待补充
MyoHub/myosuite
3/5
🧩 软硬件结合
已发布
项目简介
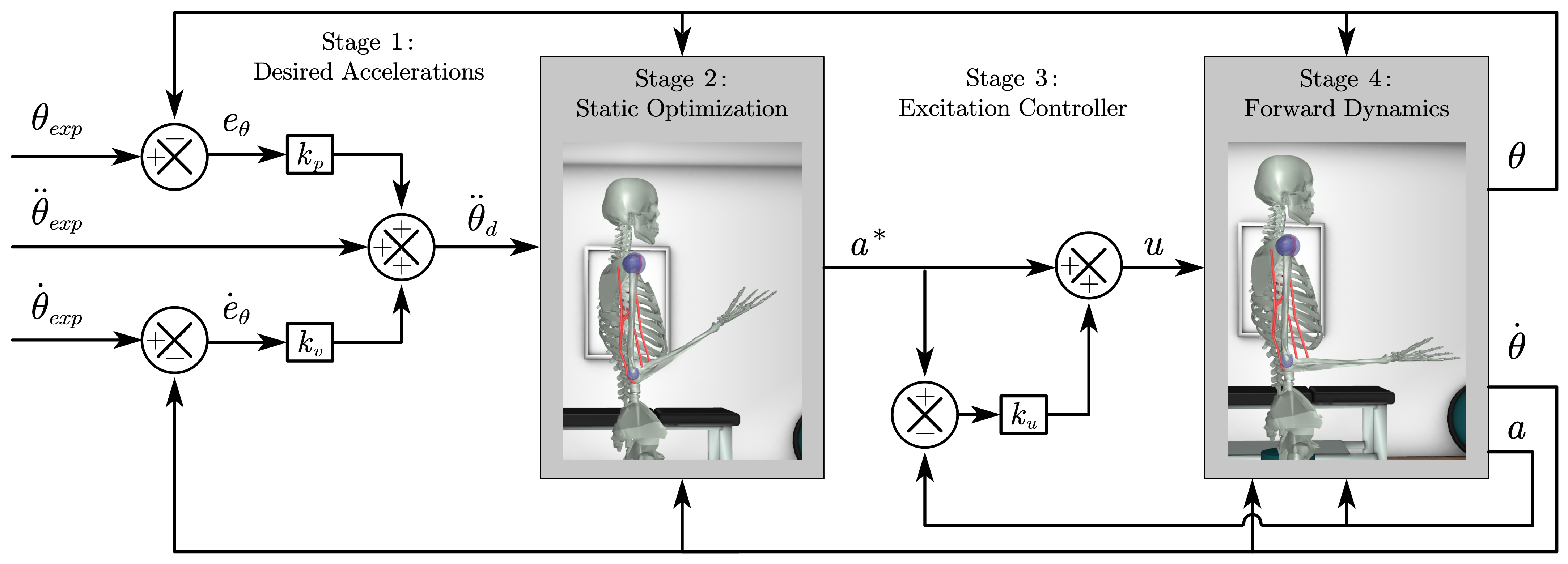
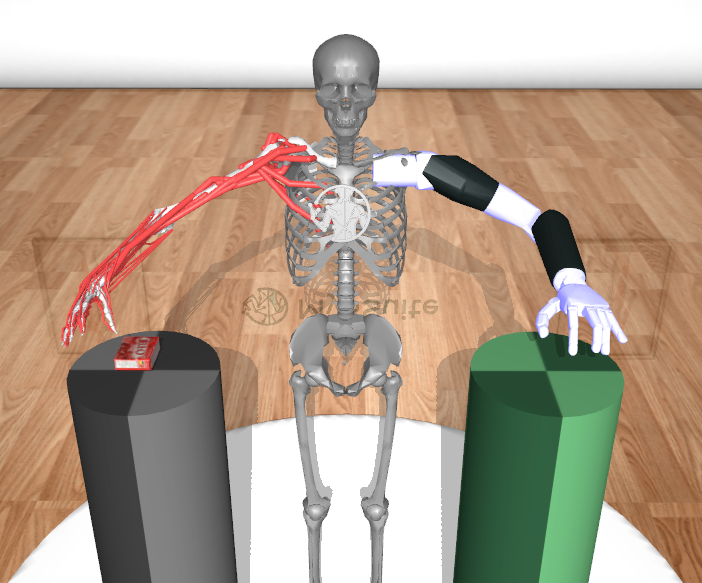
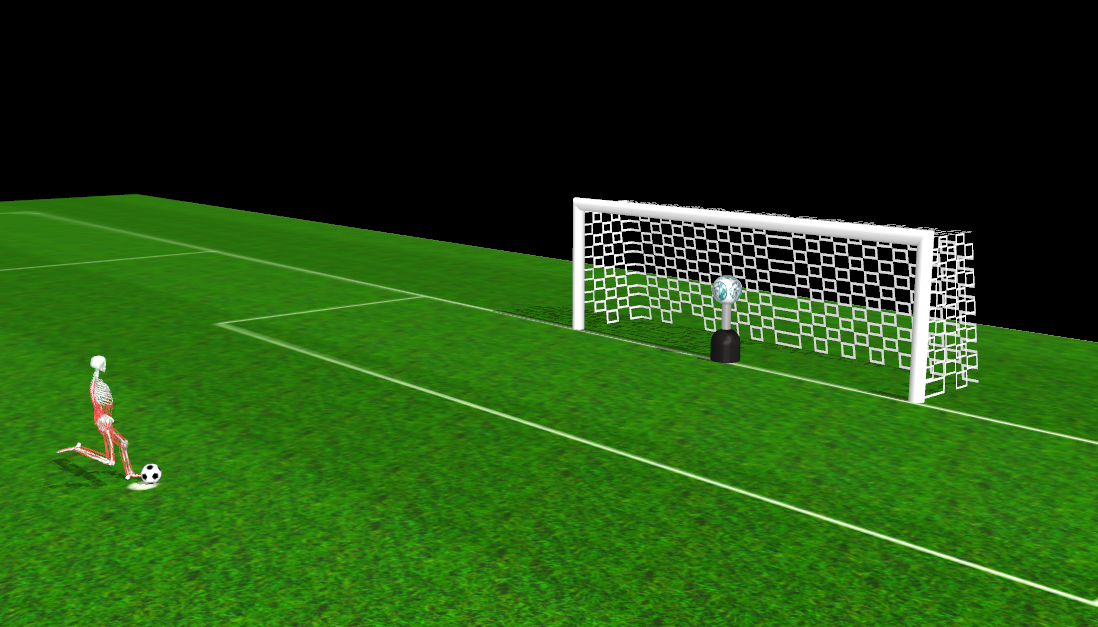
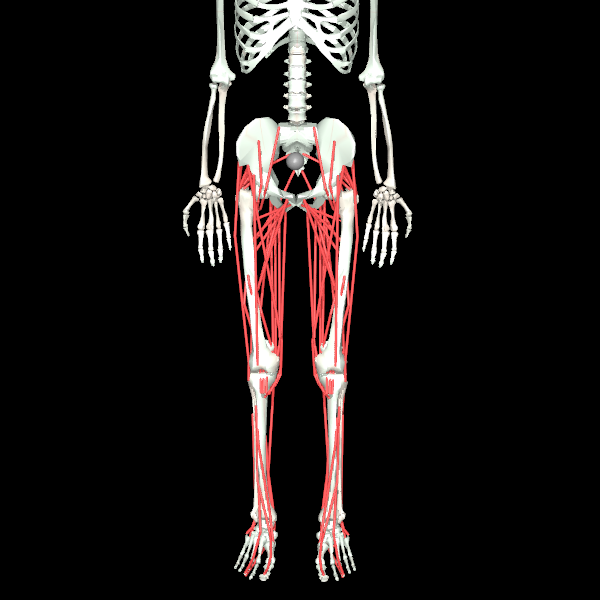
MyoSuite is a collection of environments/tasks to be solved by musculoskeletal models simulated with the MuJoCo physics
MyoSuite是一个专注于生物力学控制问题的开源强化学习环境集合,由Vikash Kumar和Vittorio Caggiano共同创建。该项目基于MuJoCo物理引擎进行肌肉骨骼系统的仿真,并采用OpenAI Gym标准API封装,使得机器学习研究人员可以方便地将先进的强化学习算法应用于生物力学控制任务中。MyoSuite的核心功能在于提供了一系列模拟人体关节和肌肉运动的仿真环境,包括肘部姿态控制、手部抓取、腕部运动等多种任务场景。这些环境不仅模拟了骨骼的运动学特性,还精确建模了肌肉的动力学行为,包括肌肉的激活、力-长度关系、力-速度关系等生理特性。