Kimera
Kimera
机器人
1/5
🧩 软硬件结合
已发布
项目简介
Kimera代码的索引仓库。
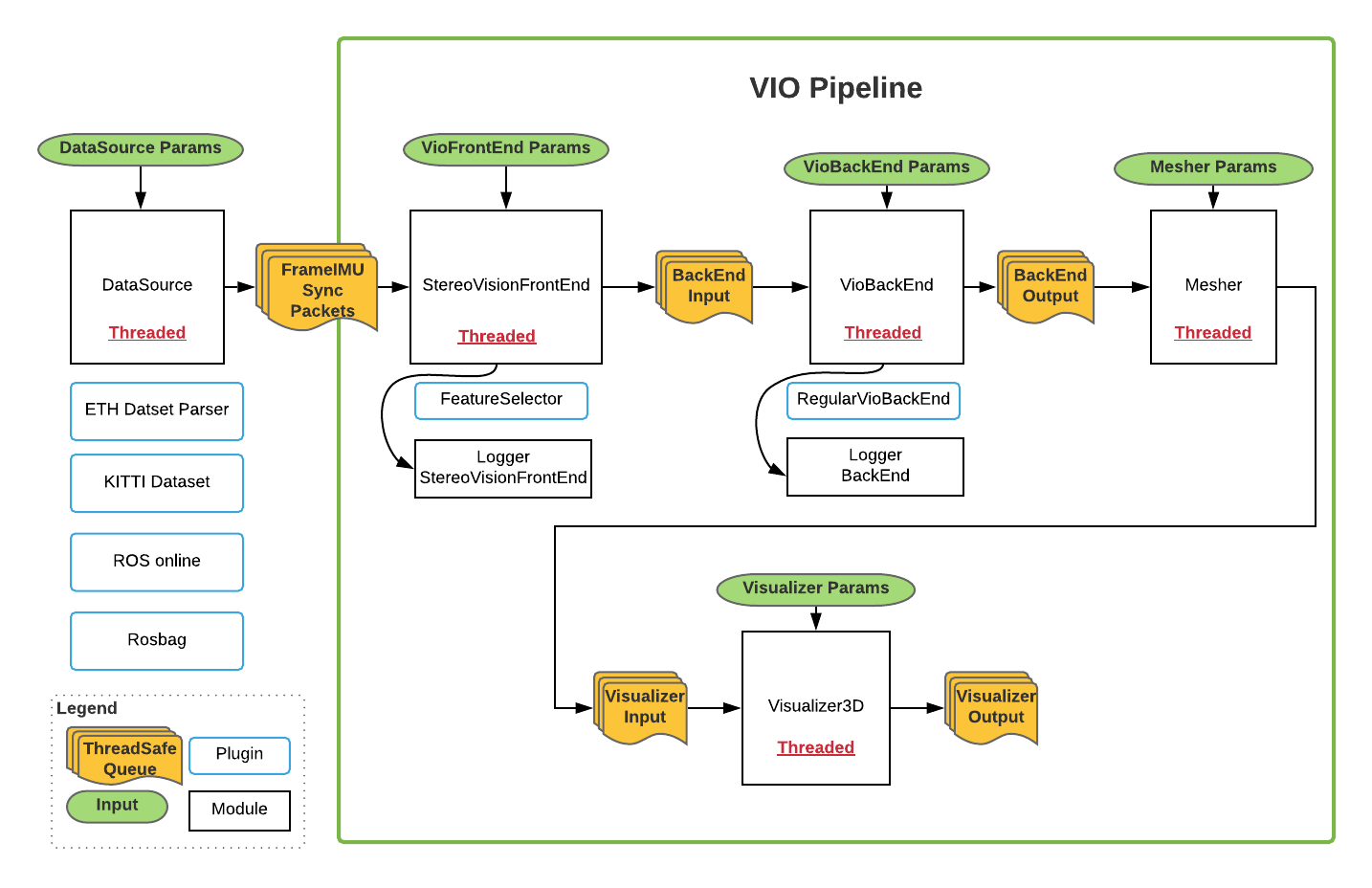
Kimera 是由 MIT SPARK 实验室开发的一个开源 C++ 库,专注于实时度量-语义同步定位与地图构建(Metric-Semantic SLAM)。它通过融合相机图像和惯性测量单元(IMU)数据,能够实时构建带有语义标注的三维环境网格地图。Kimera 的核心优势在于其模块化设计,整个系统由四个独立但协同工作的模块组成:首先是 Kimera-VIO,一个快速且精确的视觉惯性里程计管道,负责实时估计相机运动轨迹;其次是 Kimera-RPGO,基于鲁棒位姿图优化的完整 SLAM 实现,能够在大规模场景中消除累积漂移;然后是 Kimera-Mesher,负责生成单帧和多帧的三维网格;最后是 Kimera-Semantics,为三维网格添加语义标签,使机器人不仅能理解环境的几何结构,还能识别其中的物体和区域类别。
标签
项目特点
**实时度量语义 SLAM**:同时进行精确的定位和带语义标签的 3D 地图构建。
**模块化架构**:由四个核心模块组成,可独立使用或组合,便于集成和扩展。
**CPU 高效运行**:无需 GPU 即可实现实时性能,降低了硬件门槛。
**ROS 集成**:原生支持机器人操作系统,方便与现有机器人系统集成。
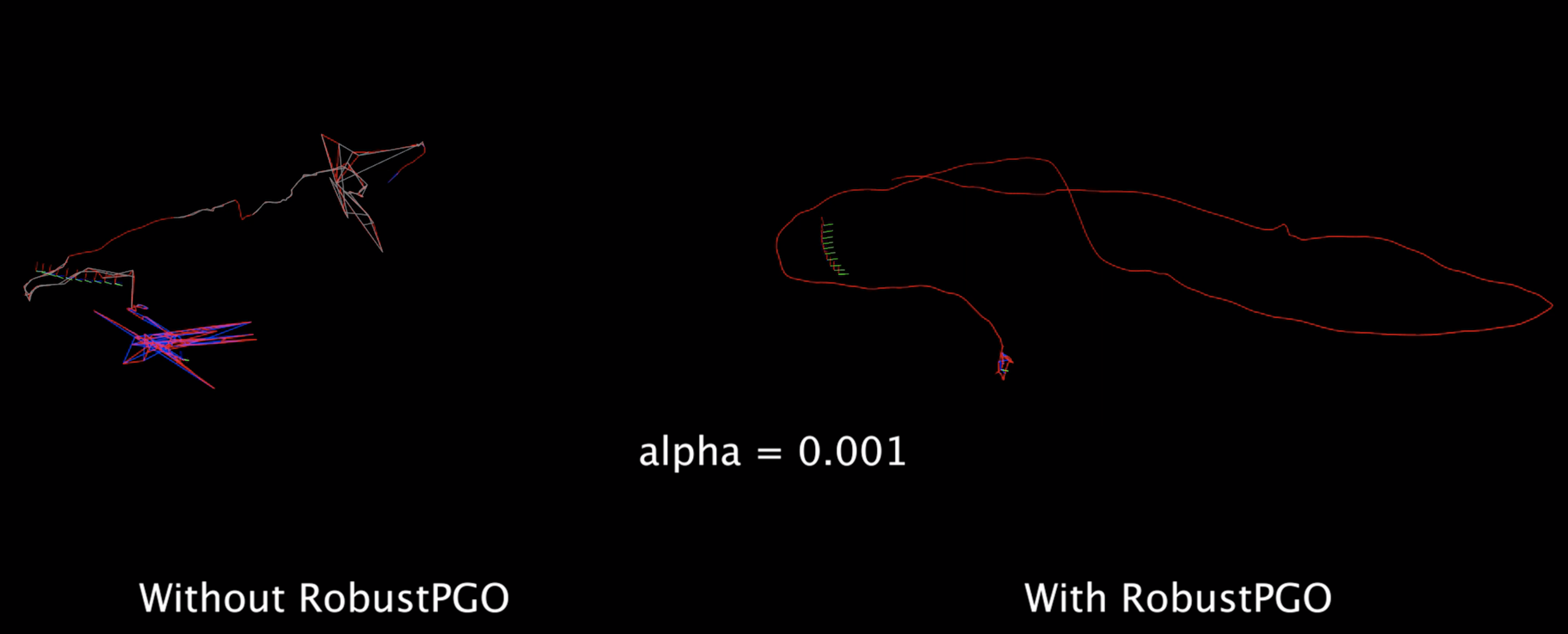
**鲁棒的后端优化**:采用鲁棒位姿图优化(RPGO)技术,有效处理 SLAM 中的错误回环检测。
**丰富的开源数据集**:提供了包含动态场景和多种环境的仿真数据集(uHumans, uHumans2),用于算法测试和评估。
技术规格
| 核心功能 | 实时度量语义 SLAM |
|---|---|
| 输入数据 | 相机图像(立体/单目)、IMU 数据 |
| 输出数据 | 机器人 6-DOF 位姿、3D 语义网格地图 |
| 主要语言 | C++ |
| 支持系统 | Linux (Ubuntu) |
| 依赖框架 | ROS (Robot Operating System) |
| 硬件要求 | CPU (无需 GPU) |
