搜索 "motion" 找到 40 个结果
A Video Surveillance OS For Single-board Computers
open Multiple View Geometry library. Basis for 3D computer vision and Structure from Motion.
A command line toolkit to generate maps, point clouds, 3D models and DEMs from drone, balloon or kite images. 📷
A Robust and Efficient Trajectory Planner for Quadrotors
[CVPR 2023 Best Paper Award] Planning-oriented Autonomous Driving
MoveIt运动规划框架。
Central repository for tools, tutorials, resources, and documentation for robotics simulation in Unity.
ESP32 Camera motion capture application to record JPEGs to SD card as AVI files and stream to browser as MJPEG. If a mic
Open-source GNSS + inertial navigation, sensor fusion simulator. Motion trajectory generator, sensor models, and naviga
A Unix, Windows, Raspberry Pi Object Speed Camera using python3, opencv, video streaming, motion tracking. Includes a S
Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments
An Efficient Framework for Fast UAV Exploration
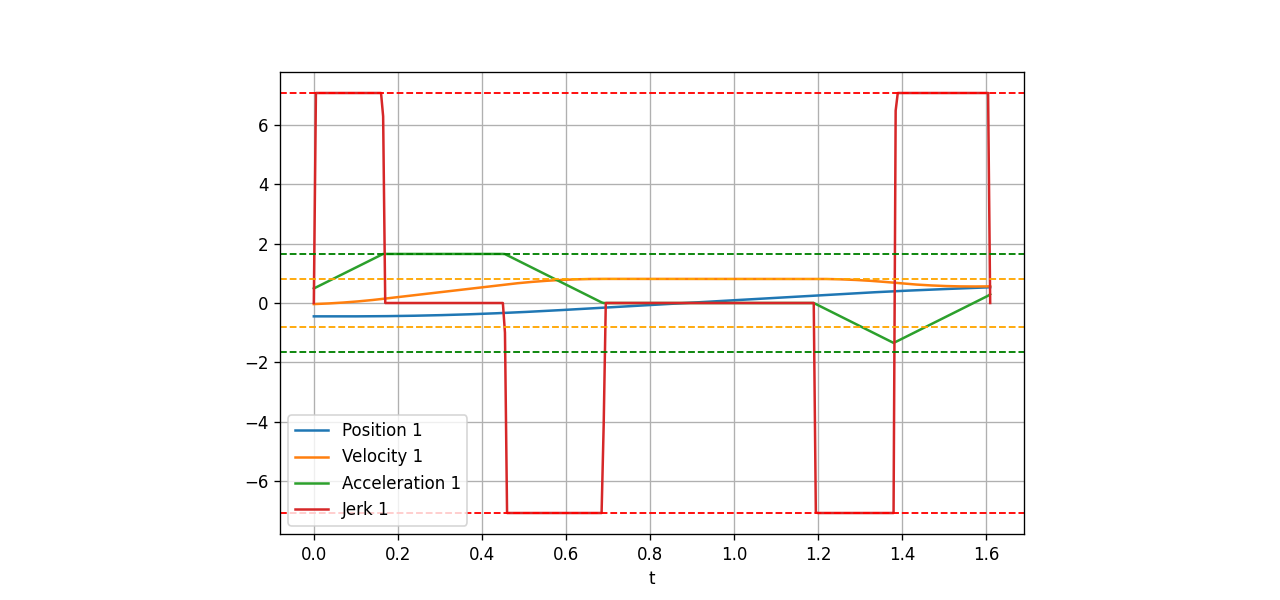
Motion Generation for Robots and Machines. Real-time. Jerk-constrained. Time-optimal.
ProtoMotions is a GPU-accelerated simulation and learning framework for training physically simulated digital humans and
Dynamics and Domain Randomized Gait Modulation with Bezier Curves for Sim-to-Real Legged Locomotion.
Raspberry PI-TIMOLO ( PI-TImelapse, MOtion, LOwLight ) uses RPI picamera and OpenCV for Remote Headless Security Monitor
Simulation Software (ROS/MATLAB) for HECTOR Humanoid Robot Locomotion Control/Bipedal Locomotion Control/Force-and-momen
Official implementation for the paper "Full-Order Sampling-Based MPC for Torque-Level Locomotion Control via Diffusion-S
Deep RL for MPC control of Quadruped Robot Locomotion
MIT mini cheetah四足机器人在pybullet环境用ros模拟。