AI-IMU 惯性导航推算
ai-imu-dr
4/5
🧩 软硬件结合
已发布

项目简介
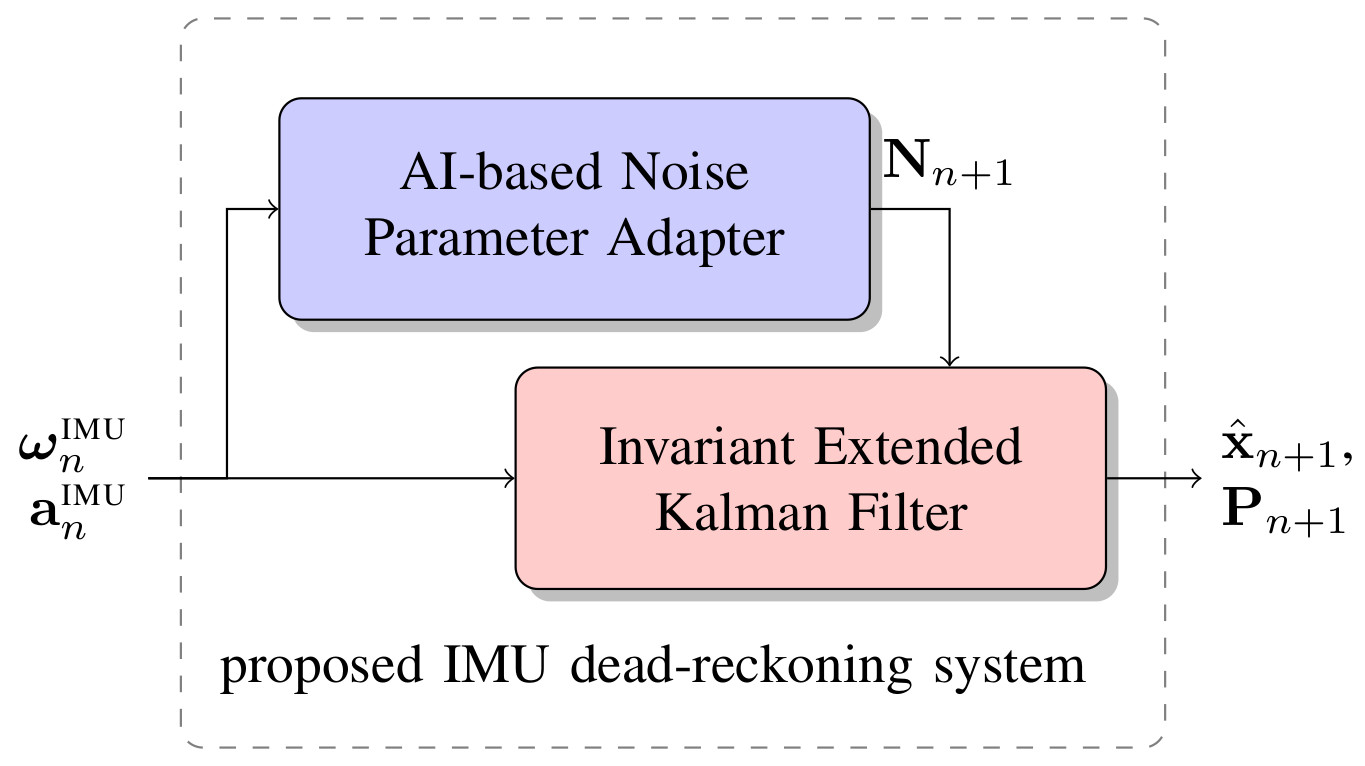
AI-IMU Dead-Reckoning
AI-IMU Dead-Reckoning 是一个专注于仅利用惯性测量单元(IMU)实现高精度车辆航位推算的开源项目。该项目由 MINES ParisTech 和 Safran 的研究人员共同开发,相关成果已发表在 IEEE Transactions on Intelligent Vehicles 上。
标签
项目特点
**仅依赖IMU**:无需GPS、激光雷达或视觉传感器,仅靠一个IMU即可实现高精度航位推算。
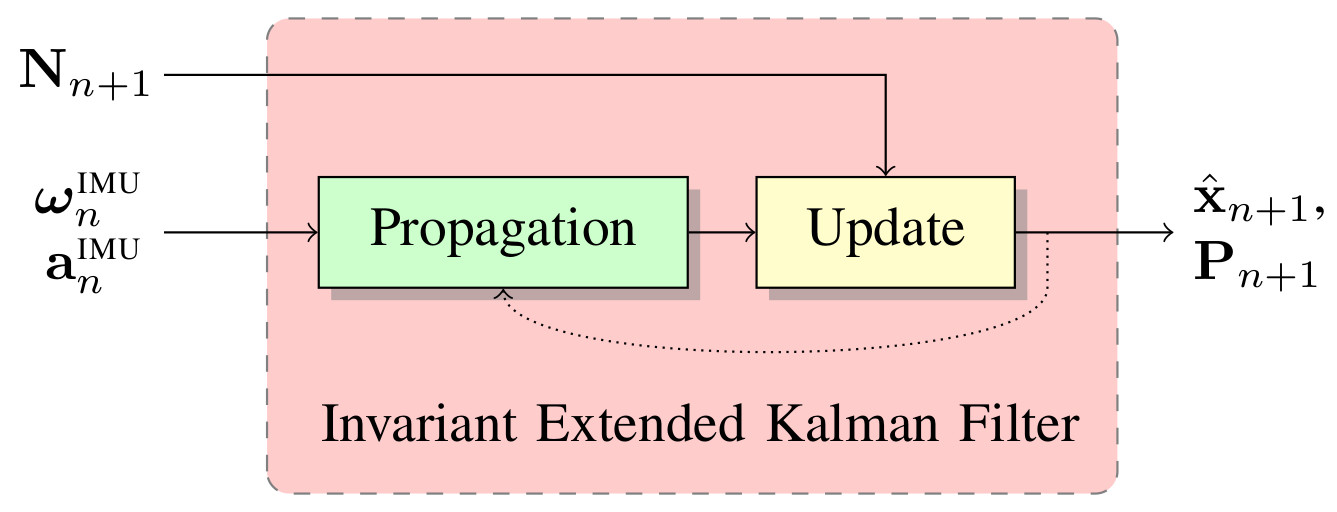
**深度学习自适应**:使用深度神经网络实时学习并输出最合适的噪声协方差矩阵,使卡尔曼滤波器能自适应不同运动状态。
**高精度**:在KITTI数据集上达到1.10%的平移误差,性能与使用更多传感器的顶级方法相当。
**自校准**:算法能自动估计并校准IMU的零偏,提高长期运行的稳定性。
**开源可复现**:提供完整的Python代码、训练好的模型参数以及预处理数据,方便研究者复现和二次开发。
技术规格
| 核心算法 | 扩展卡尔曼滤波 (EKF) + 深度神经网络 |
|---|---|
| 输入 | 6轴IMU数据(加速度计+陀螺仪) |
| 输出 | 3D位置、速度、姿态、IMU零偏 |
| 测试数据集 | KITTI Odometry (序列00-11) |
| 平均平移误差 | 1.10% |
| 编程语言 | Python 3.5+ |
| 深度学习框架 | PyTorch |
