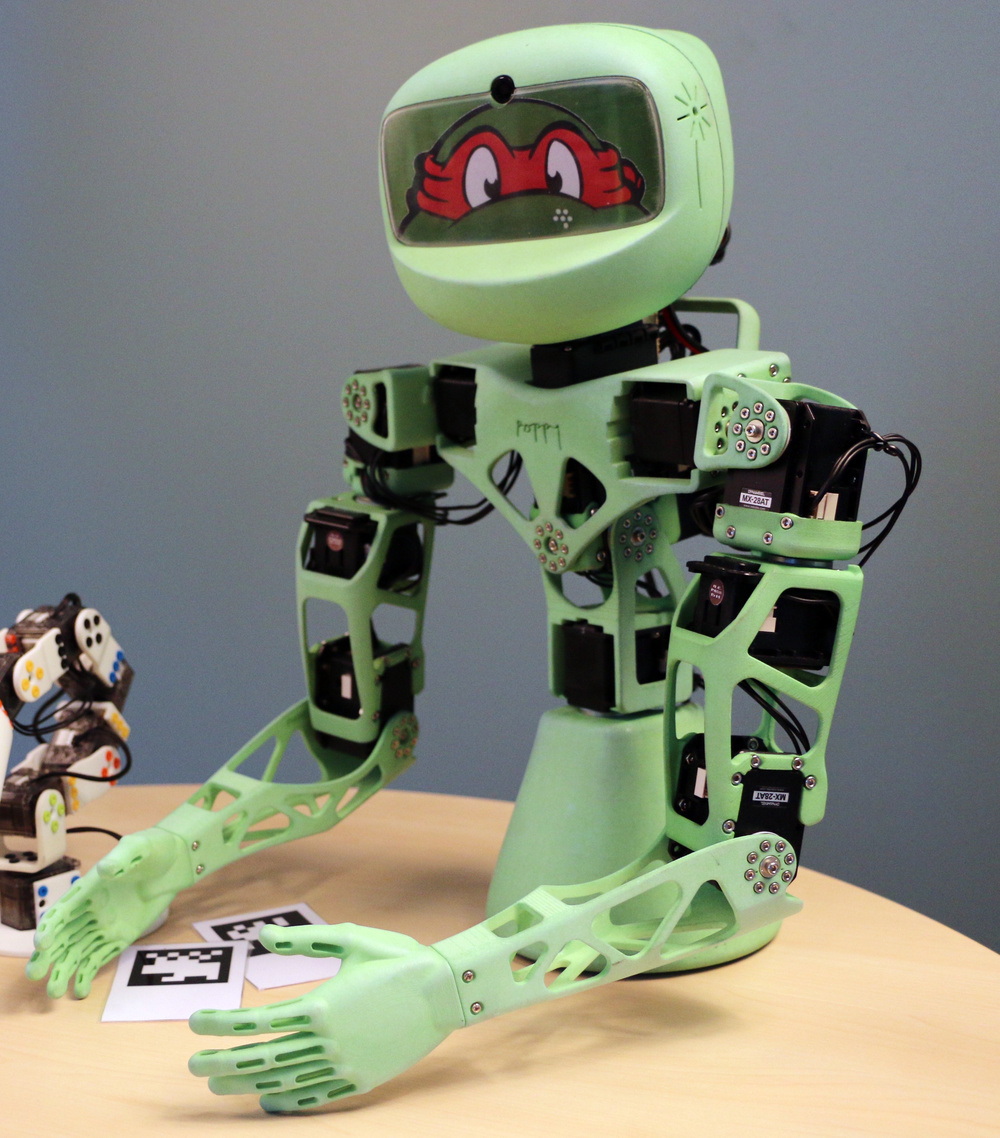
