待补充
PRBonn/rko_lio
智能家居, 机器人
3/5
🧩 软硬件结合
已发布
项目简介
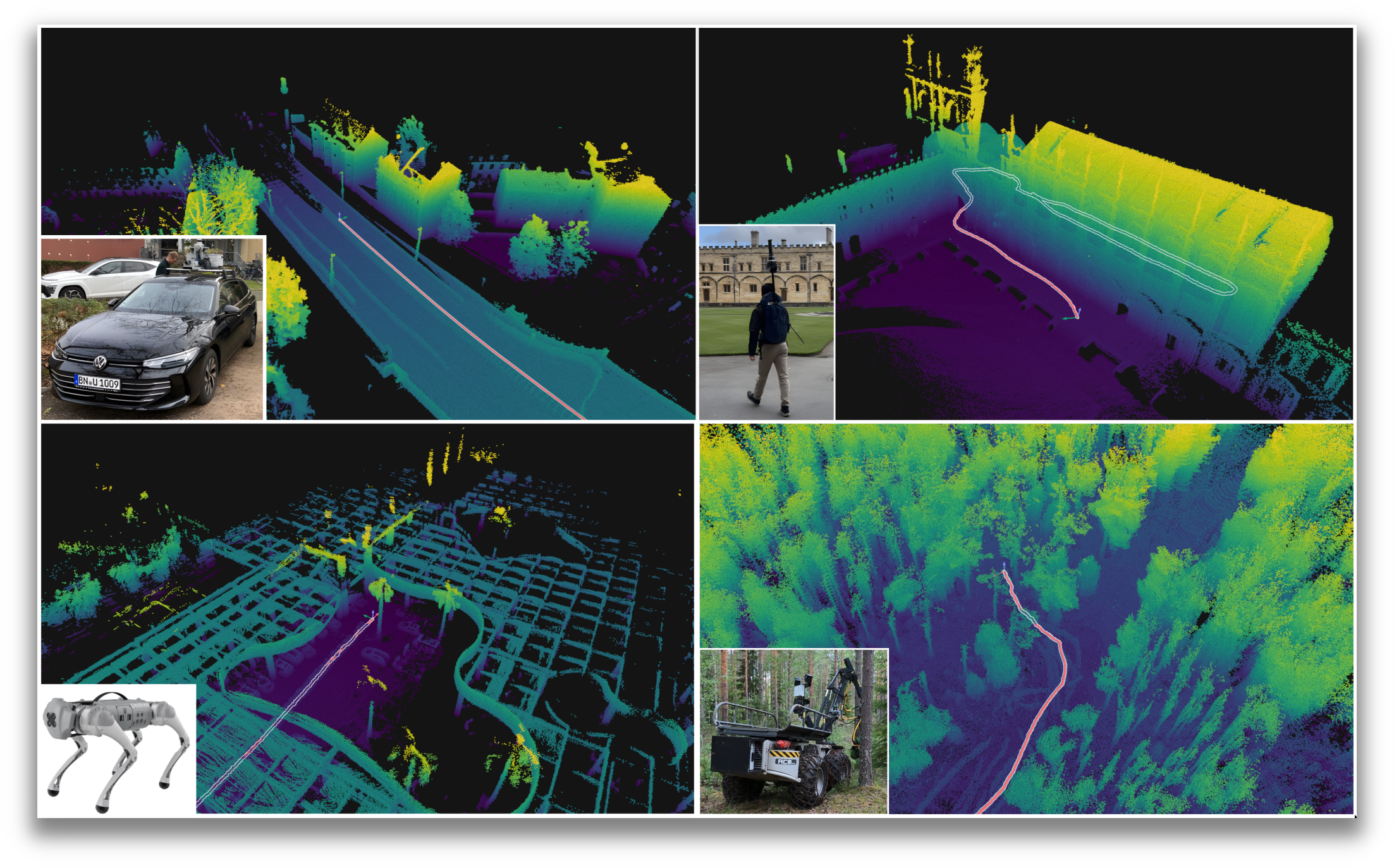
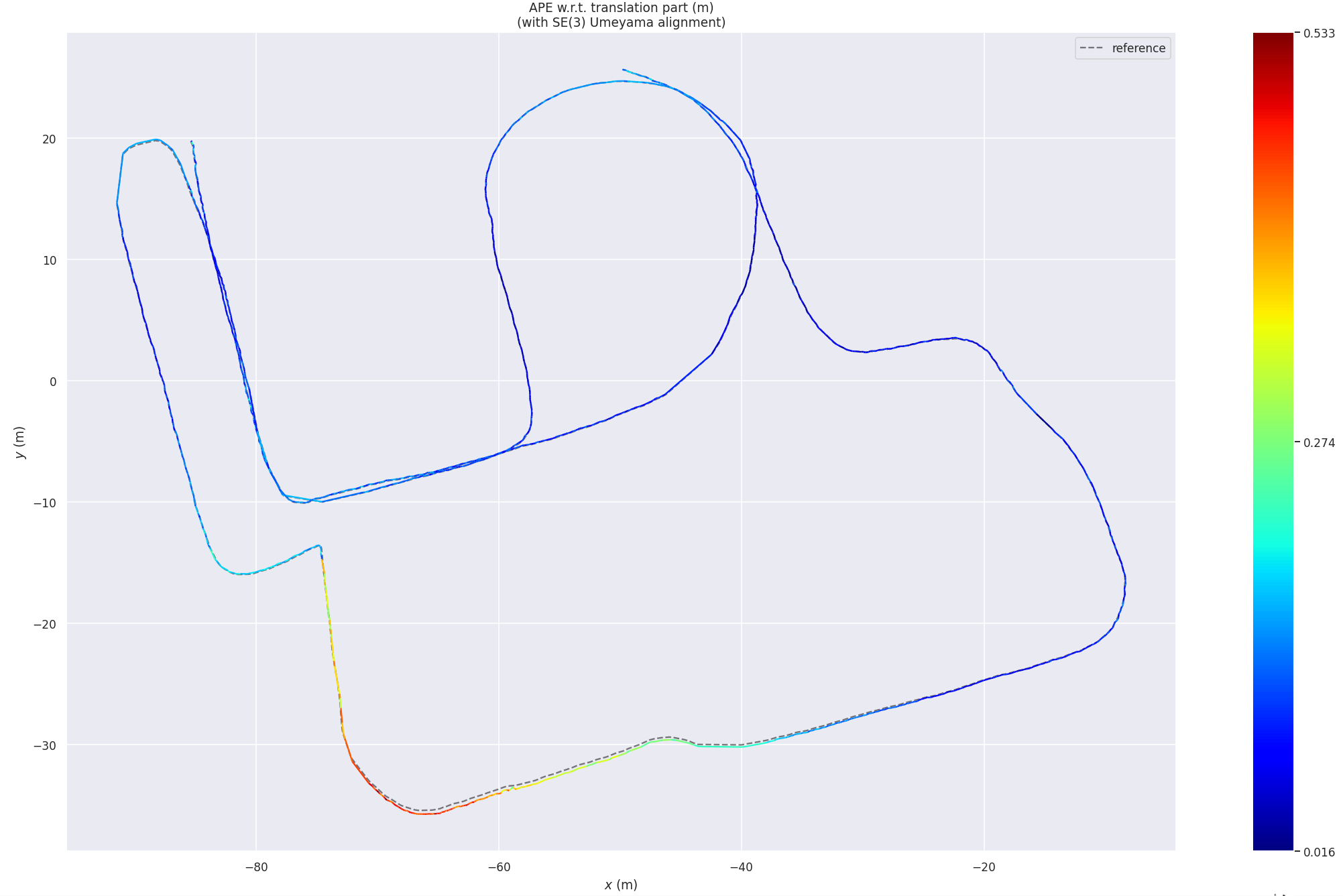
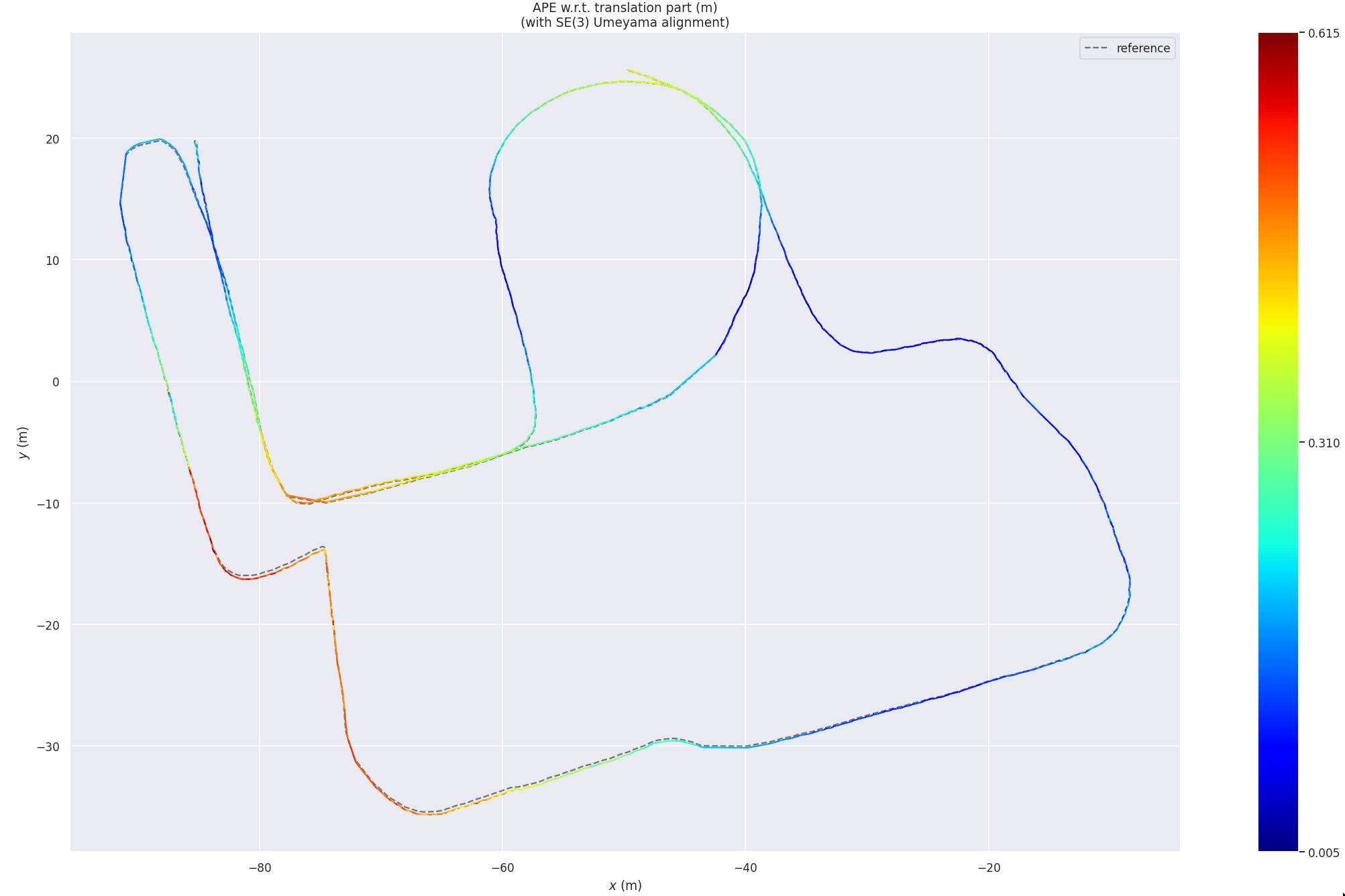
A Robust Approach for LiDAR-Inertial Odometry Without Sensor-Specific Modelling
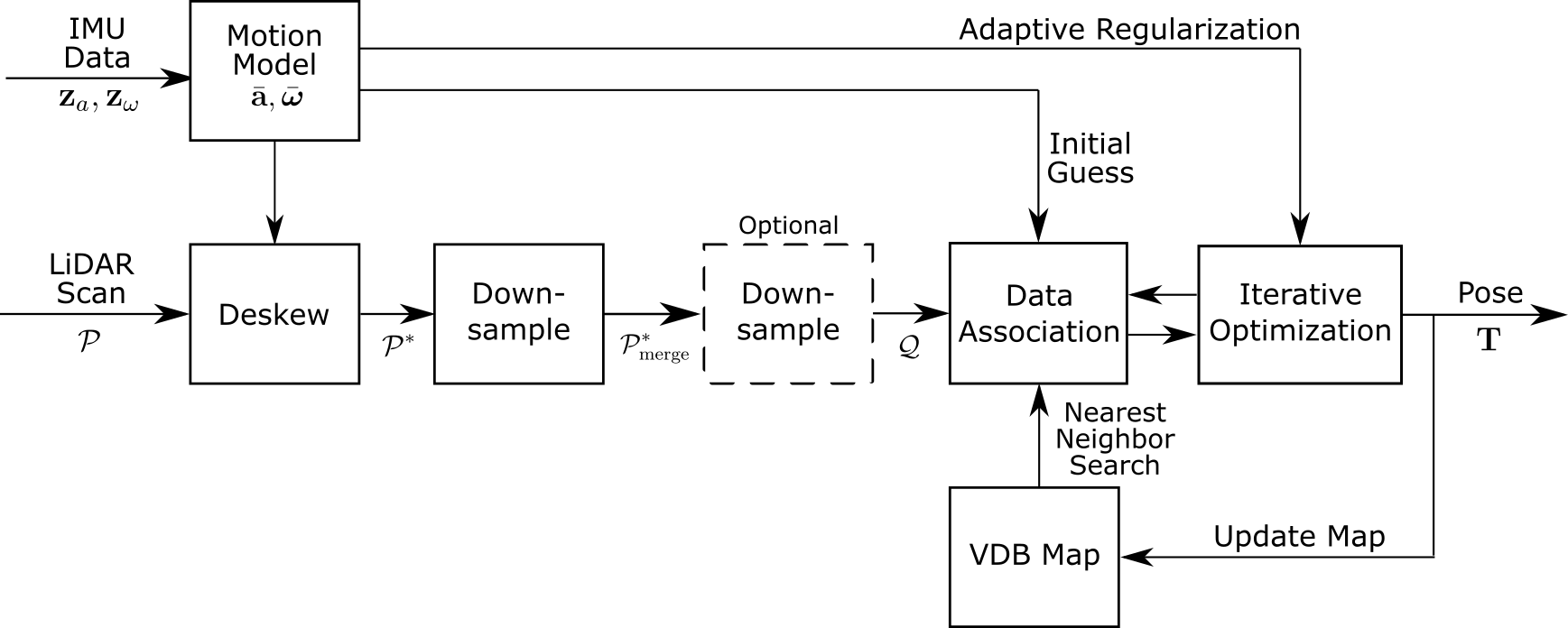
RKO-LIO是一个由波恩大学机器人研究组开发的鲁棒激光雷达-惯性里程计系统,其核心创新在于无需针对特定传感器进行建模即可实现高精度的定位与建图。