Dracarys_5J 五自由度机械臂
Dracarys_5J
机械臂
4/5
🧩 软硬件结合
已发布
项目简介
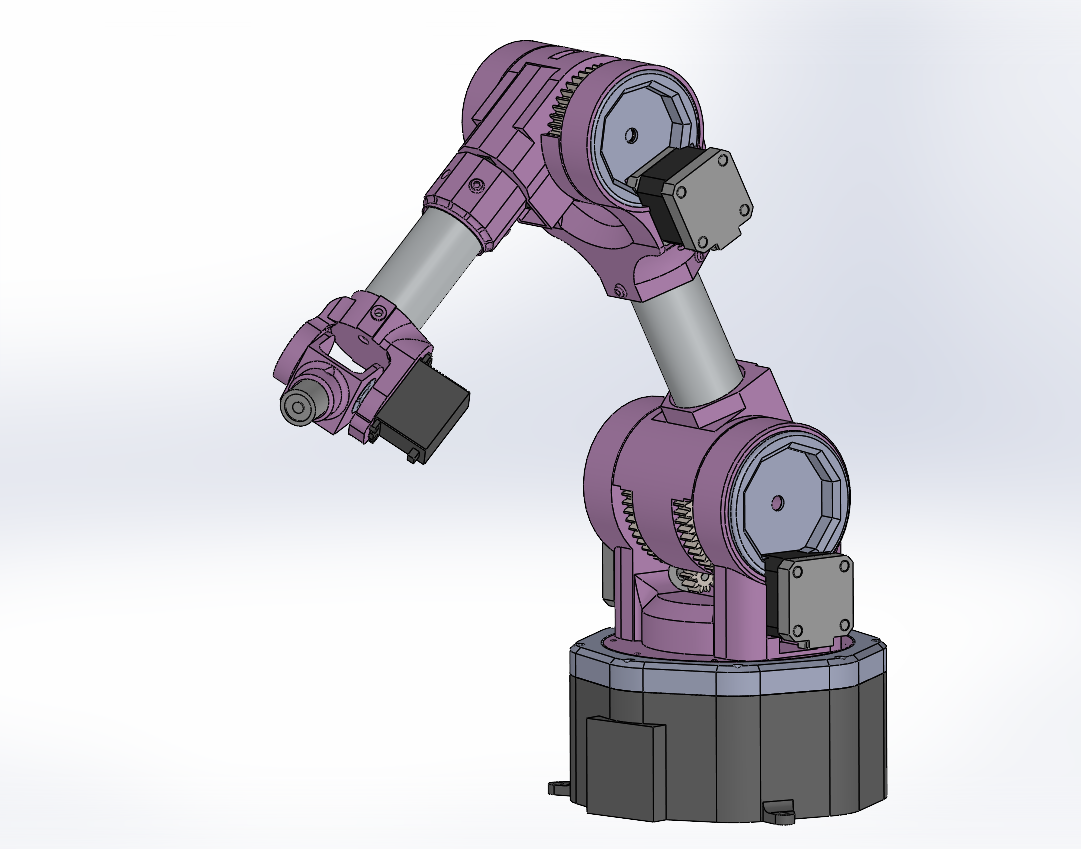
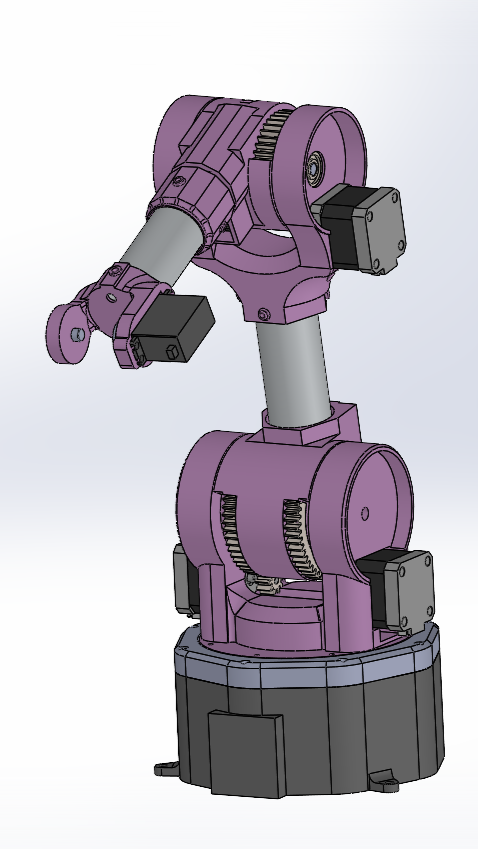
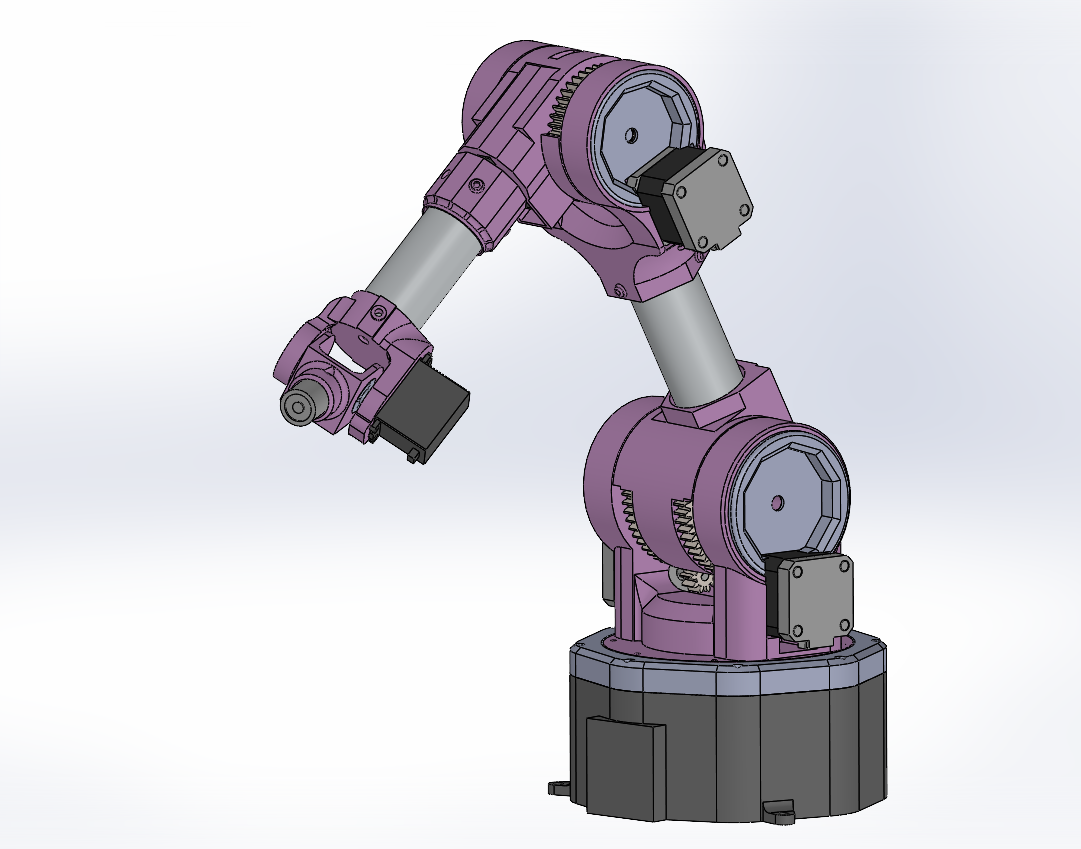
开发5自由度3D打印开源模块化机械臂,步进电机驱动,梯形
开发一款5自由度3D打印机械臂,采用开源模块化设计。配备步进电机驱动、梯形运动曲线及专用控制系统,包含可复现的文档和验证测试。
标签
项目特点
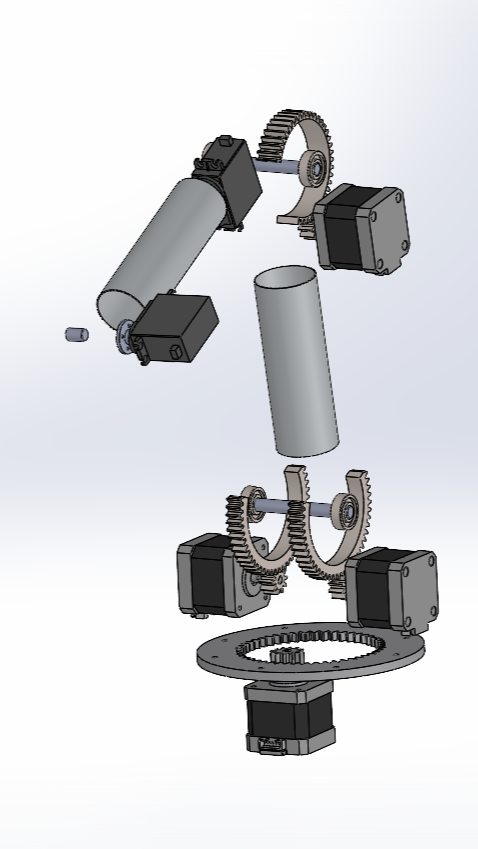
