InMoov 开源机器人项目
InMoov
智能硬件
1/5
🧩 软硬件结合
已发布
项目简介
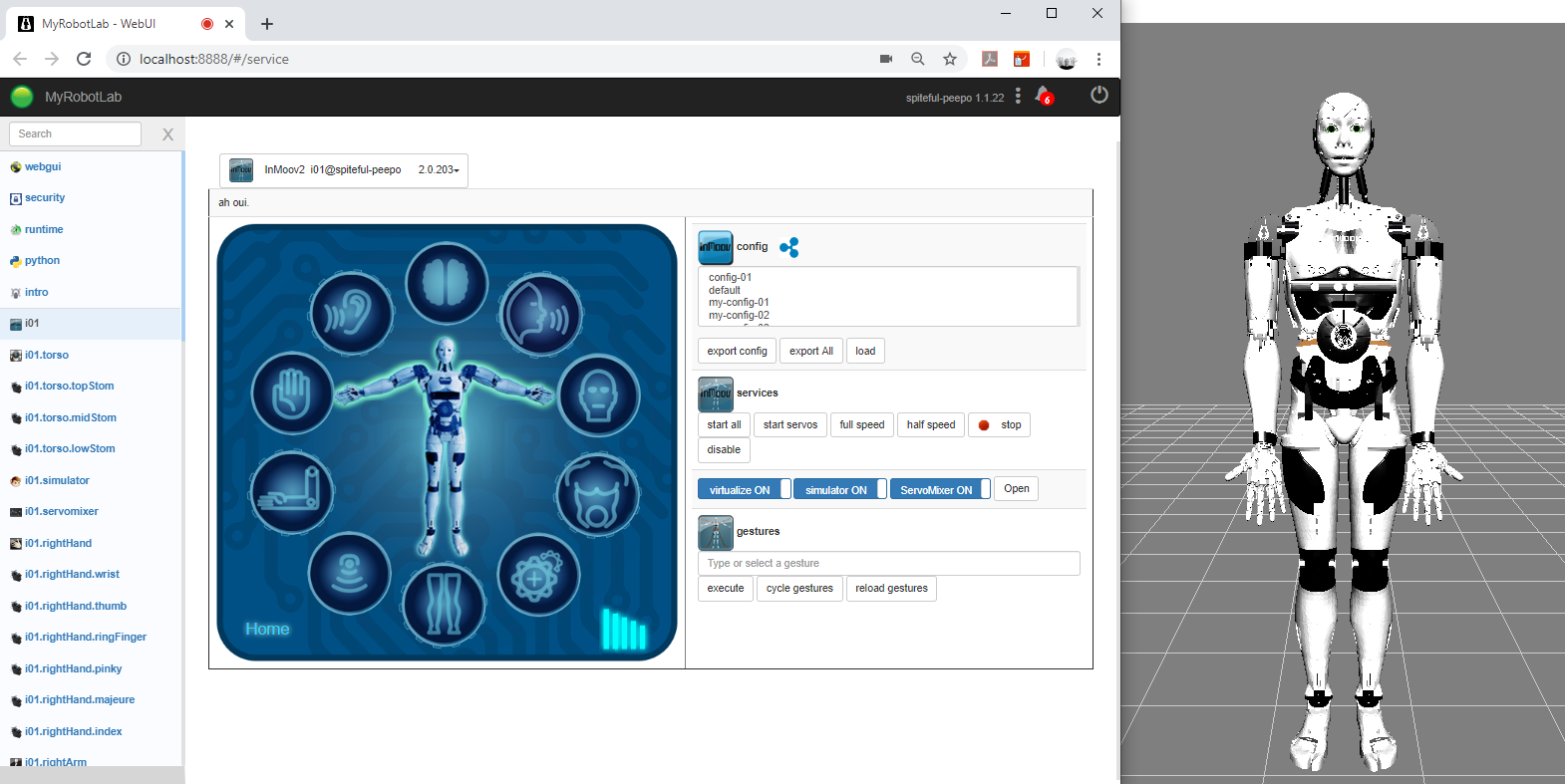
inmoov仓库:开源3D打印机器人项目。
InMoov是一个专为开源人形机器人项目设计的服务启动脚本工具,当前版本为1.0.0。它的核心功能是提供一个完全可配置的国际化启动脚本,能够一键启动InMoov机器人服务,并支持标准化硬件配置的即插即用。该项目基于MyRobotLab框架开发,技术栈主要涉及Java、Arduino控制以及配置文件管理。
项目特点
**全配置化启动**:通过修改 `config` 文件夹下的配置文件,即可调整机器人行为,无需修改核心代码。
**国际化支持**:支持多语言配置(如英语、法语),通过修改 `Inmoov.config` 文件即可切换。
**虚拟环境测试**:默认启动虚拟环境,用户可以在没有真实硬件的情况下安全测试功能。
**模块化设计**:支持分离控制机器人的不同部分(如右手、头部),可配置单 Arduino 或双 Arduino 方案。
**标准化硬件**:针对 InMoov 标准硬件配置进行了优化,开箱即用。
技术规格
| 框架 | MyRobotLab |
|---|---|
| 脚本版本 | v 1.0.0 |
| 硬件架构 | 标准化 InMoov 人形机器人(3D打印+伺服电机) |
| 控制器 | Arduino(支持单/双控制器配置) |
| 通信接口 | 串口(COM口) |
| 配置文件位置 | `config/` 目录 |
| 默认模式 | 虚拟环境(无硬件风险) |
| 语音控制 | 支持(示例命令:`OPEN HAND`) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Arduino 板 | 1-2 | — | 根据配置(单/双控制器) |
| 伺服电机 | 多个 | — | 标准 InMoov 配置,具体数量取决于机器人部位 |
| 3D打印件 | 1套 | — | InMoov 标准模型文件 |
| 伺服电机电源 | 1 | — | 根据电机数量和规格选择 |
| 杜邦线/排线 | 若干 | — | 连接 Arduino 与伺服电机 |
| 运行 MyRobotLab 的主机 | 1 | — | 运行启动脚本和控制系统 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
🔵 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库



















所需技能
🔧 **动手能力**:需要较强的动手能力,包括 3D 打印、机械组装、伺服电机安装和布线。
💻 **编程能力**:需要基本的编程知识,能够修改配置文件(Python/Java 风格),理解 MyRobotLab 框架。
⚡ **电子电路**:需要掌握 Arduino 基础、伺服电机控制、电源管理和串口通信。
适用场景
**机器人爱好者**:适合希望从零搭建一个开源人形机器人的爱好者,体验完整的硬件和软件集成过程。
**教育研究**:可用于机器人学、机电一体化等课程的教学演示和实验平台。
**开源社区贡献**:适合希望参与开源机器人项目开发、测试和文档编写的开发者。
**人机交互实验**:可用于研究语音控制、手势识别等人机交互技术。