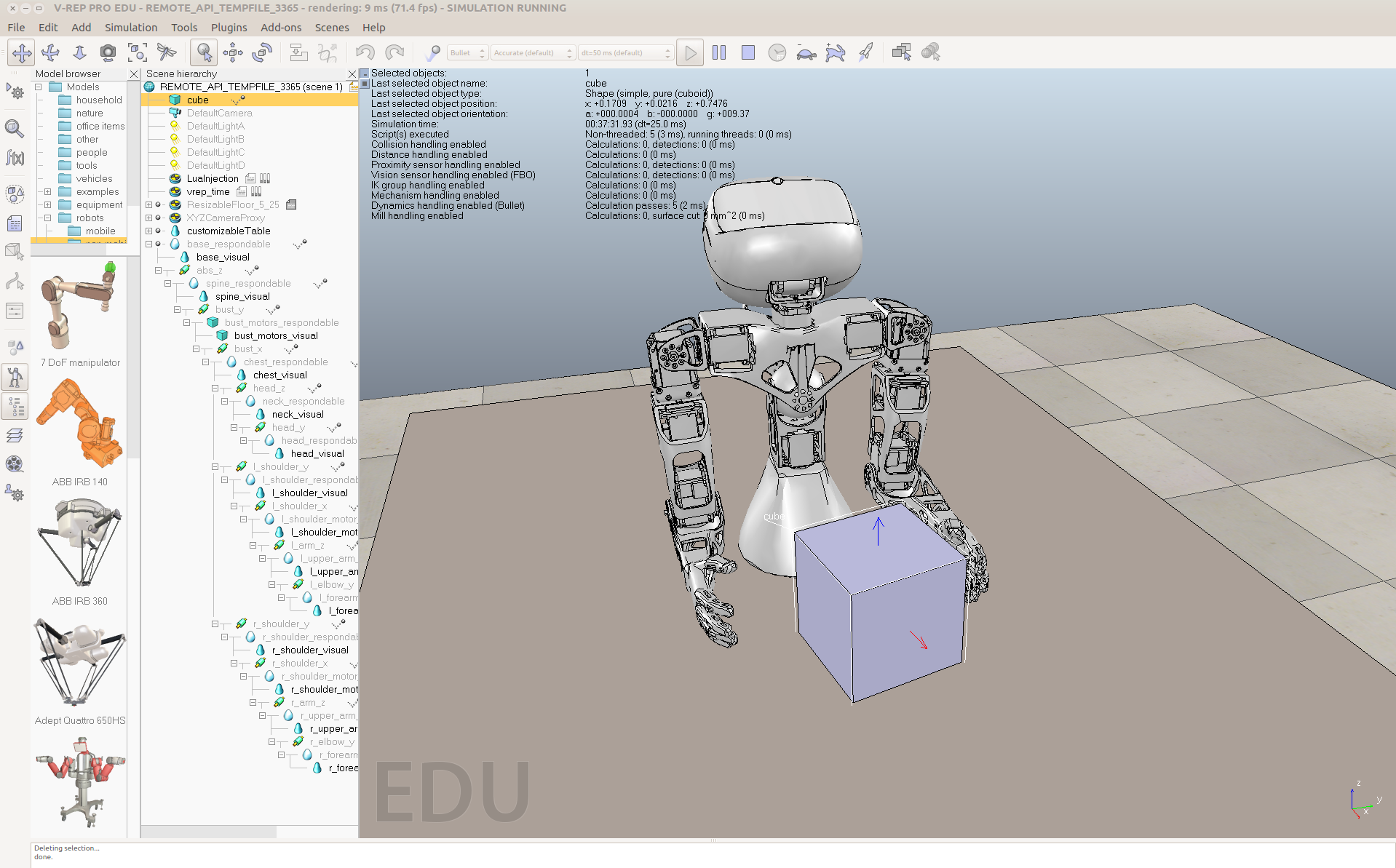
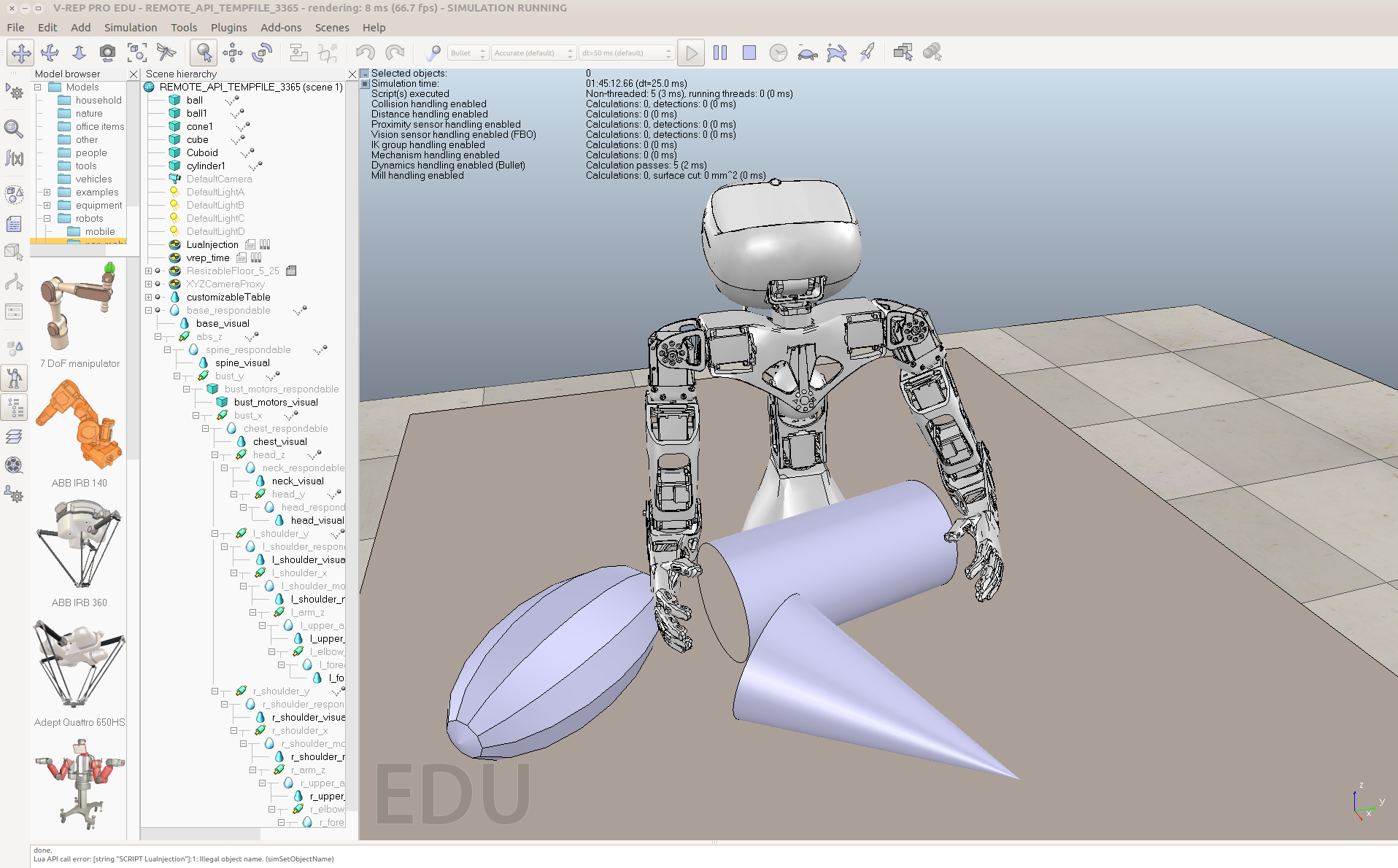