**5自由度拟人设计**:模仿人类手臂的运动结构,灵活度高。
**完全3D打印**:所有结构件均可使用FDM打印机自制,成本低、易复现。
**开源模块化**:硬件、软件、机械设计全部开源,方便修改和扩展。
**步进电机驱动**:采用步进电机实现精确的位置和速度控制。
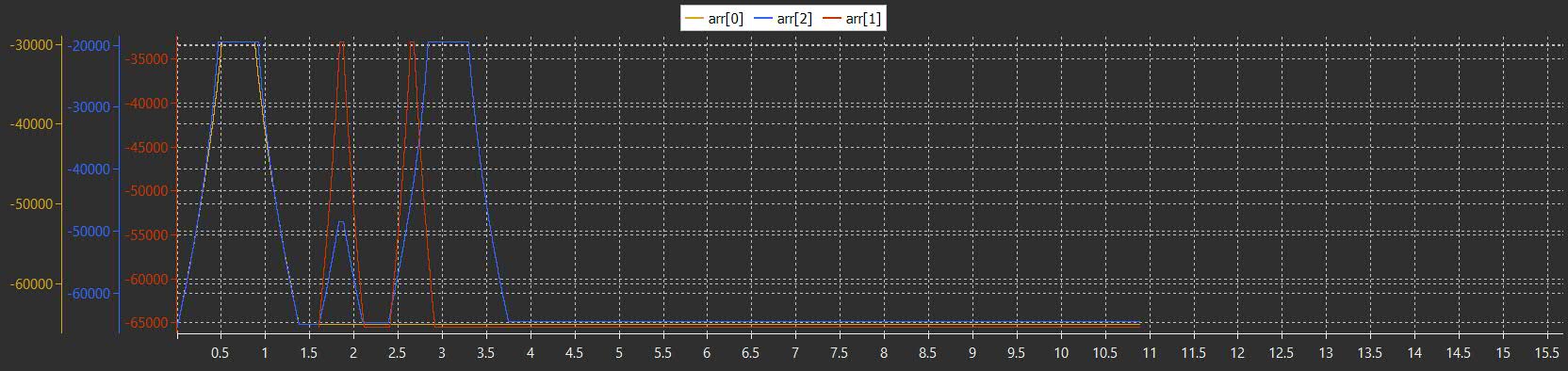
**梯形运动控制**:内置梯形速度曲线算法,保证运动平滑、减少冲击。 https://raw.githubusercontent.com/Phersax/Dracarys_5J/main/Dr5_report.pdf)E开发,代码结构清晰,支持中断https://raw.githubusercontent.com/Phersax/Dracarys_5J/main/Dr5_pinout&configuration.pdf)stem