开源机械鸭
Open_Duck_Mini
智能硬件
1/5
🧩 软硬件结合
已发布
项目简介
制作BDX droid迷你版。https://discord.gg/UtJZsgfQGe
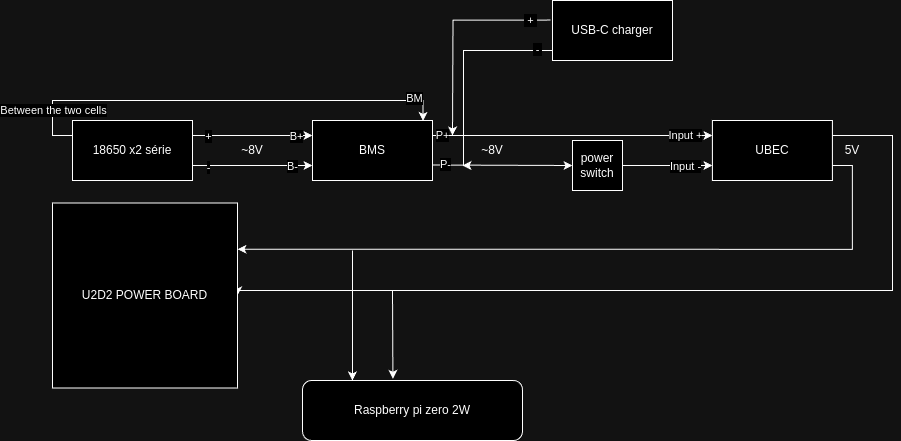
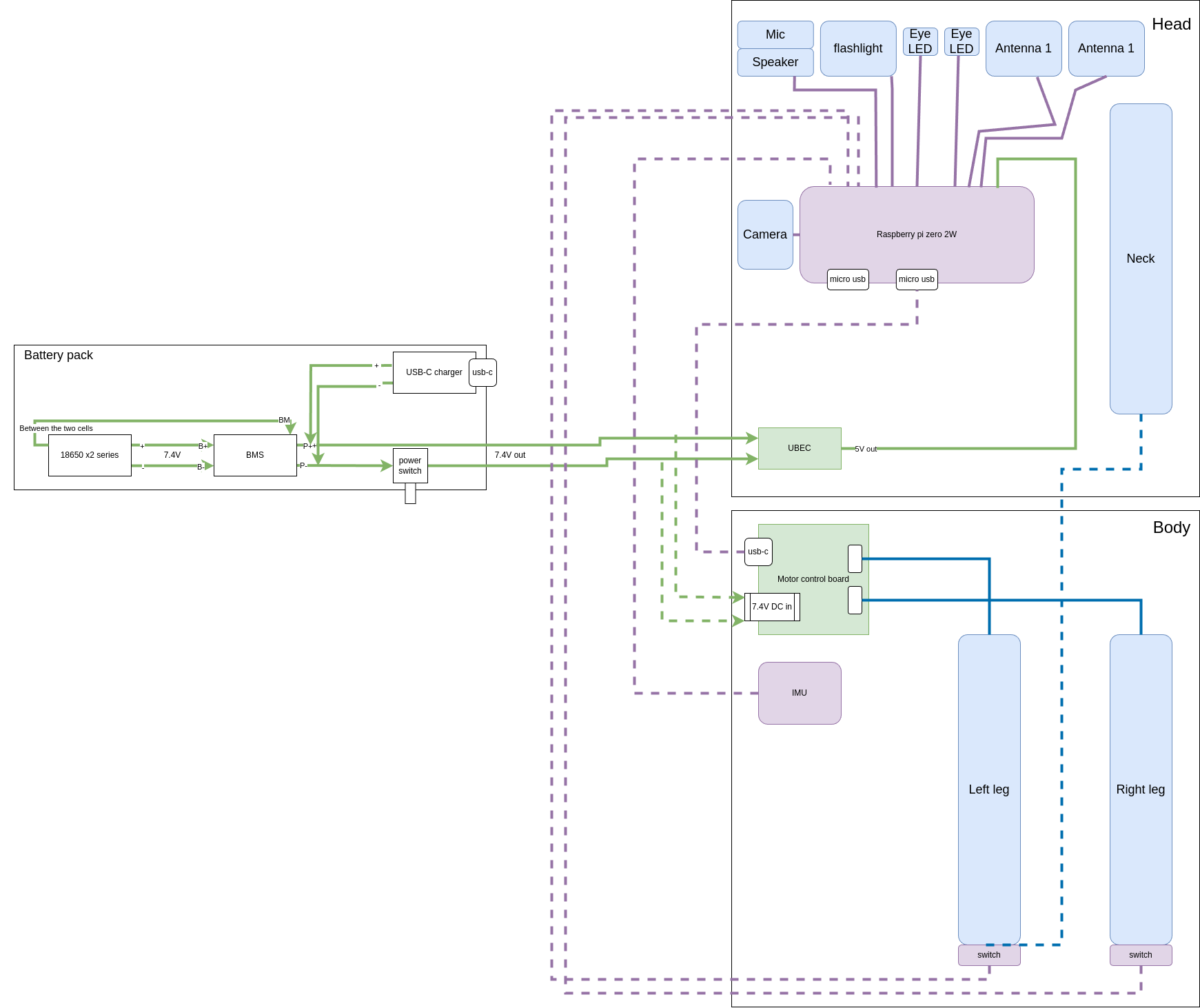
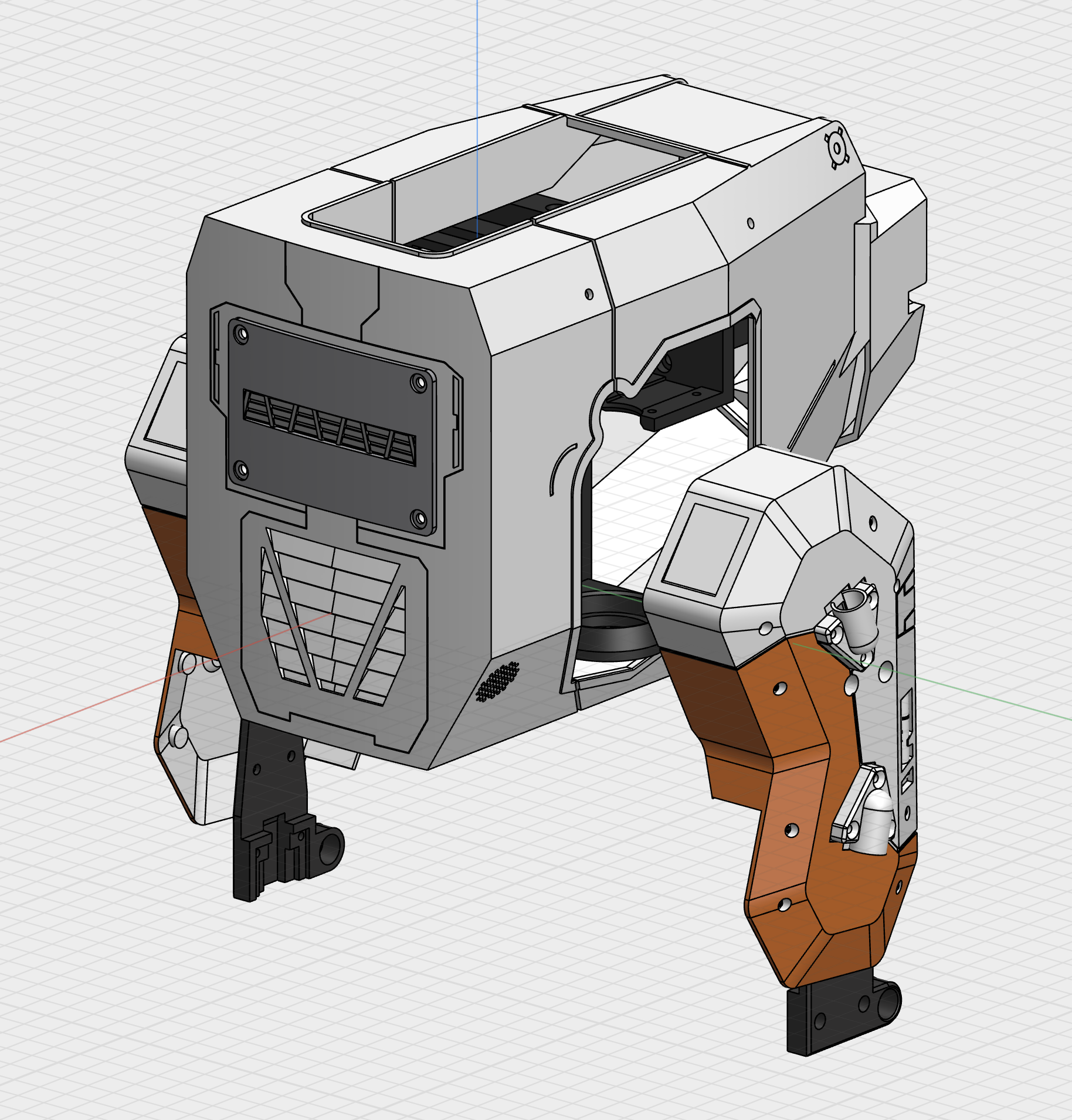
Open Duck Mini v2是一个旨在复刻迪士尼BDX Droid机器人的开源迷你版本项目,整机高度约42厘米(腿部伸展状态),物料清单总成本控制在400美元以内。项目核心目标是打造一个低成本、可复现的双足机器人平台,让开发者、机器人爱好者和研究者都能亲手构建并训练自己的行走机器人。
项目特点