该项目解决了传统激光雷达-惯性里程计方法需要针对不同传感器型号进行参数调整和模型适配的问题,提供了一种通用且鲁棒的解决方案。项目的主要特点包括:支持多种激光雷达和IMU传感器的即插即用,无需复杂的传感器标定和参数调整;提供Python和ROS两种使用方式,兼容ROS1和ROS2多个发行版;内置可视化工具,方便用户实时观察里程计运行效果。技术栈方面,RKO-LIO基于Python开发,利用rosbags库实现多格式数据包读取,通过rerun-sdk提供可视化支持,同时提供完整的ROS包安装方式。该项目适用于各类移动机器人的定位需求,包括但不限于四足机器人、轮式机器人、无人机等不同平台,在室内外多种环境下都能保持稳定的定位性能。用户可以通过pip快速安装Python版本,或通过apt安装ROS版本,使用简单的命令行即可运行。项目还提供了详细的文档和配置说明,方便用户根据实际需求调整参数。该工作已发表在IEEE RA-L期刊上,代码开源且持续维护更新。
标签
项目特点
**无需传感器建模**:核心创新在于不依赖特定传感器模型,通用性强,适配多种激光雷达和IMU。
**即插即用**:支持多种传感器组合,无需复杂标定和参数调整,开箱即用。
**多平台支持**:提供Python接口和ROS封装,兼容ROS1(Melodic/Noetic)和ROS2(Foxy/Galactic/Humble)。
**内置可视化**:集成rerun-sdk可视化工具,可实时观察里程计轨迹和点云建图效果。
**数据格式兼容**:利用rosbags库读取rosbag、ros2bag等多种格式数据包,方便回测。
**开源社区活跃**:由波恩大学机器人研究组维护,持续更新,文档和示例丰富。
技术规格
