thingsboard
开源IoT平台,支持设备管理、数据采集、处理与可视化。
pangolin
基于WireGuard®的身份感知VPN和隧道反向代理,用于远程访问。
ORB_SLAM3
ORB-SLAM3:精准开源库,支持视觉、视觉惯性及多地图SLAM。
FAST_LIO
高效鲁棒的LIO包,实现LiDAR-惯性里程计。
self-driving-car-sim
Unity构建的自动驾驶汽车模拟器。
Cheetah-Software
RTKLIB
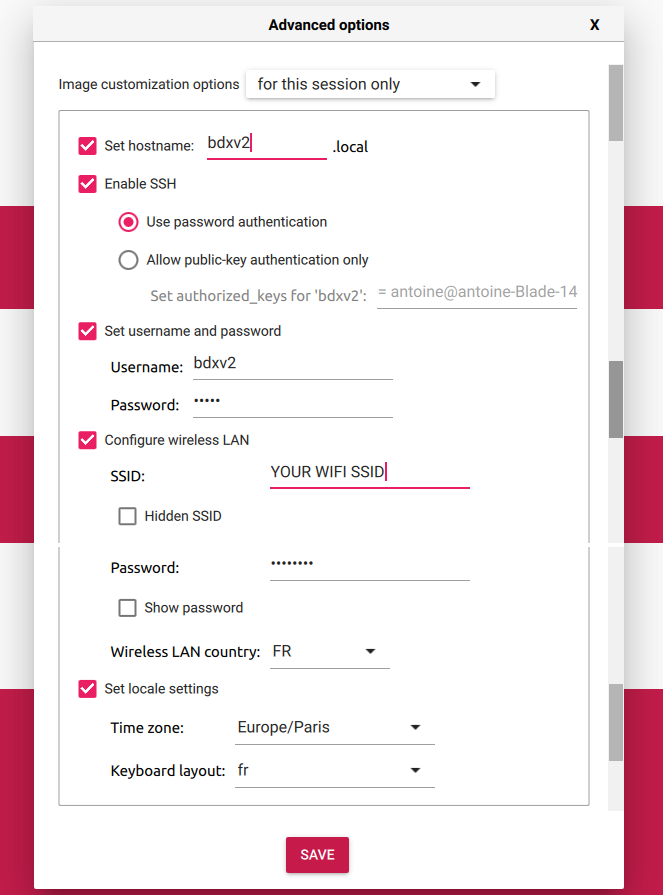
Open_Duck_Mini
制作BDX droid迷你版。https://discord.gg/UtJZsgfQGe
vesc_tool
VESC Tool源码,详见vesc-project.com。
openrov-software
Meta项目,整合所有OpenROV软件项目。
RoboMaster-SDK
