EvoArm 开源机械臂
EvoArm
机械臂、智能家居
3/5
🧩 软硬件结合
已发布

项目简介
开源3D打印机械臂项目。
一款开源的可3D打印机械臂。
标签
项目特点
**开源与可打印**:所有结构件均可通过3D打印机自行制作,降低了入门门槛和成本。
**高自由度**:3个主自由度(摆动、主臂、前臂/执行器)加上2个腕部自由度(触控板),共5个自由度。
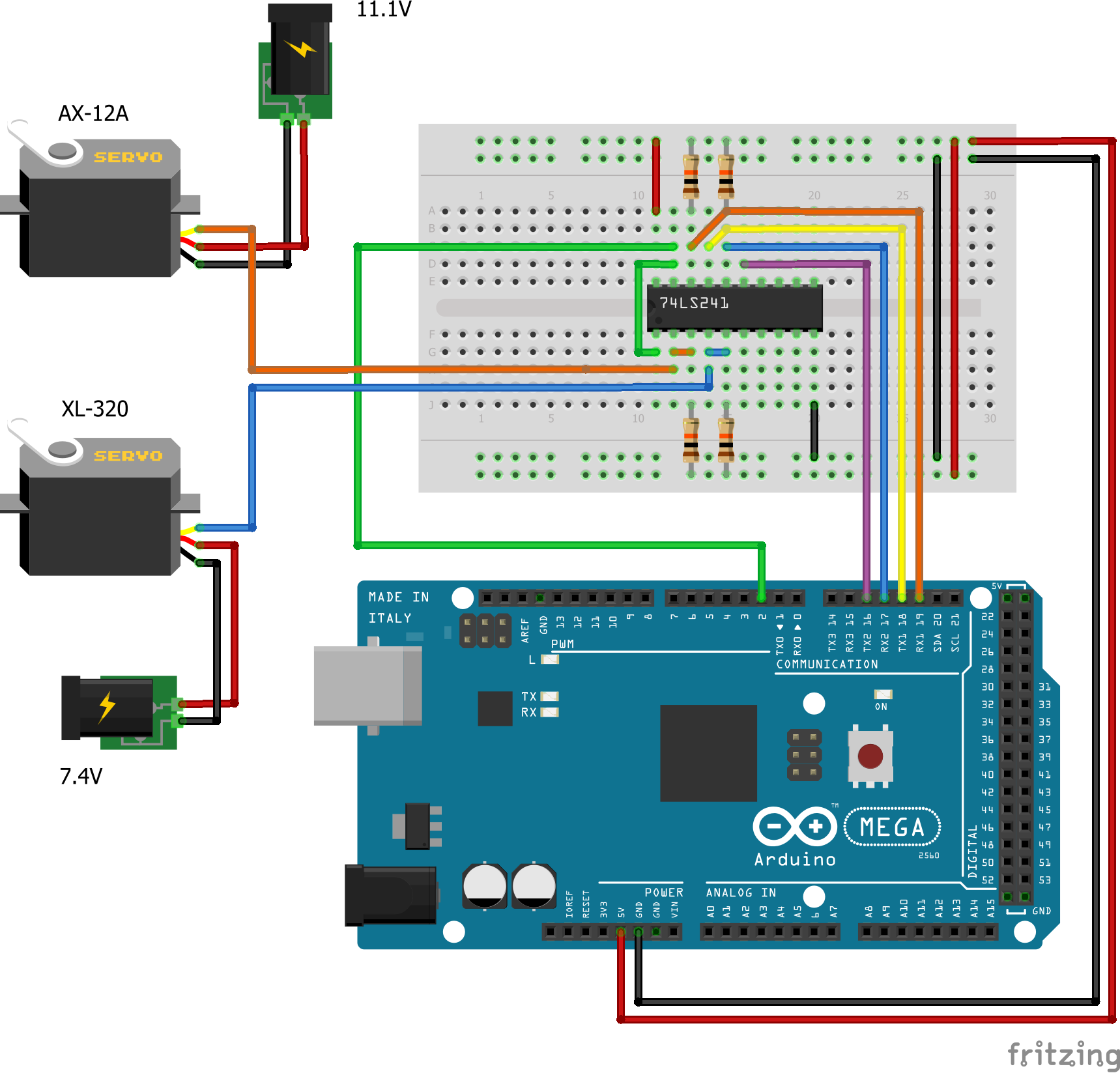
**智能舵机驱动**:使用 Dynamixel AX-12/18A 和 XL-320 系列智能舵机,具备位置反馈、温度保护等功能。
**逆运动学支持**:提供专门的 Python 图形化 IK 应用,可计算目标位置对应的舵机角度,并具备线性插值和边界检查功能。
**灵活的硬件接口**:支持 Arduino Mega2560 作为主控制器,通过硬件 UART 分别控制不同协议的舵机,并设计了复用电路。
**可扩展性**:支持通过 UDP 接收外部程序(如 ROS、MATLAB)的流式指令,便于集成到更复杂的系统中。
技术规格
| 自由度 | 3+2 DOF(3个主关节 + 2个腕部关节) |
|---|---|
| 驱动方式 | Dynamixel AX-12/18A(主臂)+ XL-320(腕部) |
| 控制器 | Arduino Mega2560(推荐)或 Arduino Uno/Nano |
| 通信协议 | Dynamixel 半双工异步串行通信(1M baud) |
| 逆运动学 | Python + PyGame 图形化应用,支持 UDP 指令 |
| 尺寸 | 桌面级(具体尺寸见3D模型文件) |
| 电源 | 通过 Dynamixel 舵机供电(推荐使用专用电源) |
