XTDrone 无人机仿真平台
XTDrone
机器人, 飞控/无人机
3/5
🧩 软硬件结合
已发布
项目简介
UAV Simulation Platform based on PX4, ROS and Gazebo
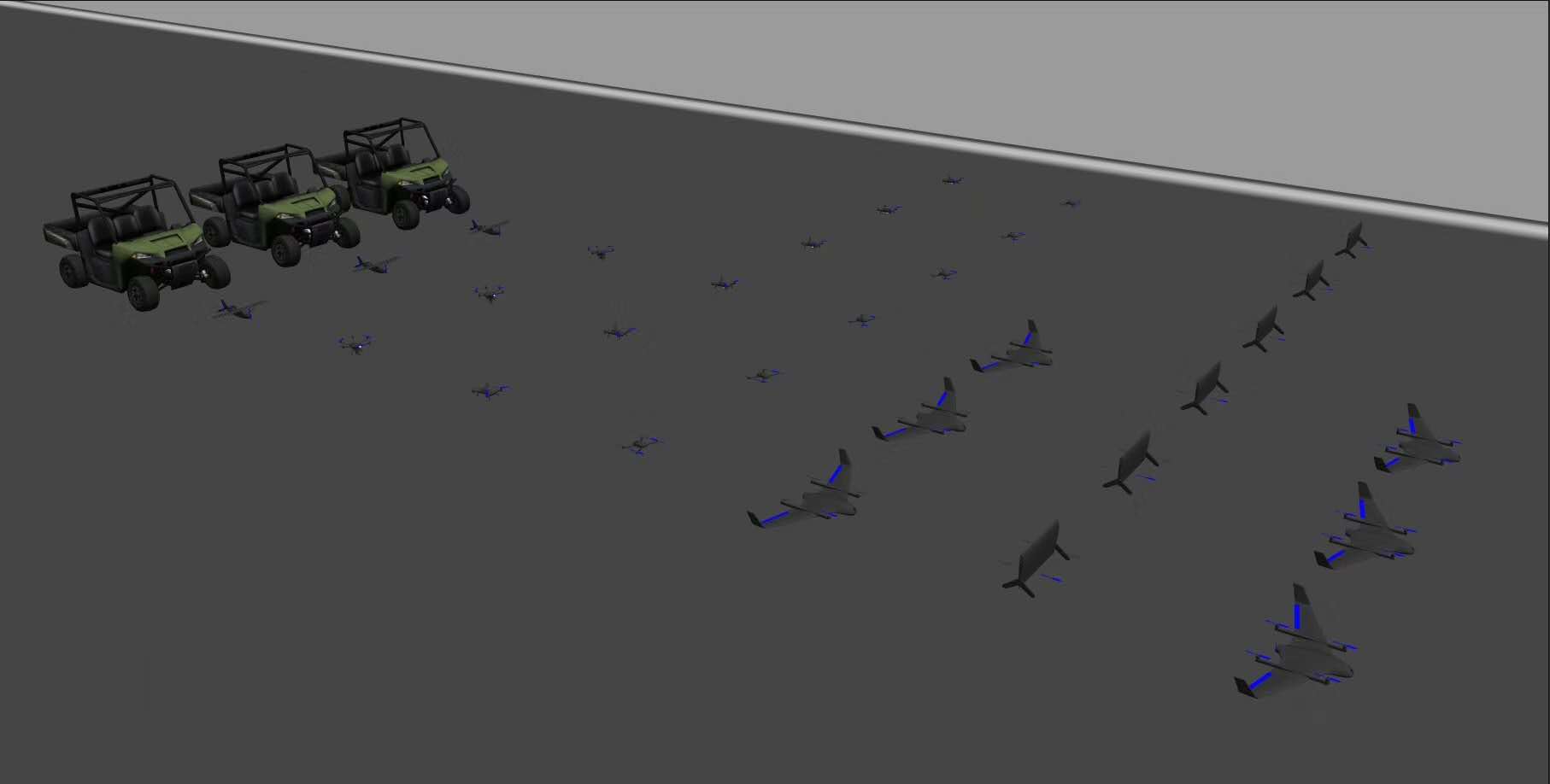
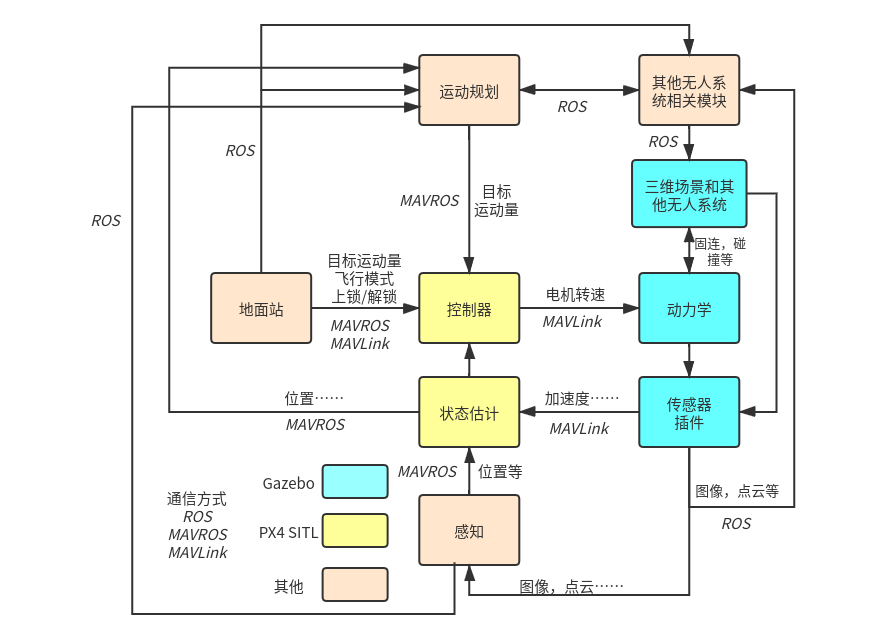
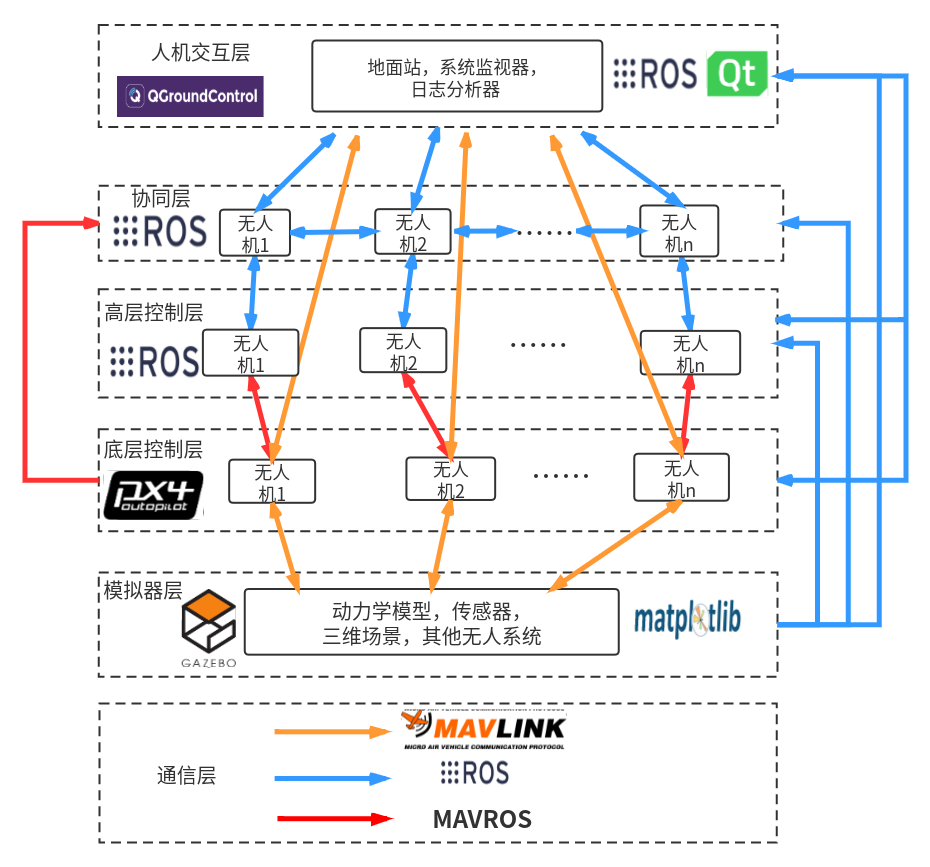
XTDrone 是一个基于 PX4、ROS 与 Gazebo 的开源无人机通用仿真平台,旨在为无人机开发者提供从算法验证到真实部署的一站式解决方案。该平台支持多种无人系统,包括多旋翼飞行器(四轴和六轴)、固定翼飞行器、复合翼飞行器(如 quadplane、tailsitter 和 tiltrotor),以及无人车、无人船和机械臂等,覆盖了当前主流的无人平台类型。其核心优势在于,在仿真环境中验证通过的算法可以方便地直接迁移到真实无人机上,极大降低了开发与测试成本。
标签
项目特点
**多机型支持**:支持多旋翼、固定翼、复合翼、无人车、无人船和机械臂等多种无人系统。
**算法验证**:提供丰富的算法验证示例,包括双目SLAM、视觉惯性导航、2D/3D激光SLAM、运动规划、目标检测与追踪、多机编队等。
**真实部署**:仿真验证过的算法可方便地部署到真实无人机上。
**学术支持**:相关论文已发表,可用于学术研究的仿真验证。
**社区活跃**:有活跃的开发团队和贡献者,并用于中国机器人大赛。
技术规格
| 仿真环境 | Gazebo |
|---|---|
| 飞控固件 | PX4 |
| 通信框架 | ROS |
