自动驾驶汽车模拟器
self-driving-car-sim
智能硬件
1/5
🧩 软硬件结合
已发布

项目简介
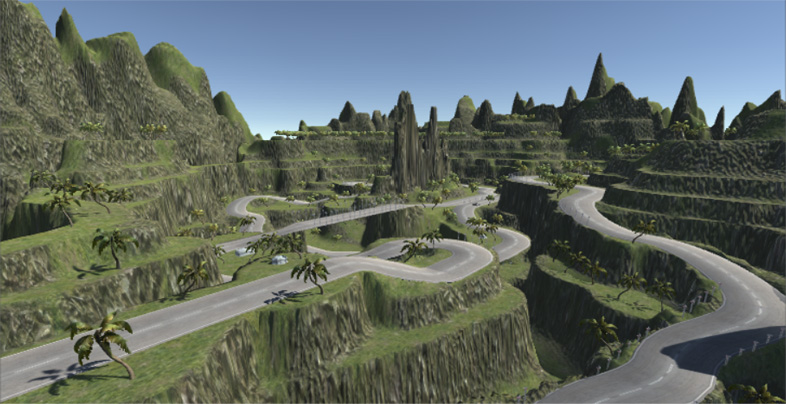
Unity构建的自动驾驶汽车模拟器。
这个项目是Udacity为其中一门自动驾驶纳米学位课程开发的模拟器,主要用于教学场景下的深度学习驾驶行为克隆训练。简单来说,它提供了一个虚拟的驾驶环境,让学员可以收集车辆行驶过程中的图像、转向角、油门和刹车等数据,然后用这些数据训练一个神经网络模型,最终让模型学会像人类一样操控车辆在赛道上自主行驶。项目的核心功能包括:提供带有真实物理反馈的3D赛道(如湖泊赛道和丛林赛道)、支持通过Unity编辑器自定义搭建新赛道、以及通过Socket接口与外部Python程序进行实时数据交互。技术栈方面,整个模拟器基于Unity游戏引擎构建,脚本采用C#编写,而学员端通常使用Python和Keras/TensorFlow等深度学习框架来训练模型。这个项目主要解决了自动驾驶入门教学中“数据采集难”和“环境不可控”的问题,让学员无需真实车辆就能低成本、安全地完成从数据采集到模型部署的完整闭环。它非常适合深度学习初学者、自动驾驶爱好者以及高校相关课程的教学实验场景,帮助理解端到端驾驶模型的工作原理。需要注意的是,当前主分支的代码已经不再维护,建议新用户切换到Unity_2020_3或Unity_2019_4分支以获得更好的兼容性。
项目特点
基于Unity引擎构建,提供逼真的3D驾驶环境
支持多个赛道场景(Term 1、Term 2、Term 3及Capstone)
提供预编译的可执行文件,无需Unity即可运行
支持通过Socket连接与外部AI模型交互
包含完整的车辆物理模拟和控制系统
提供赛道构建工具,可自定义创建新赛道
专为Udacity自动驾驶汽车纳米学位课程设计
技术规格
| 开发引擎 | Unity |
|---|---|
| 支持平台 | Windows、Mac、Linux |
| 编程语言 | C#(Unity脚本) |
| 通信方式 | Socket连接 |
| 场景数量 | 多个(Lake Track等) |
| 课程阶段 | Term 1、Term 2、Term 3、Capstone |
| 推荐Unity版本 | 2020.3 或 2019.4 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Unity | 1 | — | 免费游戏引擎,用于加载和编辑项目 |
| Git LFS | 1 | — | 用于拉取大型纹理和模型资源 |
| Python | 1 | — | 用于训练深度学习模型 |
| TensorFlow/Keras | 1 | — | 深度学习框架 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 3/5
项目图库



















所需技能
🔧 **动手能力**:需要安装和配置Unity、Git LFS等开发工具,下载并运行模拟器
💻 **编程能力**:需要Python编程能力训练深度学习模型,了解C#可修改模拟器脚本
⚡ **电子电路**:无需电子电路知识
适用场景
学习自动驾驶汽车深度学习技术(行为克隆)
测试和验证自动驾驶算法
自动驾驶课程教学和作业练习
自定义赛道和驾驶场景的实验研究