DJI RoboMaster Python SDK及EP示例代码。
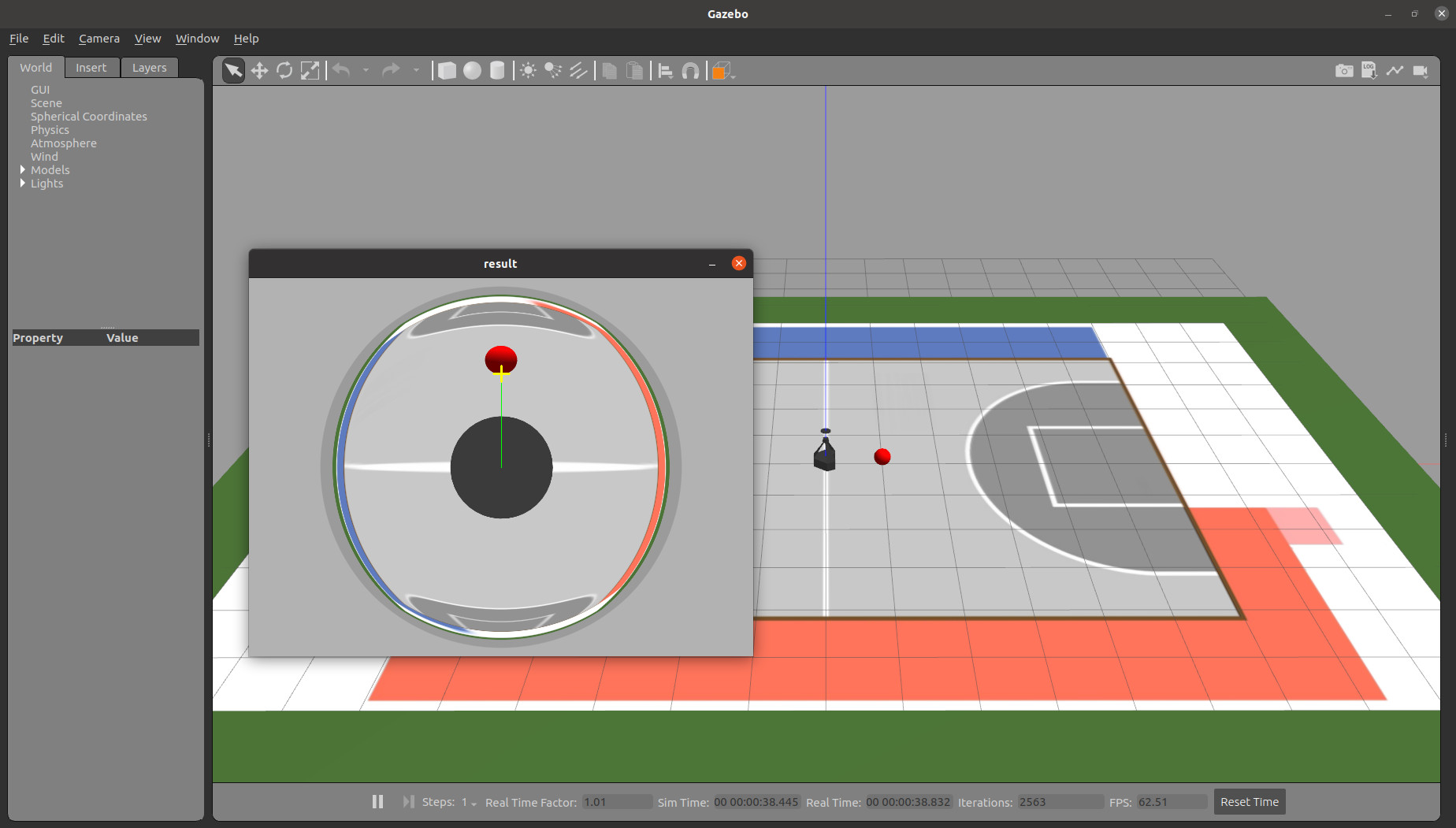
racecar_gazebo
基于Gazebo的MIT Racecar模拟器。
racecar_simulator
MIT Racecar的轻量级模拟器。
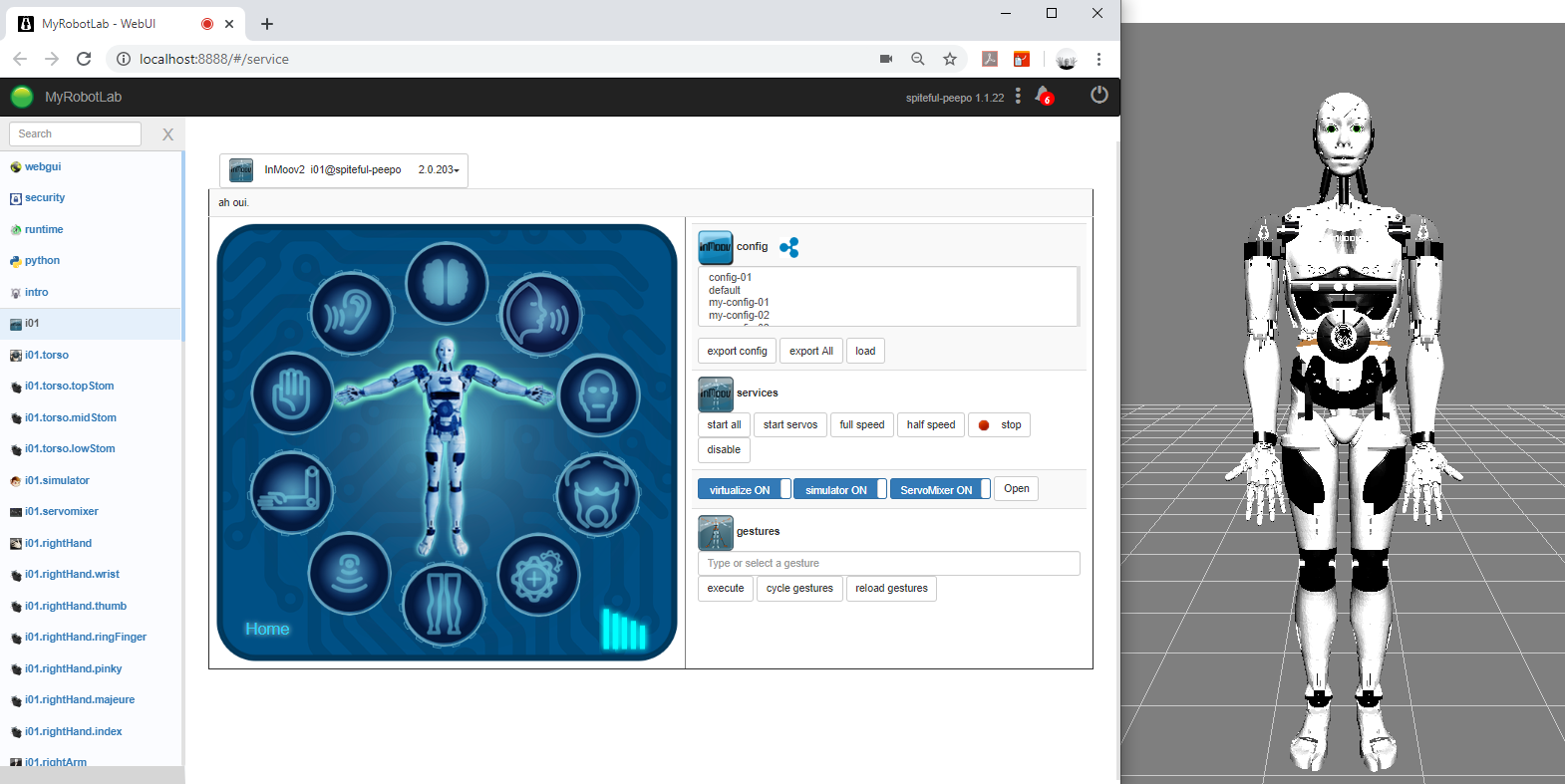
InMoov
inmoov仓库:开源3D打印机器人项目。
Open_Duck_Mini_Runtime
Open Duck Mini的运行时代码。
FSGP_BGK
基于特征稀疏高斯过程的实时时空可通行性评估。
DPtraj
awesome-dji-robomaster
Awesome DJI Robomaster S1 项目,核心功能是编程教育机器人。
satnogs-client
地面站客户端软件
robocon25_proof
RoboCon2025技术验证项目。