自动驾驶控制算法入门指南
AutonomousVehicleControlBeginnersGuide
3/5
🧩 软硬件结合
已发布
项目简介
Python sample codes and documents about Autonomous vehicle control algorithm. This project can be used as a technical gu
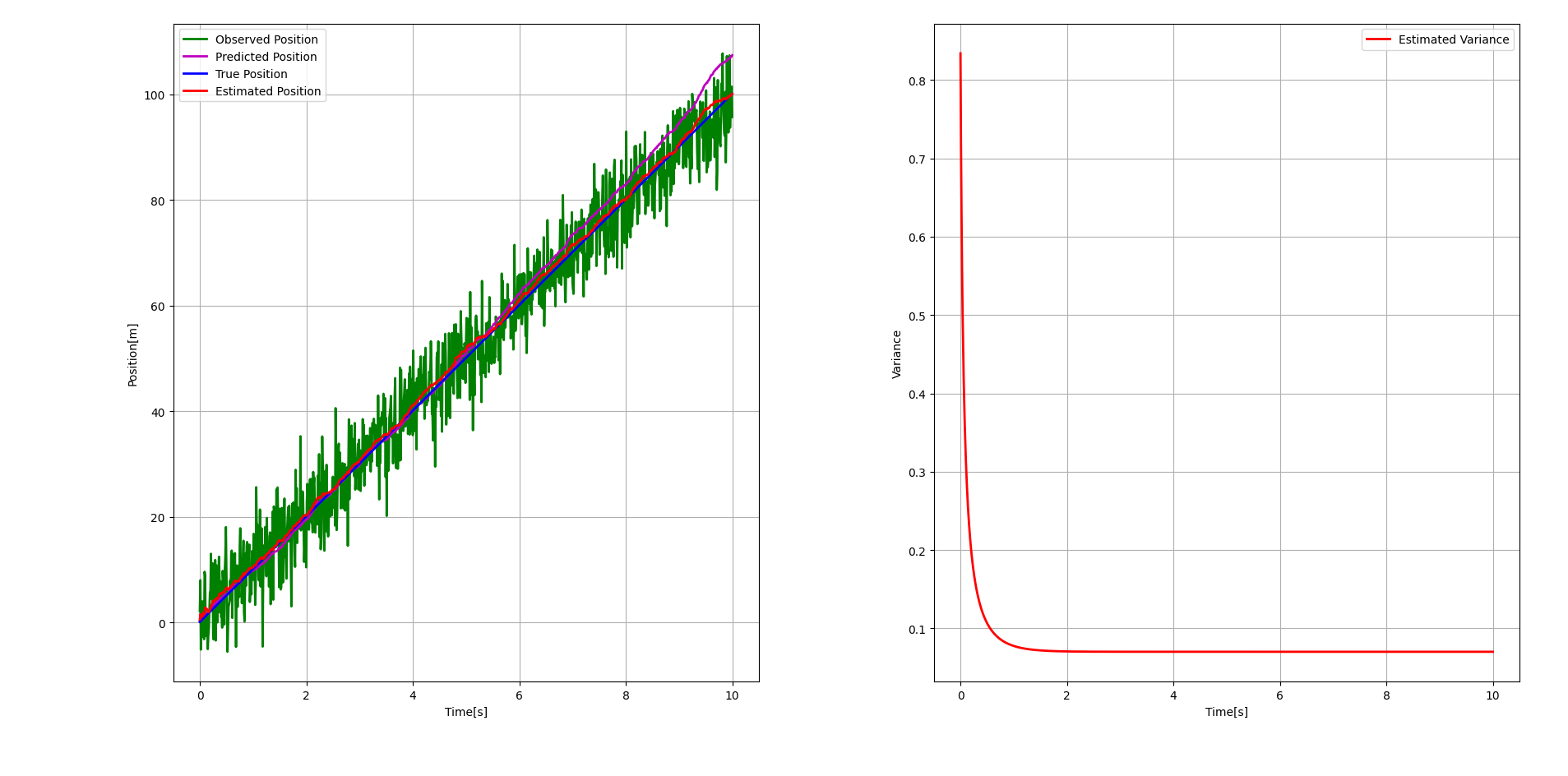
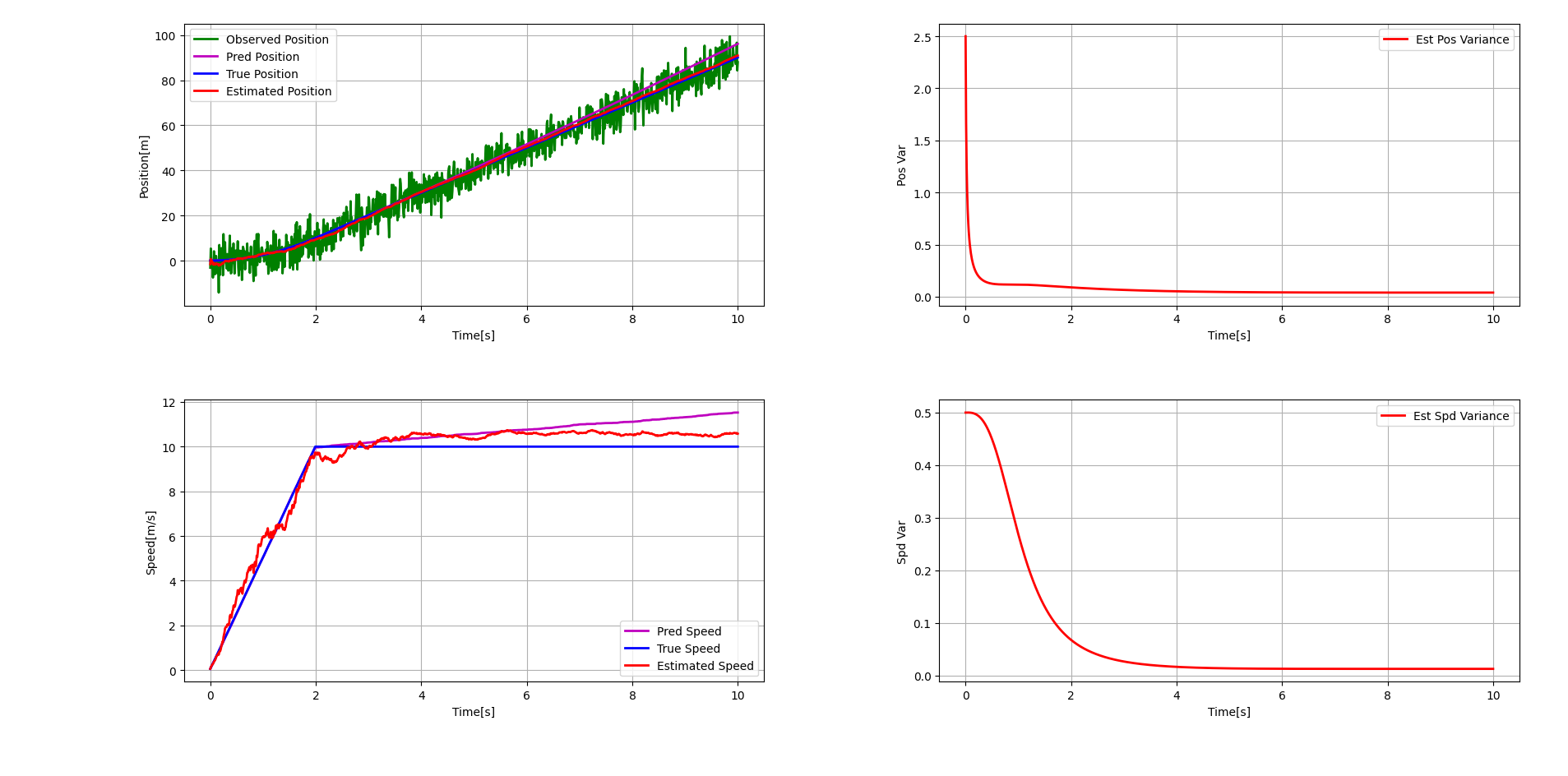
这是一个面向自动驾驶算法初学者的开源学习项目,核心目标是通过大量可运行的Python示例代码,帮助开发者系统性地掌握车辆控制与感知算法。项目覆盖了自动驾驶技术栈中的五个关键模块:定位、建图、路径规划、路径跟踪和感知。在定位方面,提供了扩展卡尔曼滤波、无迹卡尔曼滤波和粒子滤波的实现;建图部分包含二值占据网格、代价地图、势场地图和NDT地图的构建方法;路径规划则集成了A*、Dijkstra、RRT系列以及PSO、PRM等十余种经典与前沿算法;路径跟踪模块实现了纯追踪、Stanley控制、LQR和MPPI等多种控制策略;感知部分还包含了矩形拟合检测和传感器外参估计等实用功能。所有代码均使用Python编写,依赖Matplotlib、NumPy和SciPy等主流科学计算库,并提供了基于Docker和VS Code Dev Containers的一键环境配置方案,大幅降低了入门门槛。项目通过持续集成(CI)确保在Linux、Windows和macOS上均可稳定运行,并配有详细的文档说明。它特别适合自动驾驶领域的初学者、在校学生以及希望快速验证算法效果的工程师,无论是用于自学、课堂教学还是工作参考,都能从中获得直观的算法理解和可复用的代码基础。