**迷你复刻**:精确复刻迪士尼BDX机器人,高度约42厘米,成本可控。
**强化学习驱动**:使用强化学习训练行走策略,并成功实现从仿真到真实机器人的迁移(sim2real)。
**完整开源**:提供完整的CAD设计、BOM、固件代码和训练脚本。
**社区活跃**:拥有活跃的Discord社区,提供技术支持和交流。
**持续更新**:项目仍在积极开发中,包括表情功能(LED眼睛、摄像头、扬声器、麦克风)等未来特性。
技术规格
| 高度 | 约42厘米(腿部伸展时) |
|---|---|
| 目标成本 | < 400美元 |
| 主控制器 | Raspberry Pi Zero 2W |
| 仿真环境 | MuJoCo / Mujoco Playground |
| 强化学习框架 | 基于ONNX的推理模型 |
| 机械设计 | Onshape CAD |
| 执行器识别 | Rhoban BAM |
| 社区 | Discord |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印部件 | 1套 | — | 详见打印指南 |
| Raspberry Pi Zero 2W | 1 | — | 主控制器 |
| 伺服电机 | 待定 | — | 详见BOM表 |
| 电池 | 1 | — | 详见BOM表 |
| 其他电子元件 | 1套 | — | 详见BOM表 |
| 螺丝、线材等 | 1套 | — | 详见BOM表 |
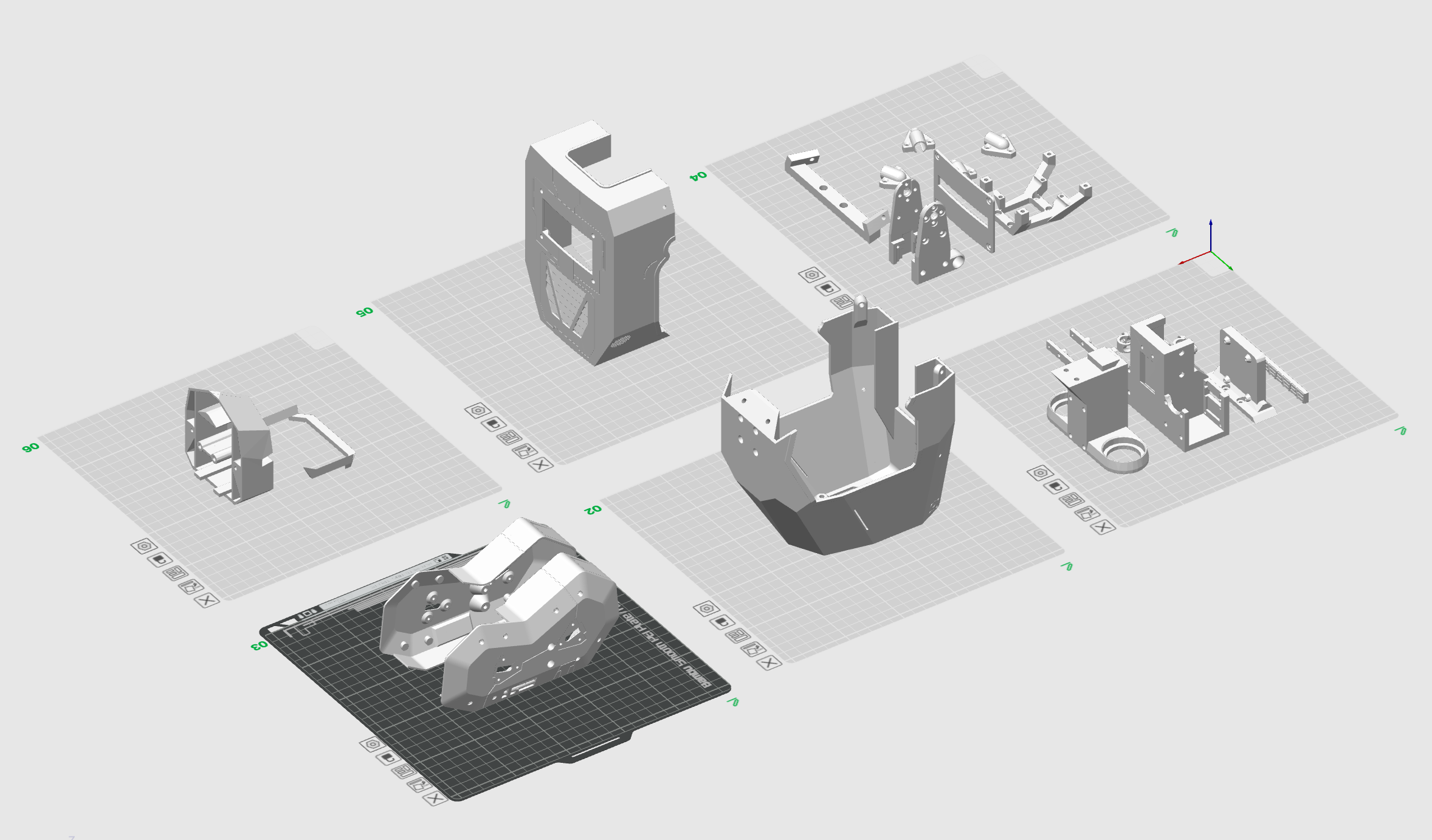
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 4/5
🔵 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库





视频
所需技能
🔧 **动手能力**:需要熟练的3D打印、电子焊接、机械组装能力,能够处理精细的机械结构和电子布线。
💻 **编程能力**:需要Python编程基础,能够运行和修改强化学习训练脚本,理解ONNX模型推理。熟悉Linux系统操作。
⚡ **电子电路**:需要基本的电路知识,能够连接伺服电机、传感器和树莓派,理解电源管理。
适用场景
**机器人爱好者**:适合对双足机器人、强化学习感兴趣的爱好者进行学习和实践。
**开源硬件项目**:作为开源机器人项目的参考,学习从设计到制造的全流程。
**AI/RL研究**:作为强化学习sim2real研究的低成本硬件平台。
**教育展示**:可用于机器人技术、人工智能课程的教学演示。