搜索 "environment" 找到 31 个结果
(⌐■_■) - Deep Reinforcement Learning instrumenting bettercap for WiFi pwning.
A minimalist environment for decision-making in autonomous driving
A fully open-source humanoid arm for physical AI research and deployment in contact-rich environments.
A C++ bare metal environment for Raspberry Pi with USB (32 and 64 bit)
PyBullet Gymnasium environments for single and multi-agent reinforcement learning of quadcopter control
The open source research environment for AI researchers to seamlessly train, evaluate, and scale models from local hardw
A plugin for GTAV that transforms it into a vision-based self-driving car research environment.
Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments
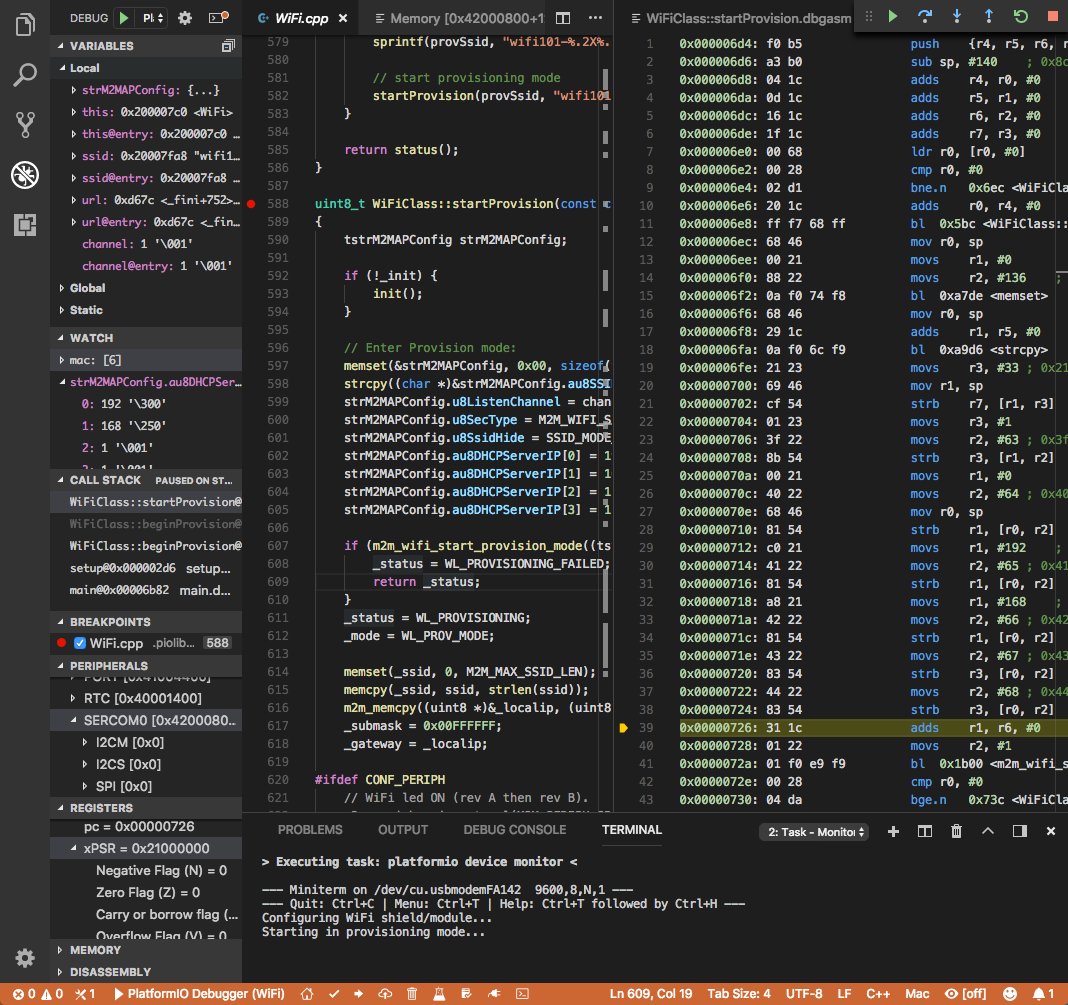
PlatformIO IDE for VSCode: The next generation integrated development environment for IoT
3D Trajectory Planner in Unknown Environments
Dynamics and Domain Randomized Gait Modulation with Bezier Curves for Sim-to-Real Legged Locomotion.
hector_slam 提供ROS包,用于非结构化环境(如Ur)中的SLAM。
Build environment and train a robot arm from scratch (Reinforcement Learning)
MyoSuite is a collection of environments/tasks to be solved by musculoskeletal models simulated with the MuJoCo physics
OpenAI Gym environments for an open-source quadruped robot (SpotMicro)
jMuxer - a simple javascript mp4 muxer that works in both browser and node environment.
Home automated terrarium/aquarium or other enclosed environment with a Raspberry Pi
MIT mini cheetah四足机器人在pybullet环境用ros模拟。
The Hailo Model Zoo includes pre-trained models and a full building and evaluation environment
Doosan robotic arm, simulation, control, visualization in Gazebo and ROS2 for Reinforcement Learning.