技术栈方面,MyoSuite主要基于Python 3.10及以上版本,依赖MuJoCo物理引擎和OpenAI Gym接口,支持通过pip、conda或uv进行快速安装部署。项目解决了传统机器人控制研究中缺乏生物力学真实性的问题,为研究人员提供了一个能够模拟人体运动控制复杂性的标准化测试平台。MyoSuite的适用场景非常广泛,包括但不限于:康复机器人控制策略研究、假肢控制算法开发、运动生物力学分析、神经肌肉控制机制探索,以及人机交互中的运动规划等。项目还提供了详细的文档、教程和基线算法,降低了入门门槛,同时支持Colab在线运行,方便快速上手实验。
标签
项目特点
基于 MuJoCo 物理引擎,提供高精度的肌肉骨骼系统仿真
采用 OpenAI Gym 标准 API 封装,兼容主流强化学习框架
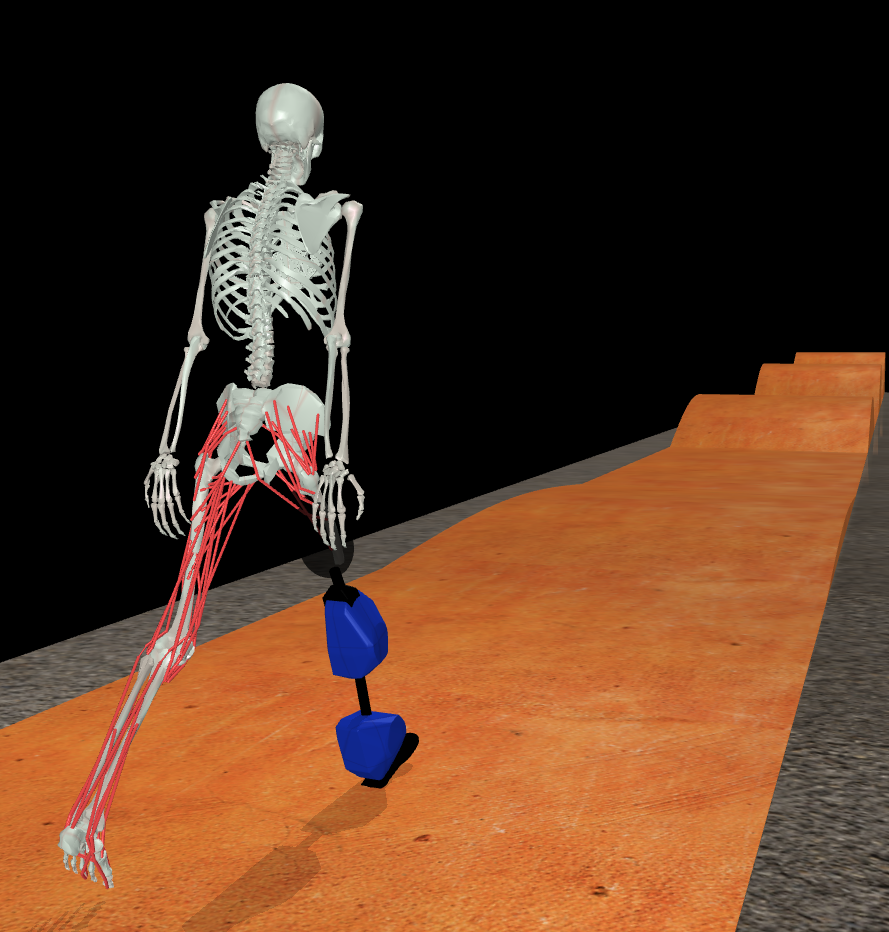
包含多种生物力学任务场景,如肘部控制、手部抓取、腕部运动等
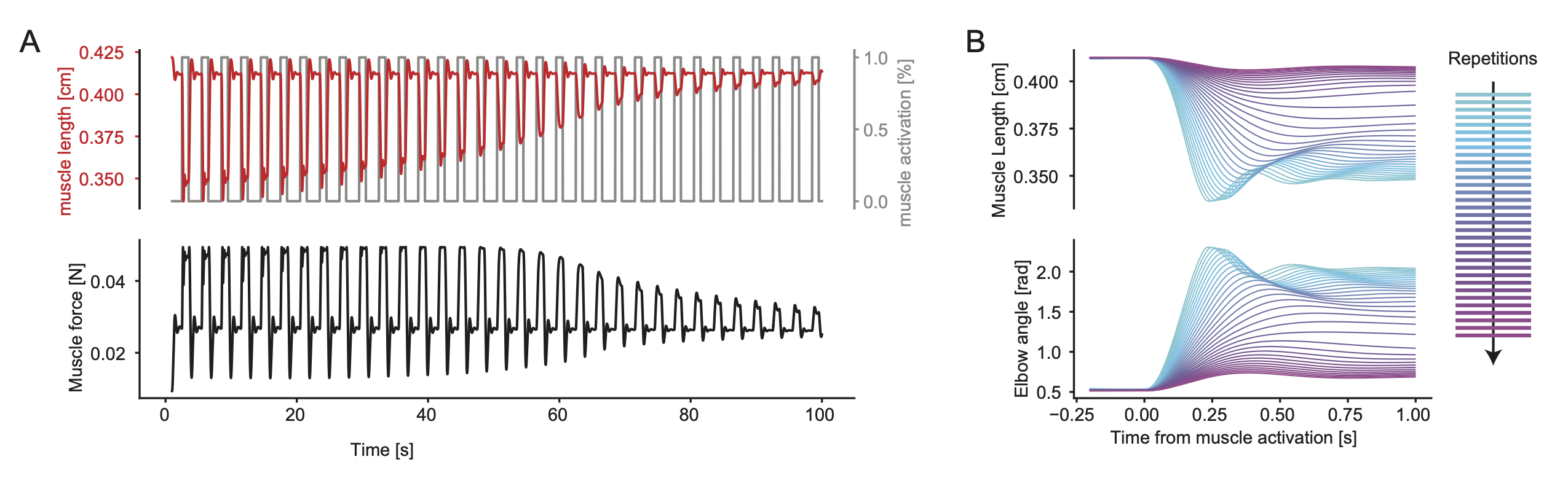
精确建模肌肉动力学行为,包括激活、力-长度和力-速度关系
支持与主流强化学习算法库(如 Stable-Baselines3)无缝集成
开源社区活跃,提供丰富的示例和文档
技术规格
| 物理引擎 | MuJoCo(版本 ≥ 2.1.0) |
|---|---|
