RoboCon2025 技术验证项目
robocon25_proof
智能硬件
1/5
🧩 软硬件结合
已发布
项目简介
RoboCon2025技术验证项目。
RoboCon2025 技术验证项目
项目特点
基于 ROS Noetic 框架,兼容 Ubuntu 20.04 系统
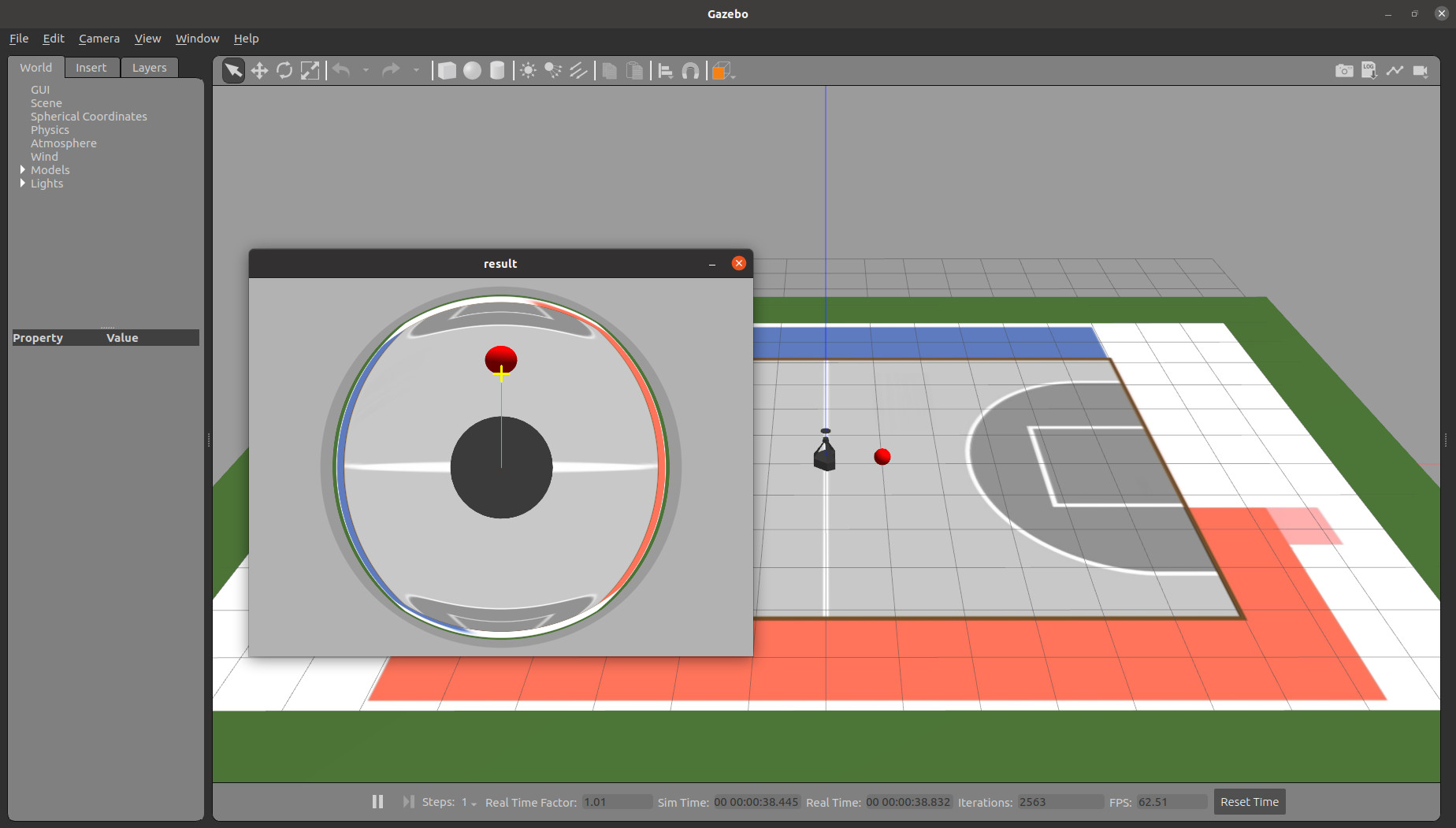
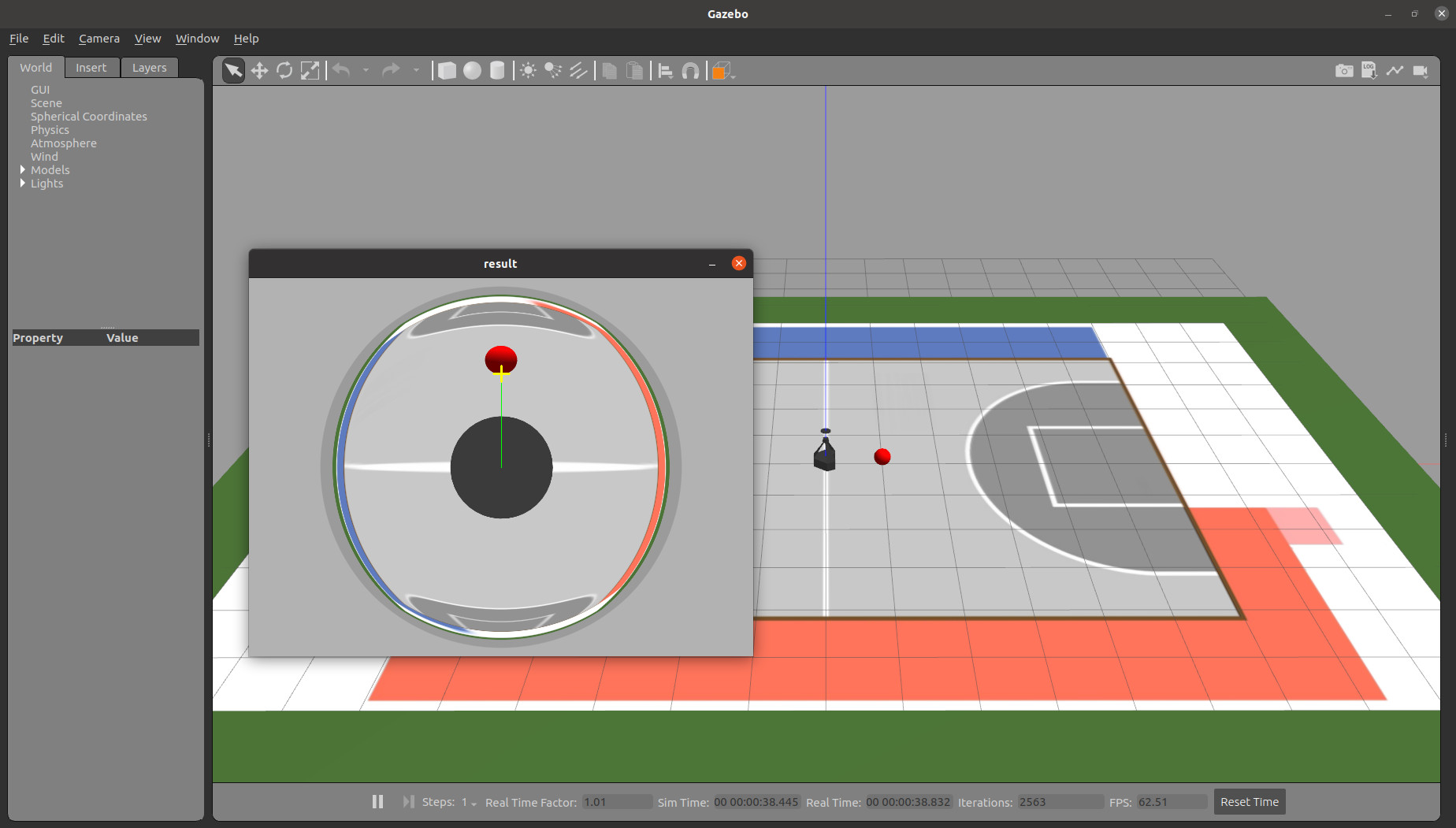
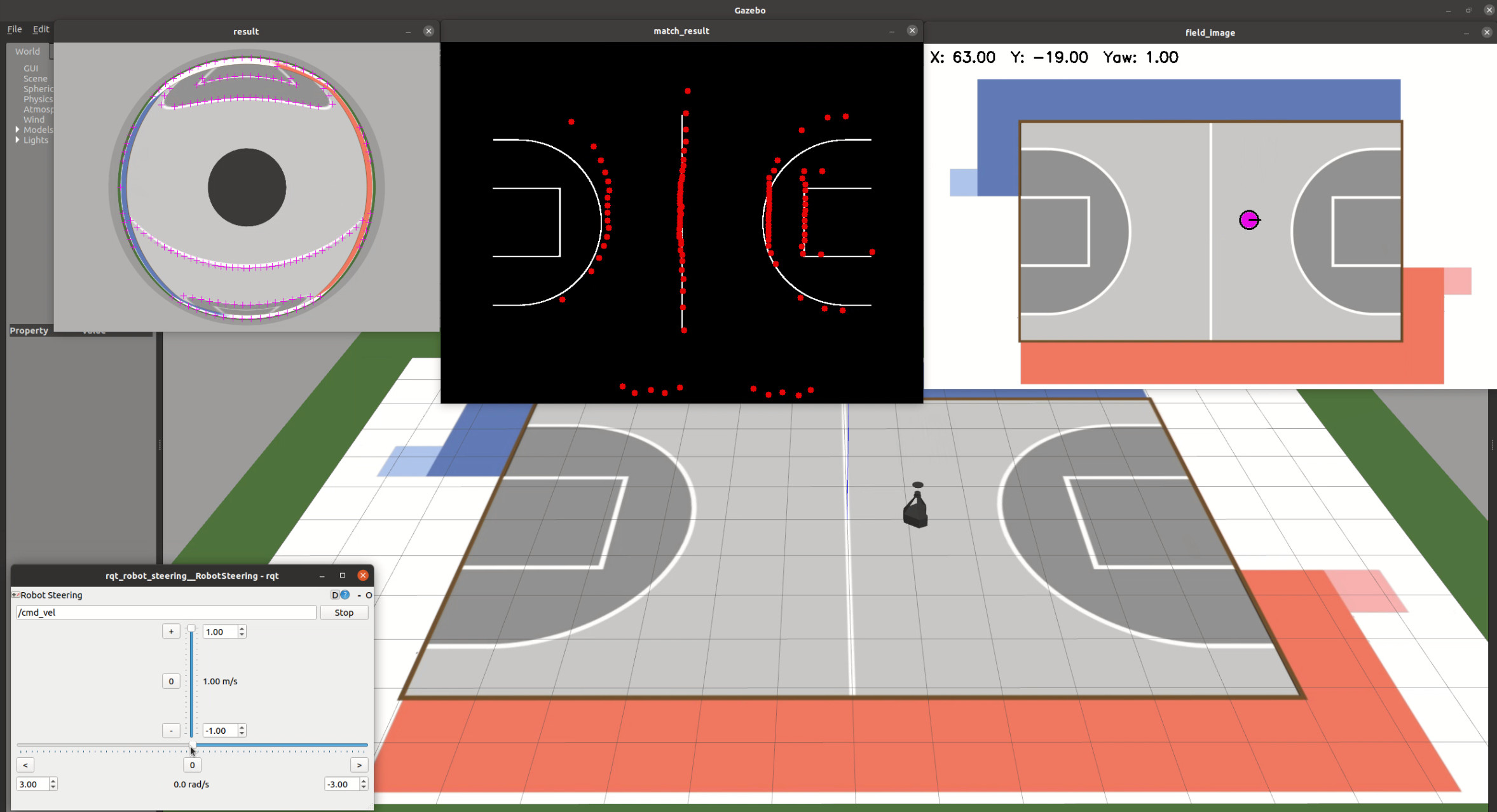
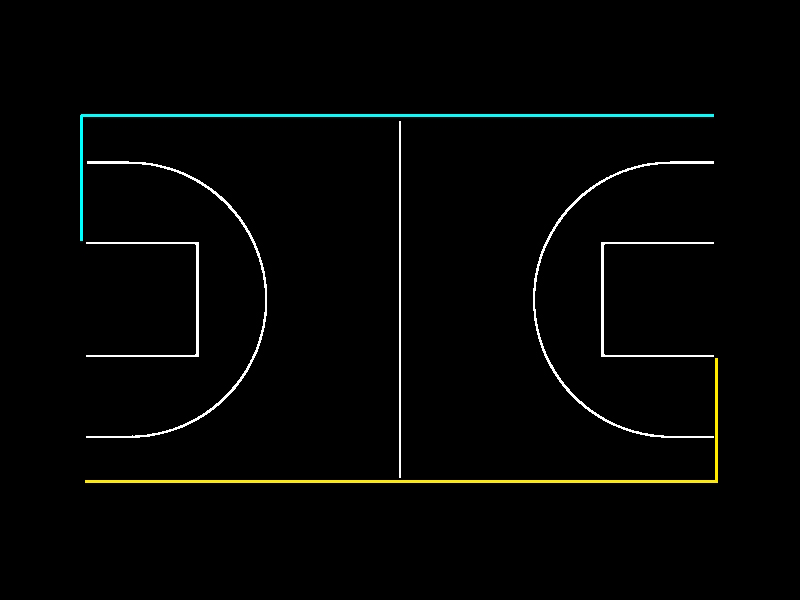
提供纯视觉定位方法,无需额外传感器
包含距离标定功能,提高定位精度
利用红蓝边界剔除干扰,增强视觉鲁棒性