| 依赖库 | matplotlib, numpy, termcolor, scipy, navpy |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Python 3.5+ | 1 | — | 运行环境 |
| PyTorch | 1 | — | 深度学习框架 |
| matplotlib, numpy, scipy, navpy等 | 1 | — | Python依赖库 |
| KITTI IMU原始数据 | 1 | — | 用于训练和测试 |
| 预训练模型参数 | 1 | — | 可直接用于测试 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 5/5
⚪ 动手与操作: 1/5
🔵 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库
所需技能
🔧 **动手能力**:无需硬件动手能力,纯软件项目。
💻 **编程能力**:需要熟练掌握Python编程,理解PyTorch框架的使用,能够阅读和修改深度学习模型代码。
⚡ **电子电路**:无需硬件电路知识,但需要理解IMU传感器的工作原理和数据特性。
📐 **数学基础**:需要扎实的线性代数、概率论和状态估计理论(特别是卡尔曼滤波)基础。
适用场景
**学术研究**:作为惯性导航、多传感器融合、深度学习与经典滤波结合方向的研究基线。
**自动驾驶**:作为车辆在GPS信号丢失或视觉传感器失效时的备用定位方案。
**机器人导航**:为轮式机器人提供不依赖外部环境的自主定位能力。
**算法教学**:用于教学演示如何将深度学习与卡尔曼滤波结合,解决实际问题。