| Python 3.8+ | |
| rosbags, rerun-sdk, numpy, open3d | |
| ROS1 Melodic/Noetic, ROS2 Foxy/Galactic/Humble | |
| 机械旋转式、固态式(如Velodyne、Ouster、Livox等) | |
| 6轴/9轴IMU(通用接口) | |
| rosbag, ros2bag, .pcd, .bin | |
| 与传感器输入频率一致(典型10-20Hz) | |
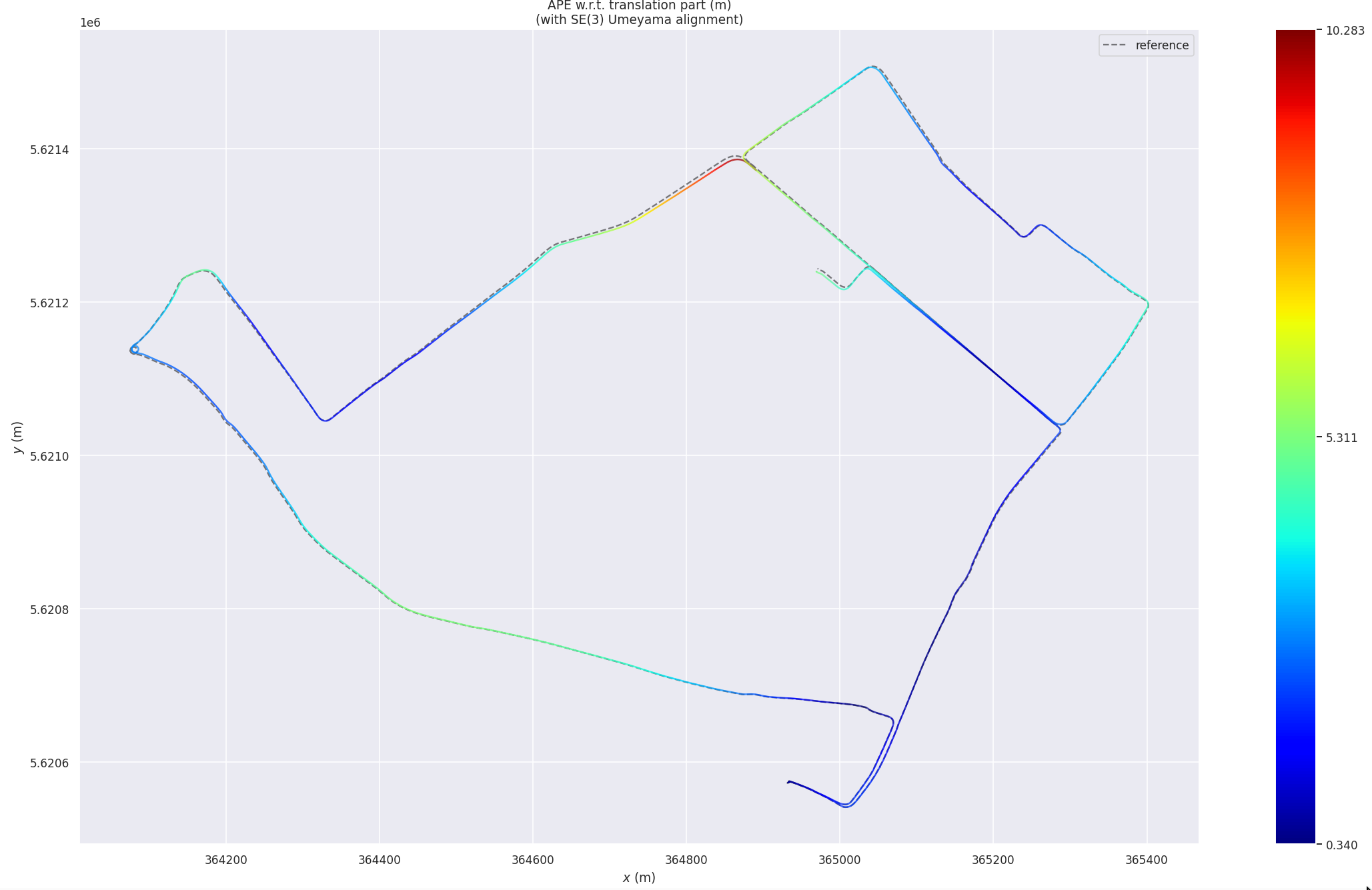
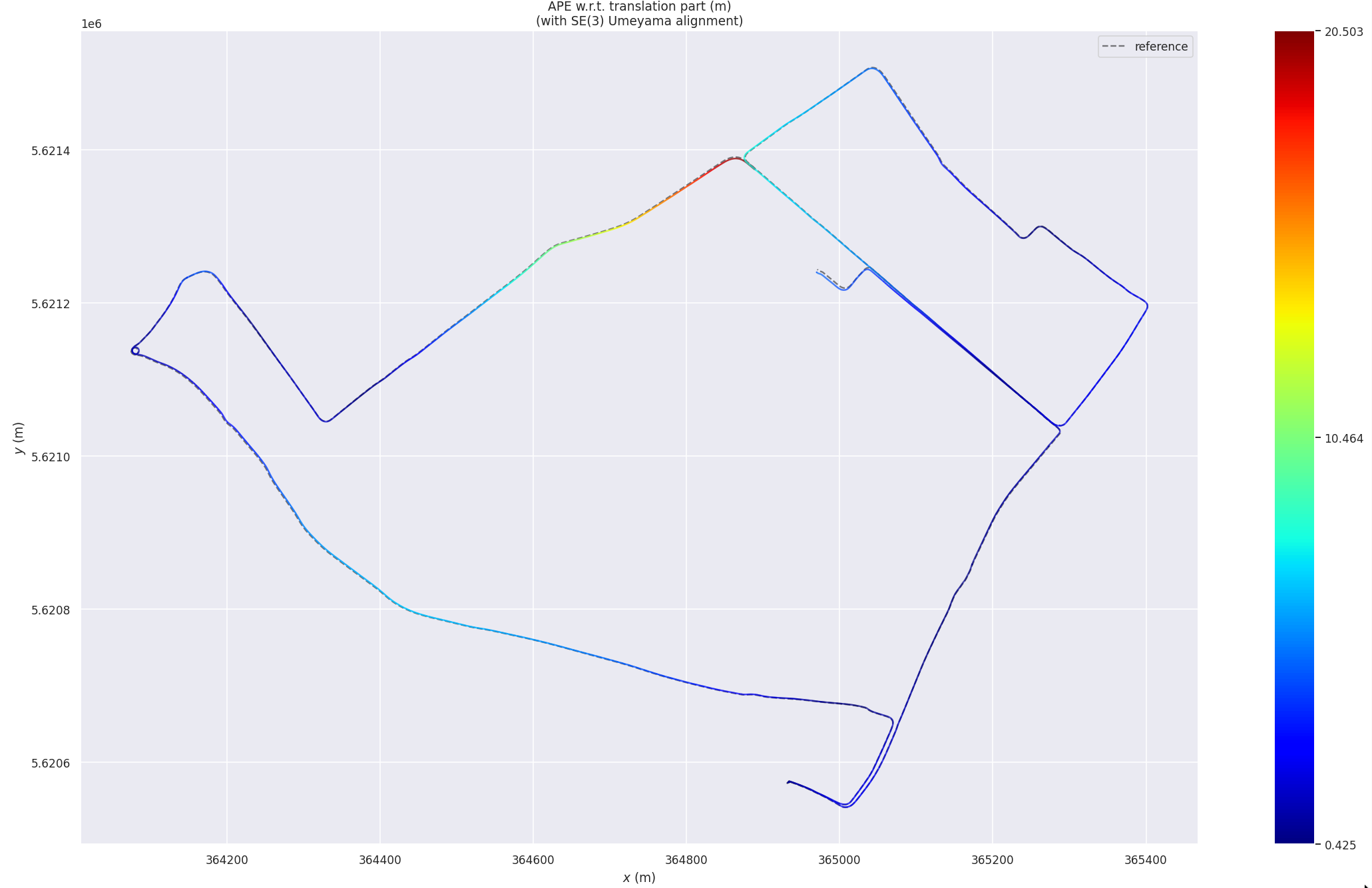
| 典型场景下平移误差<0.5%,旋转误差<0.1°(公开数据集测试) | |
