搜索 "mapping" 找到 16 个结果
Cartographer提供2D和3D实时SLAM,支持多平台。
LIO-SAM:紧耦合激光雷达惯性里程计,通过平滑与建图实现。
LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
Laser Odometry and Mapping (Loam) is a realtime method for state estimation and mapping using a 3D lidar.
RTAB-Map库及独立应用。
An Iterative Closest Point (ICP) library for 2D and 3D mapping in Robotics
loam code noted in Chinese(loam中文注解版)
GLIM: versatile and extensible point cloud-based 3D localization and mapping framework
[IEEE ICRA'23] A new lightweight LiDAR-inertial odometry algorithm with a novel coarse-to-fine approach in constructing
[IEEE RA-L & ICRA'22] A lightweight and computationally-efficient frontend LiDAR odometry solution with consistent and a
slam_gmapping:基于ROS的激光SLAM建图包。
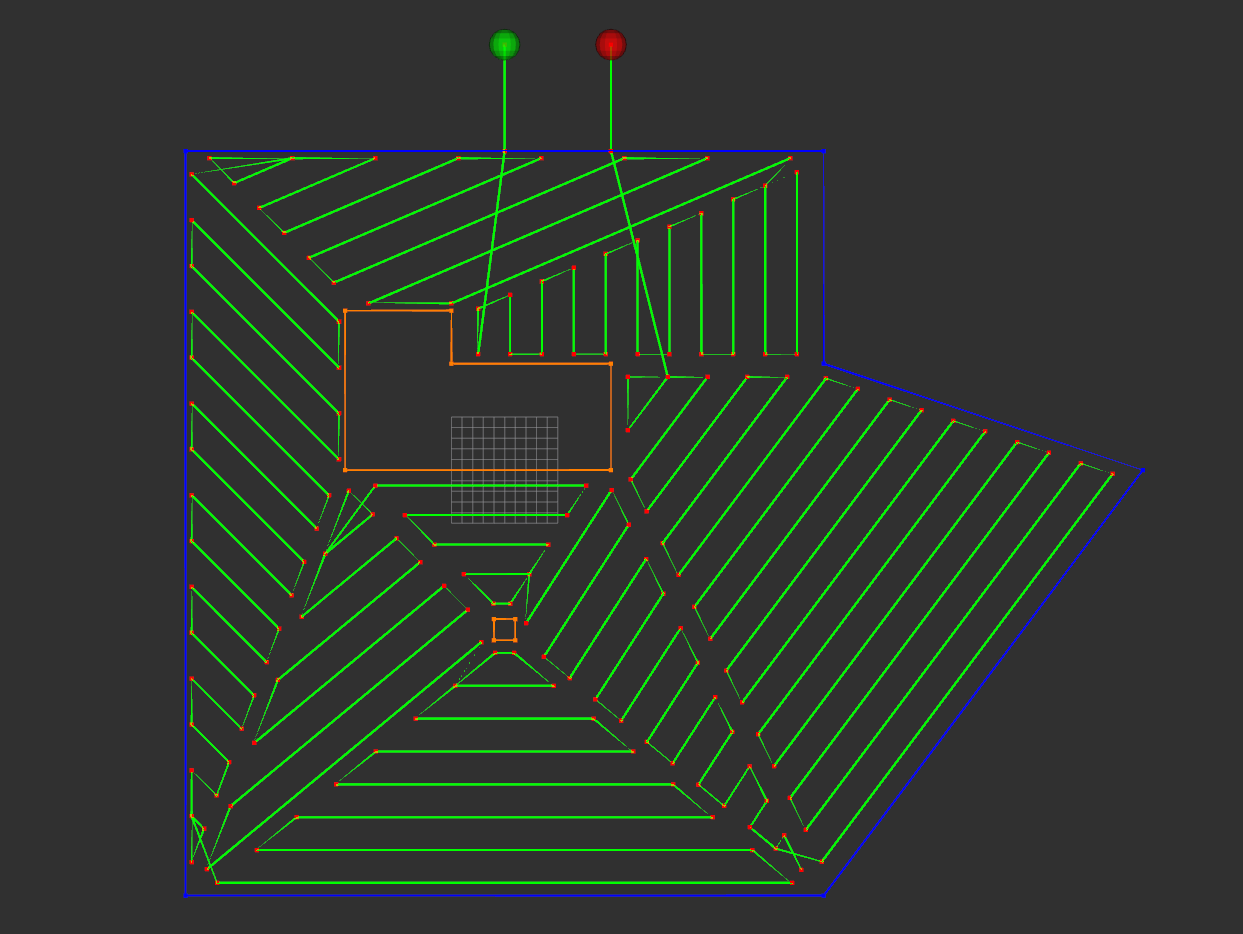
Coverage planning in general polygons with holes.
A Modular Optimization framework for Localization and mApping (MOLA)
A Robust Approach for LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Modular open-source brain for legged robots. Web UI for teleops, autonomous navigation, mapping & monitoring. 3D-printab
Ackerman机器人基于Gazebo ROS,集成move_base、gmapping SLAM和TEB规划器。