
**机器人控制**:可用于地面机器人、水面无人船等自主载具的控制系统。
**工业应用**:用于农业植保、测绘、巡检等工业无人机的飞控系统。