标签
项目特点
提供完整的Python示例代码,可直接运行和修改
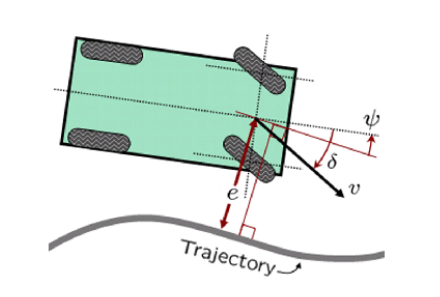
涵盖多种经典控制算法:Pure Pursuit、Stanley、MPC等
包含车辆运动学与动力学模型仿真
配套详细的文档说明,降低学习门槛
代码结构清晰,模块化设计便于扩展
支持可视化仿真,实时观察控制效果
技术规格
| 编程语言 | Python 3.x |
|---|---|
| 核心依赖 | NumPy, Matplotlib, SciPy |
| 仿真环境 | 2D 仿真(基于Matplotlib可视化) |
| 车辆模型 | 自行车模型(Kinematic Bicycle Model) |
| 控制算法 | Pure Pursuit, Stanley, MPC, LQR |
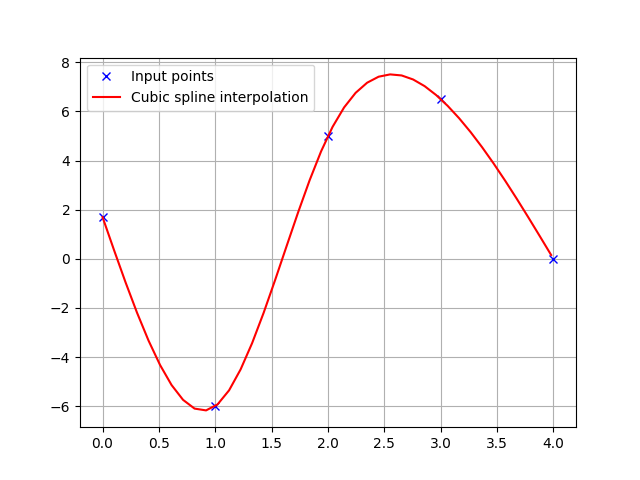
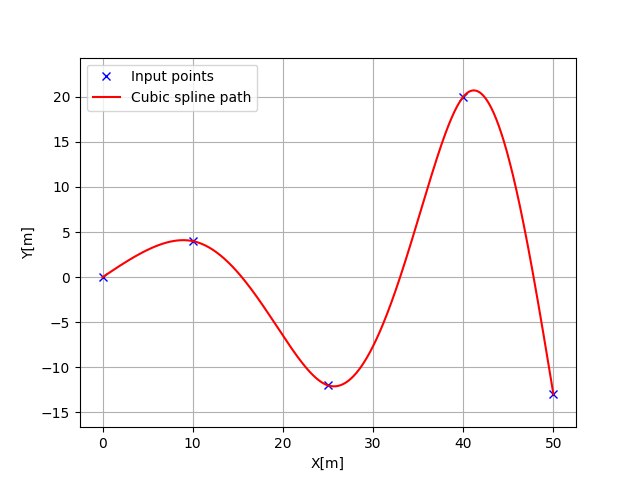
| 路径类型 | 直线、圆形、正弦曲线、自定义路径 |
| 运行平台 | Windows / macOS / Linux |
| 文档格式 | Markdown + Jupyter Notebook |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Pure Pursuit 示例 | 1 | — | 纯追踪控制算法 |
