OpenArm
openarm
机器人
3/5
🧩 软硬件结合
已发布
项目简介
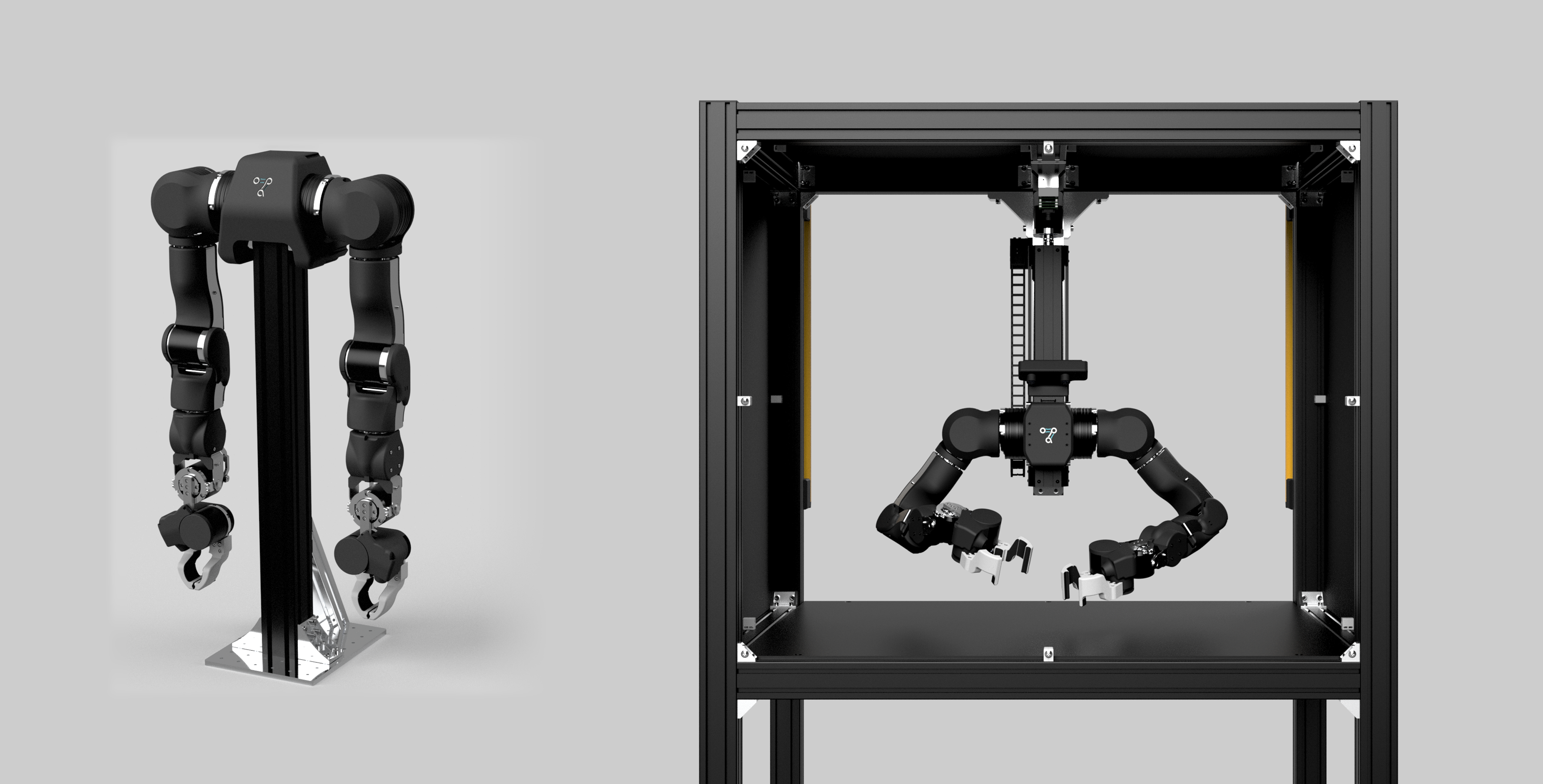
A fully open-source humanoid arm for physical AI research and deployment in contact-rich environments.
OpenArm 是一个开源的人形机械臂项目,拥有7个自由度,专为物理人工智能研究和在接触密集环境中的部署而设计。其核心优势在于高反向驱动性和柔顺性,这使得它能够安全地与人类进行交互,同时具备处理实际任务的负载能力。项目不仅提供了机械臂本身,还配套设计了“OpenArm Cell”——一个标准化的实验环境,具备统一的背景、照明和摄像头布局。这意味着全球的研究人员都可以在完全一致的条件下复现实验,从而推动物理人工智能研究水平的全球性讨论与比较。
标签
项目特点
**完全开源**:硬件、软件、仿真和数据集全部开源,遵循 CERN-OHL-S-2.0 和 Apache-2.0 等开源许可证。
**高柔顺性与安全性**:专为安全的人机交互设计,具备高反向驱动性,适合接触密集型任务。
**标准化评估环境**:提供 OpenArm Cell 标准化环境,确保全球研究结果的可复现性。
**多平台支持**:支持 ROS2、Isaac Lab、MuJoCo 等多种仿真和开发平台。
**丰富的软件栈**:包含遥操作、数据采集、模仿学习、CAN 控制等完整软件包。
**社区驱动**:活跃的 Discord 社区,持续寻求贡献者、研究伙伴和公司合作。
技术规格
| 自由度 | 7 DOF |
|---|---|
| 类型 | 人形机械臂 |
| 主要应用 | 物理AI研究、接触密集型任务、遥操作、模仿学习 |
| 成本 | 约 6,500 美元(完整双臂系统) |
| 硬件许可证 | CERN-OHL-S-2.0 |
| 软件许可证 | Apache-2.0 |
| 仿真支持 | Isaac Lab, MuJoCo |
| 控制接口 | CAN, ROS2 |
| 数据格式 | 自定义数据集格式,提供 Python API |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印/CNC零件 | 1套 | — | 详见硬件仓库 |
| 伺服电机/执行器 | 7 | — | 具体型号待采集 |
| 电机驱动器 | 7 | — | 具体型号待采集 |
| CAN 接口板 | 1 | — | 具体型号待采集 |
| 线缆和连接器 | 1套 | — | 具体规格待采集 |
| 螺丝、螺母等 | 1套 | — | 具体规格待采集 |
3D 模型
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
🔵 狂热与坚持: 4/5
🔵 创造与创新: 4/5
项目图库

所需技能
🔧 **动手能力**:需要较强的机械组装和电子焊接能力,能够使用 3D 打印机和基本工具完成硬件组装。
💻 **编程能力**:需要具备 C++/Python 编程基础,熟悉 ROS2、CAN 总线通信和仿真环境(Isaac Lab/MuJoCo)的使用。
⚡ **电子电路**:需要了解电机驱动、CAN 总线通信和基本电路调试技能。
适用场景
**物理 AI 研究**:用于接触密集型任务的算法开发和验证。
**遥操作与模仿学习**:通过遥操作采集数据,训练机器人模仿人类动作。
**仿真与训练**:在 Isaac Lab 和 MuJoCo 等仿真环境中进行强化学习和策略训练。
**真实世界数据采集**:在标准化环境中采集高质量的操作数据,用于数据集构建。
**教育与培训**:作为开源平台,用于机器人学、控制理论和 AI 的教学。