| 支持实时运行(取决于传感器数据量) | |
| Ubuntu 18.04/20.04/22.04, macOS, Windows(WSL2) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 激光雷达(如Velodyne VLP-16) | 1 | — | 任意型号,无需标定 |
| IMU(如BMI088) | 1 | — | 6轴或9轴,通用接口 |
| 计算平台(如NVIDIA Jetson Orin) | 1 | — | 推荐4GB以上内存 |
| 电源模块 | 1 | — | 根据传感器供电需求 |
| 数据线/转接板 | 若干 | — | USB/以太网连接 |
| Ubuntu 20.04/22.04 | 1 | — | 操作系统 |
| ROS1 Noetic 或 ROS2 Humble | 1 | — | 按需选择 |
| Python 3.8+ | 1 | — | 开发环境 |
| rosbags库 | 1 | — | 数据读取依赖 |
| rerun-sdk | 1 | — | 可视化依赖 |
能力画像
**记忆与知识检索**:2/5 — 项目不涉及知识库或检索功能,主要依赖传感器实时数据。
**动手与操作**:4/5 — 需要搭建硬件平台、连接传感器、配置环境,有一定动手要求。
**编程与算法**:4/5 — 核心算法基于Python,涉及SLAM、滤波、点云处理,需要一定编程能力进行二次开发。
**设计与建模**:3/5 — 无需传感器建模,但需要理解系统架构和参数调优。
**实验与调试**:4/5 — 需要采集数据、调试参数、分析轨迹精度,实验环节较多。
**协作与分享**:3/5 — 开源项目,支持Fork和PR,但社区规模中等,协作以GitHub为主。
**学习与研究**:5/5 — 适合研究SLAM、传感器融合、机器人定位,论文和代码完整,学习价值高。
**系统集成**:3/5 — 可集成到ROS机器人系统,但需要适配传感器驱动和通信接口。
项目图库




所需技能
Python编程基础
ROS(机器人操作系统)基本使用(可选但推荐)
激光雷达和IMU的基本原理
SLAM/里程计算法基础
Linux命令行操作
Git版本控制
传感器数据采集与处理经验
适用场景
移动机器人自主导航中的实时定位与建图
无人机、无人车在复杂环境下的鲁棒里程计估计
多传感器融合算法研究与教学实验
工业AGV/AMR的即插即用定位方案
激光雷达-惯性SLAM算法的快速原型验证
机器人竞赛或科研项目中需要高精度定位的场景