FSGP-BGK 实时时空可通行性评估
FSGP_BGK
智能硬件
1/5
🧩 软硬件结合
已发布

项目简介
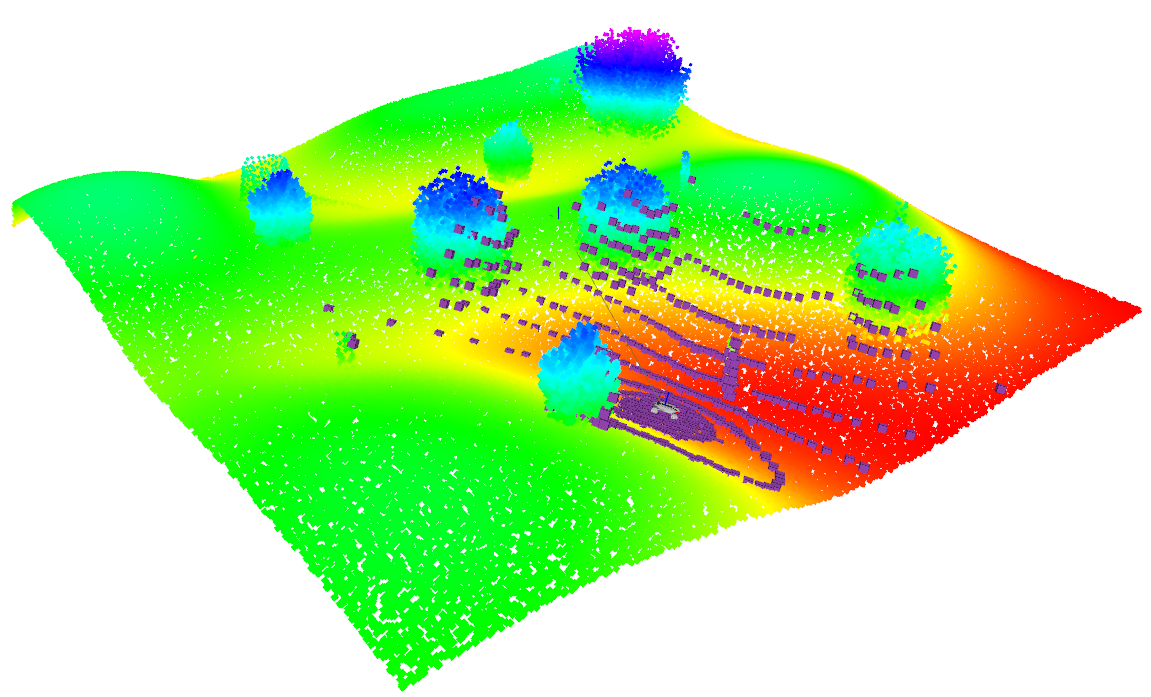
基于特征稀疏高斯过程的实时时空可通行性评估。
FSGP-BGK 是一个面向地面移动机器人在非结构化户外环境中进行实时地形可通行性评估的开源项目,相关论文已被 IROS 2025 接收为口头报告。该项目核心解决的是传统地形分析方法在复杂动态场景下精度不足、实时性差的问题,通过创新的时空融合建模,让机器人能够自主判断前方地形是否适合通行。
项目特点
基于稀疏高斯过程的几何特征提取,直接从点云中获取曲率、坡度、高程等关键地形参数
时空贝叶斯高斯核推理方法,动态融合历史与实时数据评估可通行性
GPU 加速特征提取,实现实时性能
提供完整的 ROS1/ROS2 仿真环境,支持键盘控制
集成自主导航框架,已在差速驱动车辆上验证
开源实现,包含感知模块和仿真环境
技术规格
| 算法核心 | 稀疏高斯过程 (SGP) + 贝叶斯高斯核 (BGK) |
|---|---|
| 输入数据 | 点云扫描 (Point Cloud) |
| 输出 | 高分辨率局部可通行性地图 |
| 支持 ROS 版本 | ROS1 Noetic / ROS2 Humble |
| GPU 加速 | 支持 (CUDA) |
| 编程语言 | Python |
| 主要依赖 | PyTorch, GPyTorch, Open3D, CuPy |
| 论文状态 | IROS 2025 Oral |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ROS1 Noetic 或 ROS2 Humble | 1 | — | 操作系统依赖 |
| Python 3.x | 1 | — | 运行环境 |
| CUDA 11.x | 1 | — | GPU 加速 |
| PyTorch | 1 | — | 深度学习框架 |
| GPyTorch | 1 | — | 高斯过程库 |
| Open3D | 1 | — | 点云处理 |
| CuPy | 1 | — | GPU 计算 |
| 带 GPU 的计算机 | 1 | — | 推荐 NVIDIA GPU |
| 差速驱动移动机器人 | 1 | — | 用于真实环境验证 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 5/5
🔵 动手与操作: 2/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库

所需技能
🔧 **动手能力**:需要能够搭建和配置 ROS 环境,安装依赖库,运行仿真和真实机器人实验
💻 **编程能力**:需要 Python 编程能力,理解 PyTorch、GPyTorch 等深度学习框架,能够修改配置文件和参数
⚡ **电子电路**:真实机器人部署需要基本的电路连接和传感器配置知识
适用场景
户外非结构化环境中的地面移动机器人自主导航
复杂地形(如丘陵、碎石路、草地等)的可通行性评估
需要实时地形分析的搜索救援、农业巡检、物流运输等任务
机器人领域学术研究,特别是可通行性评估和自主导航方向