| 许可证 | CC-BY-SA 3.0 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Dynamixel AX-12A 或 AX-18A | 3 | — | 主臂驱动,推荐AX-18A |
| Dynamixel XL-320 | 2 | — | 腕部驱动 |
| Arduino Mega2560 | 1 | — | 推荐,提供多UART |
| Arduino Uno/Nano | 1 | — | 可选,需软件串口 |
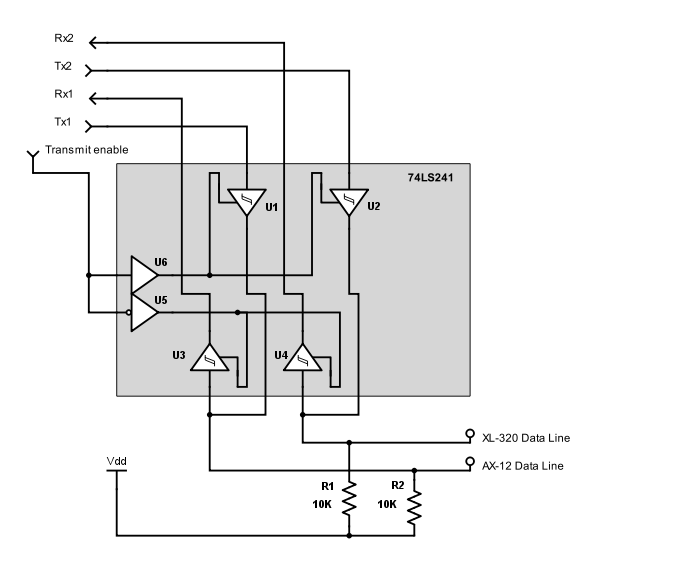
| 74LS241 三态缓冲器 | 1 | — | 用于串行数据线复用 |
| 4.7kΩ 上拉电阻 | 若干 | — | 防止数据线浮空 |
| 结构件(STL文件) | 1套 | — | 见项目模型部分 |
| 螺丝、螺母、垫片等 | 1套 | — | 标准M3/M4规格 |
| 12V 5A 电源适配器 | 1 | — | 为Dynamixel舵机供电 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
🔵 创造与创新: 4/5
项目图库

所需技能
🔧 **动手能力**:需要熟练使用3D打印机进行零件制作,具备基本的机械组装能力(螺丝、轴承等),以及焊接和面包板搭建电路的经验。
💻 **编程能力**:需要掌握 Python 编程基础,能够运行和调试 IK 应用;了解 Arduino 编程,能够上传和修改控制代码。
⚡ **电子电路**:需要理解串行通信原理(UART、半双工),能够看懂电路图并搭建复用电路(74LS241),具备调试串行信号的能力。
适用场景
**机器人教育**:作为学习机械臂结构、运动学和控制的实践平台。
**桌面自动化**:用于实验室或小型工作台的简单抓取、搬运任务。
**创客项目**:作为开源机器人项目的核心,可集成视觉、力觉等传感器。
**算法验证**:用于验证和测试逆运动学、轨迹规划、控制算法。