Toolbox进行运动学计算和轨迹规划https://raw.githubusercontent.com/Phersax/Dracarys_5J/main/media/) 说明 | |------|------| | 自由度 | 5 (关节1-3 + 腕部 + 夹爪) | | 驱动方式 | 步进电机 (NEMA 17 或类似) | | 控制板 | STM32系列 (基于STM32CubeMX配置) | | 结构材料 | PLA/PETG 等3D打印耗材 | | 运动控制 | 梯形速度曲线 (Trapezoidal profile) | | 开发环境 | STM32CubeIDE, MATLAB (Robotics System Toolbox) | | 通信接口 | 待采集 (从原理图推断: 可能包含UART/I2C/GPIO) | | 电源 | 待采集 (根据电机数量推断: 12V/24V DC) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印外壳及关节件 | 1套 | — | 使用PLA/PETG打印 |
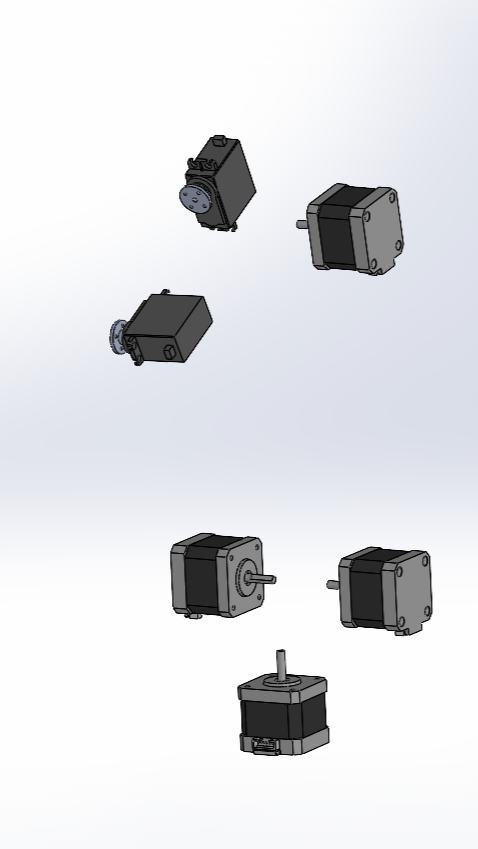
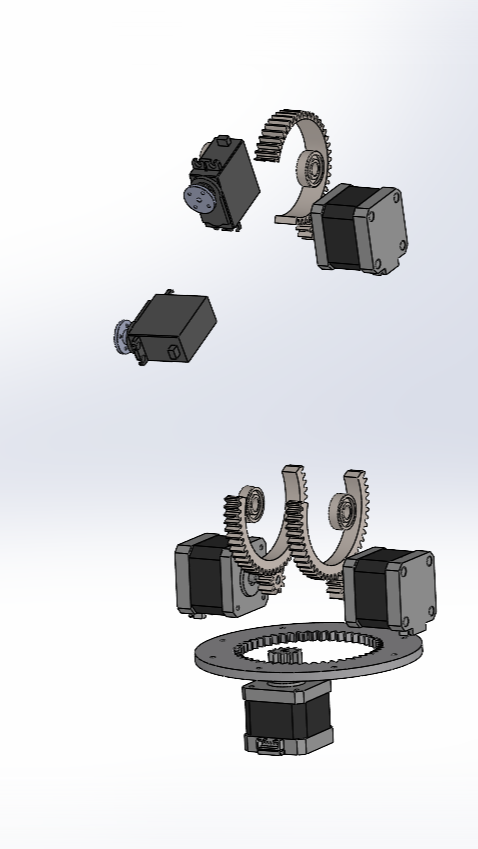
| 步进电机 (NEMA 17) | 6-7个 | — | 关节1-3各1个,关节2需2个镜像,夹爪1个 |
| 步进电机驱动器 (如A4988/DRV8825) | 6-7个 | — | 与电机数量对应 |
| STM32开发板 (如STM32F4系列) | 1个 | — | 主控制器 |
| 电源模块 (12V/24V) | 1个 | — | 为电机和控制板供电 |
| 杜邦线/排针/排线 | 若干 | — | 连接电路 |