| Stanley 控制器示例 | 1 | — | 斯坦利控制算法 |
| MPC 示例 | 1 | — | 模型预测控制算法 |
| LQR 示例 | 1 | — | 线性二次型调节器 |
| 车辆运动学模型 | 1 | — | 自行车模型仿真 |
| 算法说明文档 | 1 | — | Markdown格式 |
| Jupyter Notebook教程 | 1 | — | 交互式学习 |
能力画像
**记忆与知识检索**:3/5 — 需要查阅控制算法公式和车辆运动学模型
**动手与操作**:3/5 — 运行代码、调整参数、观察仿真结果
**编程与算法**:4/5 — 核心是Python算法实现,涉及矩阵运算和控制逻辑
**设计与建模**:3/5 — 需要理解车辆运动学模型和路径规划
**实验与调试**:4/5 — 通过调整控制参数观察车辆行为变化
**协作与分享**:2/5 — 单人学习项目,但可Fork后分享改进
**学习与研究**:5/5 — 非常适合系统学习自动驾驶控制算法
**系统集成**:3/5 — 将不同控制算法与车辆模型集成仿真
项目图库











所需技能
Python编程基础
线性代数与矩阵运算
基础控制理论(PID、状态空间)
车辆运动学模型理解
使用Git进行版本管理
阅读英文技术文档
适用场景
自动驾驶控制算法入门学习
高校车辆工程或机器人课程实验
个人项目:搭建车辆控制仿真平台
算法对比研究:不同控制器的性能评估
面试准备:自动驾驶控制岗位的实践练习
教学演示:在课堂上展示控制算法效果