| 支持机型 | 多旋翼(四轴、六轴)、固定翼、复合翼(quadplane、tailsitter、tiltrotor)、无人车、无人船、机械臂 |
| 主要功能 | SLAM、运动规划、目标检测与追踪、多机编队、精准降落等 |
| 论文引用 | K. Xiao et al., "XTDrone: A Customizable Multi-rotor UAVs Simulation Platform," ICRAS 2020 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Ubuntu | 1 | — | 推荐18.04或20.04 |
| ROS | 1 | — | Melodic或Noetic |
| Gazebo | 1 | — | 与ROS版本匹配 |
| PX4 | 1 | — | 最新稳定版 |
| MAVROS | 1 | — | 用于ROS与PX4通信 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 4/5
项目图库












所需技能
🔧 **动手能力**:需要能够搭建和配置Linux环境,安装ROS、Gazebo、PX4等软件。
💻 **编程能力**:需要掌握C++或Python,熟悉ROS编程,能够编写和调试无人机控制与感知算法。
⚡ **电子电路**:不需要,本项目为纯软件仿真。
适用场景
**无人机算法研发**:用于快速验证和迭代SLAM、运动规划、目标跟踪等算法。
**无人机集群研究**:用于多机编队、协同控制、精准降落等集群算法的仿真。
**无人机教学与培训**:作为无人机相关课程的教学平台,帮助学生理解无人机系统。
**竞赛准备**:用于中国机器人大赛无人机挑战赛仿真组的赛前训练。