| 螺丝、螺母、轴承 | 若干 | — | 组装关节 |
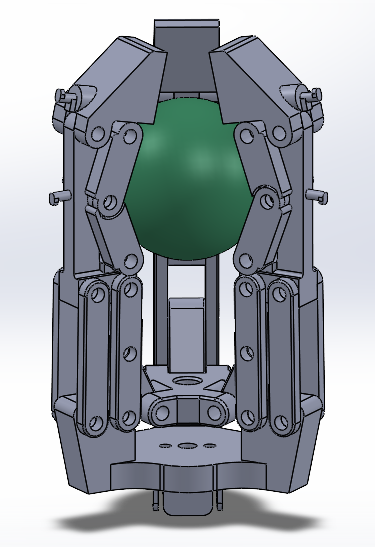
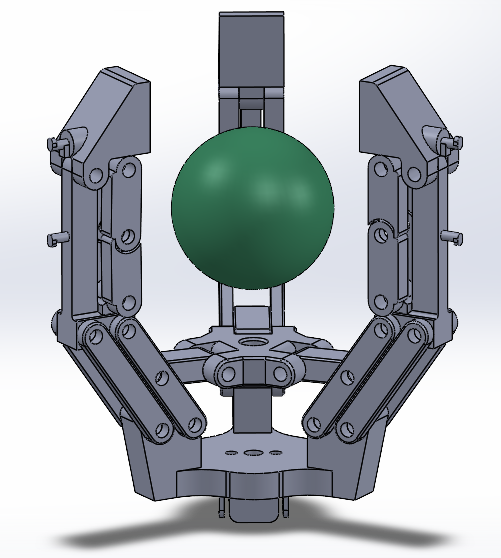
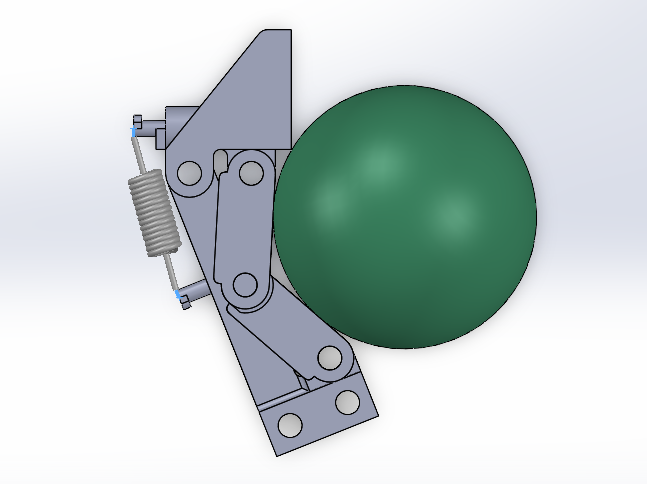
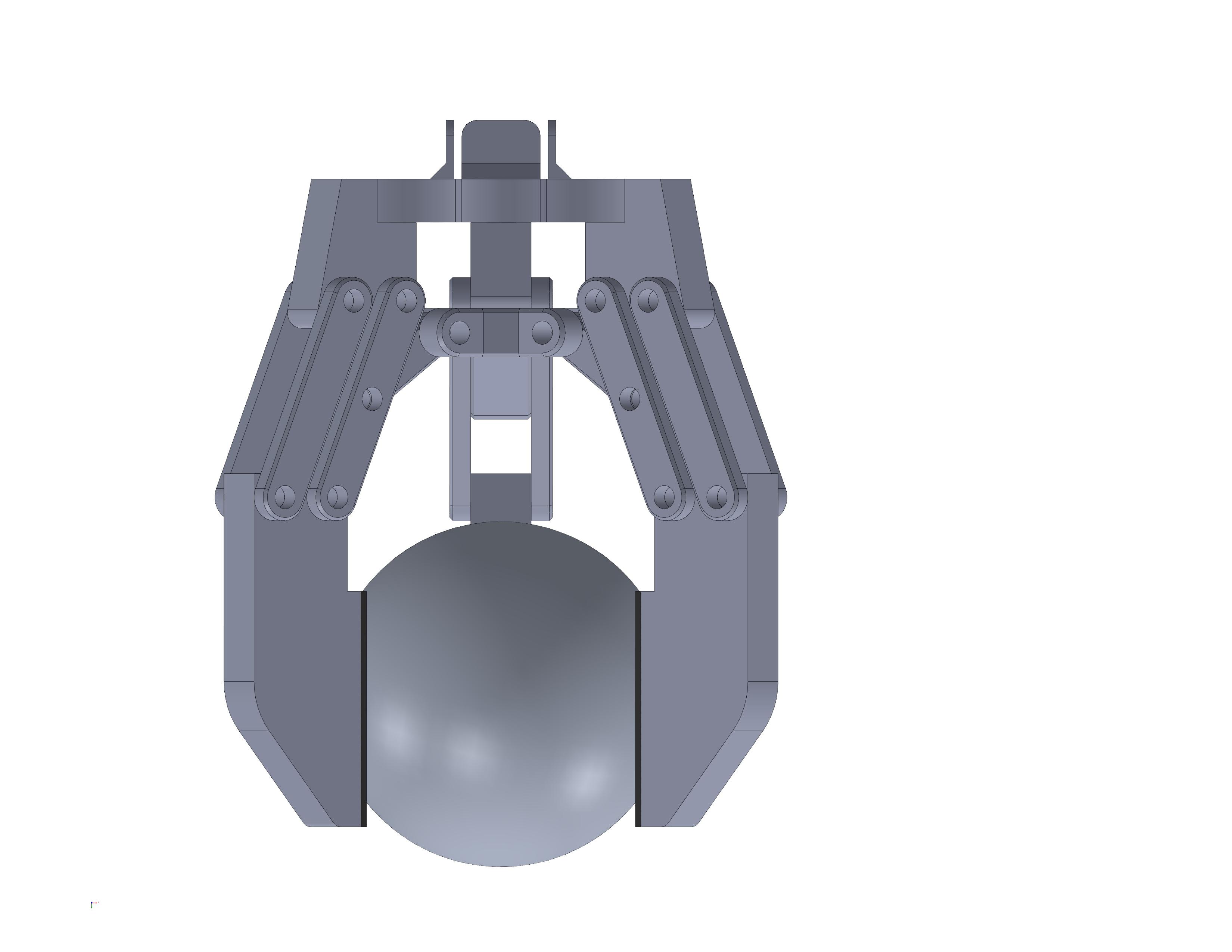
| 夹爪末端执行器 | 1套 | — | 可打印或购买 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
🔵 狂热与坚持: 4/5
🔵 创造与创新: 4/5
项目图库






所需技能
🔧 **动手能力**:需要熟练使用3D打印机进行零件打印和后处理,具备机械组装和调试能力,能够焊接电子元件并搭建电路。
💻 **编程能力**:需要掌握C语言,熟悉STM32CubeIDE开发环境,理解定时器、中断、PWM等嵌入式外设编程。了解MATLAB基本操作和Robotics System Toolbox的使用。
⚡ **电子电路**:需要理解步进电机驱动原理(A4988/DRV8825),能够阅读原理图,掌握基本的电路连接和故障排查技能。
适用场景
**机器人教育**:作为高校或职业院校的机器人课程实践项目,学生可以完整经历从设计、制造到编程的全过程。
**创客/极客DIY**:适合对机械臂感兴趣的创客,在开源基础上进行二次开发,如增加视觉、力反馈等功能。
**轻量级自动化**:可用于桌面级分拣、抓取、搬运等简单工业或实验室自动化任务。
**研究验证平台**:作为运动控制算法(如梯形速度、S形曲线、轨迹规划)的验证和测试平台。