| 模块组成 | Kimera-VIO, Kimera-RPGO, Kimera-Mesher, Kimera-Semantics |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Ubuntu 操作系统 | 1 | — | 推荐 18.04 或 20.04 |
| ROS (Melodic/Noetic) | 1 | — | 机器人操作系统 |
| C++ 编译器 | 1 | — | 支持 C++14 或更高版本 |
| CMake | 1 | — | 构建工具 |
| 立体/单目相机 | 1 | — | 如 Intel RealSense, ZED 等 |
| IMU (惯性测量单元) | 1 | — | 通常集成在相机或飞控中 |
| 计算机 (CPU) | 1 | — | 推荐 i7 或同等性能 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 5/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 5/5
🔵 动手与操作: 3/5
🔵 狂热与坚持: 4/5
🔵 创造与创新: 4/5
项目图库






所需技能
🔧 **动手能力**:需要搭建和配置机器人硬件平台(相机、IMU、计算单元),并连接传感器到计算机。
💻 **编程能力**:需要精通 C++ 编程,熟悉 CMake 构建系统,并具备 ROS 开发经验。理解 SLAM 算法原理(如图优化、特征匹配)是加分项。
⚡ **电子电路**:需要了解传感器(相机、IMU)的接口和驱动配置,可能涉及 I2C、USB 等通信协议。
适用场景
**机器人自主导航**:为移动机器人提供实时、精确的定位和语义地图,用于避障和路径规划。
**增强现实 (AR)**:在未知环境中,为 AR 设备提供稳定的位姿估计和 3D 场景理解。
**自动驾驶**:作为车辆感知系统的一部分,提供高精度的环境地图和语义信息。
**学术研究**:用于研究 SLAM、3D 重建、语义理解等前沿课题,并作为基准算法进行对比。
**工业巡检**:让无人机或地面机器人在复杂工业环境中进行自主巡检和建模。