| API 标准 | OpenAI Gym(版本 ≥ 0.21.0) |
| 编程语言 | Python 3.7+ |
| 核心依赖 | numpy, mujoco, gym, dm_control |
| 操作系统支持 | Linux, macOS, Windows |
| 任务环境数量 | 10+(包括 elbow, hand, wrist 等) |
| 肌肉模型 | 基于 Hill-type 肌肉模型 |
| 仿真步长 | 默认 0.01 秒 |
| 渲染方式 | MuJoCo 内置渲染器 |
| 许可证 | 待确认(仓库未明确标注) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| myosuite | 1 | — | 主环境包 |
| mujoco | 1 | — | 版本 ≥ 2.1.0 |
| gym | 1 | — | 版本 ≥ 0.21.0 |
| dm_control | 1 | — | 用于底层控制 |
| numpy | 1 | — | 基础数学库 |
| matplotlib | 1 | — | 可选,用于绘图 |
| stable-baselines3 | 1 | — | 可选,用于训练示例 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识库或检索功能,但文档和论文提供了生物力学背景知识。
**动手与操作**:3/5 — 需要用户具备安装依赖、配置环境的基本动手能力,但无需硬件操作。
**编程与算法**:5/5 — 核心能力要求,用户需掌握 Python 编程和强化学习算法实现。
**设计与建模**:4/5 — 用户可自定义任务环境和奖励函数,涉及生物力学建模。
**实验与调试**:4/5 — 需要调试训练过程、调整超参数、分析仿真结果。
**协作与分享**:3/5 — 支持 GitHub 协作,可提交 PR 和 Issue,但社区规模中等。
**学习与研究**:5/5 — 非常适合生物力学与强化学习交叉领域的研究与学习。
**系统集成**:3/5 — 可与 Stable-Baselines3 等框架集成,但与其他系统对接需额外开发。
项目图库



所需技能
Python 编程基础
强化学习基础知识(如 PPO、SAC 等算法)
基本的生物力学或机器人学概念
命令行操作与包管理(pip、conda)
版本控制(Git 基础)
数据分析与可视化(NumPy、Matplotlib)
英文文档阅读能力
适用场景
生物力学控制算法的研究与验证
肌肉骨骼系统仿真与运动分析
强化学习在连续控制任务中的教学与实验
康复机器人控制策略的仿真测试
人体运动科学领域的学术研究
机器人灵巧操作算法的迁移学习研究
高校研究生课程项目与毕业设计