搜索 "inertial-odometry" 找到 6 个结果
Kimera代码的索引仓库。
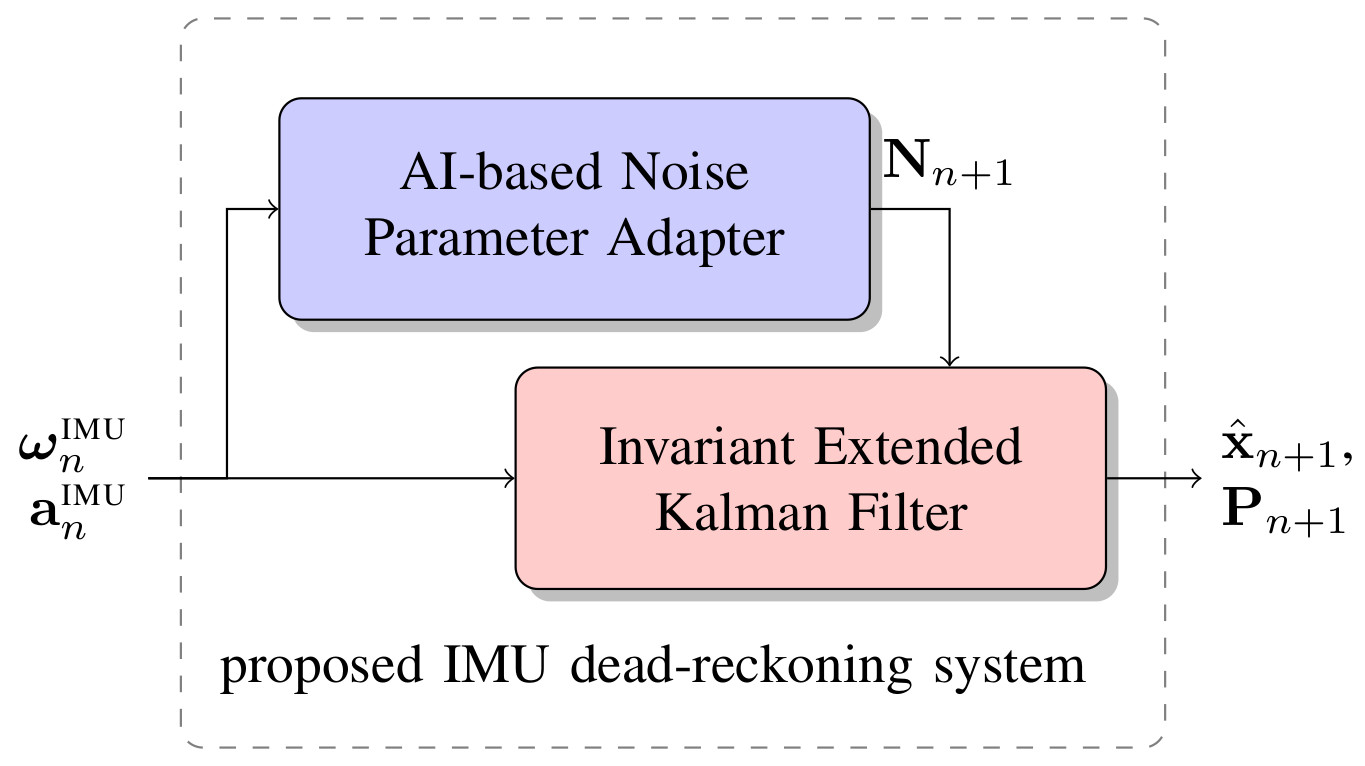
AI-IMU Dead-Reckoning
[IEEE ICRA'23] A new lightweight LiDAR-inertial odometry algorithm with a novel coarse-to-fine approach in constructing
[IEEE RA-L & ICRA'22] A lightweight and computationally-efficient frontend LiDAR odometry solution with consistent and a
LeGO-LOAM, LIO-SAM, LVI-SAM, FAST-LIO2, Faster-LIO, VoxelMap, R3LIVE, Point-LIO, KISS-ICP, DLO, DLIO, Ada-LIO, PV-LIO, S
A Robust Approach for LiDAR-Inertial Odometry Without Sensor-Specific Modelling