提供完整的 B 站视频教程,从入门到实战
技术规格
| 操作系统 | Ubuntu 20.04 |
|---|---|
| ROS 版本 | Noetic |
| 编程语言 | C++ / Python (ROS) |
| 定位方法 | 纯视觉定位 |
| 标定功能 | 距离标定 |
| 干扰剔除 | 红蓝边界剔除 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Ubuntu 20.04 | 1 | — | 操作系统 |
| ROS Noetic | 1 | — | 机器人操作系统 |
| wpr_simulation | 1 | — | 仿真依赖包 |
| 机器人平台 | 1 | — | 需自行准备(如 TurtleBot 等) |
| 摄像头 | 1 | — | 用于视觉定位 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 2/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库


所需技能
🔧 **动手能力**:能够搭建机器人硬件平台(如 TurtleBot 等),连接摄像头等传感器
💻 **编程能力**:熟悉 ROS 基本操作,能够使用命令行启动节点、编译工作空间,了解 C++/Python 基础
⚡ **电子电路**:无需深入电子知识,但了解基本传感器连接更佳
适用场景
RoboCon 2025 参赛队伍的技术验证和算法开发
机器人视觉定位和导航算法的学习与研究
ROS 初学者通过实战项目快速入门机器人开发
足球机器人相关技术的实验与测试