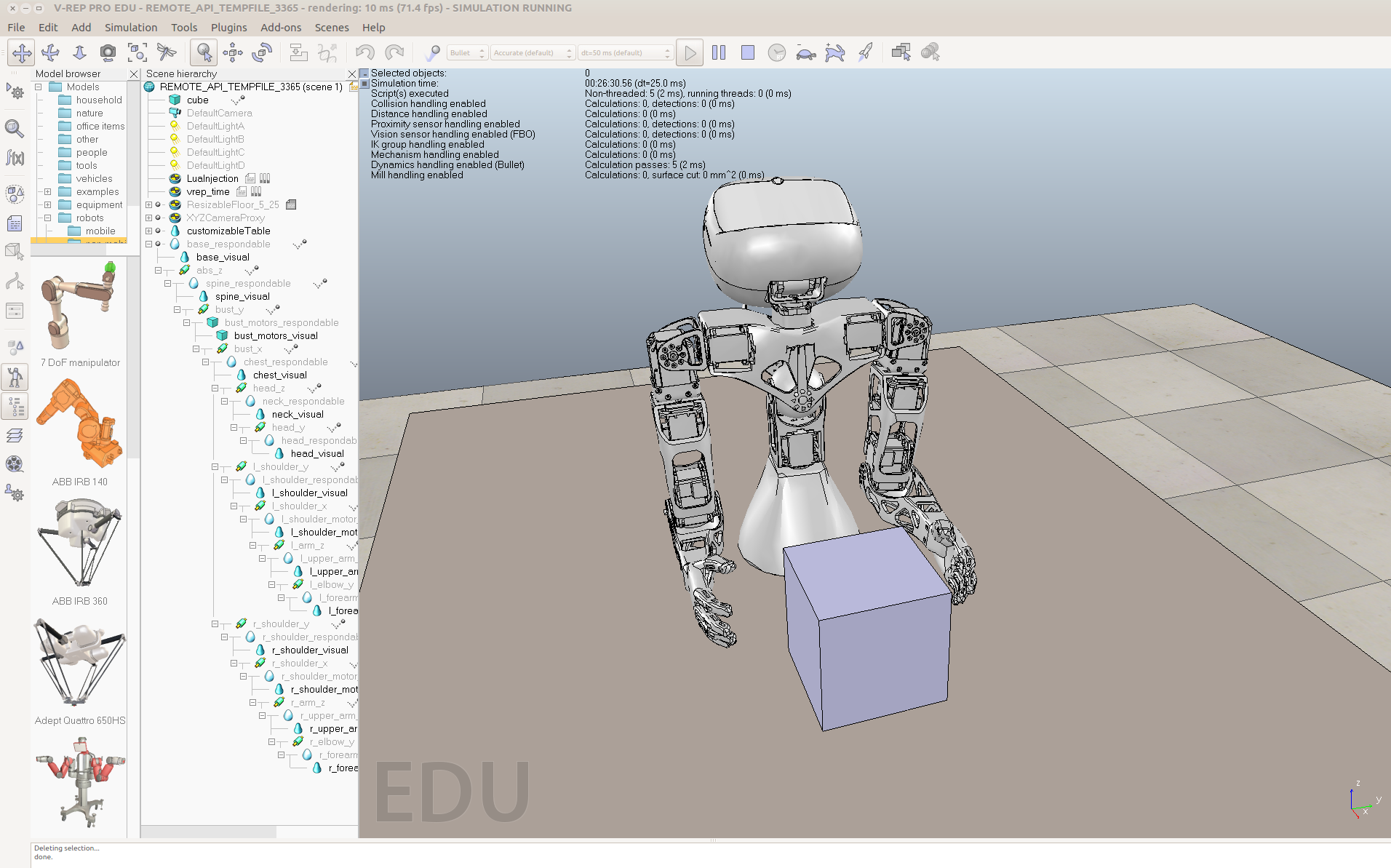
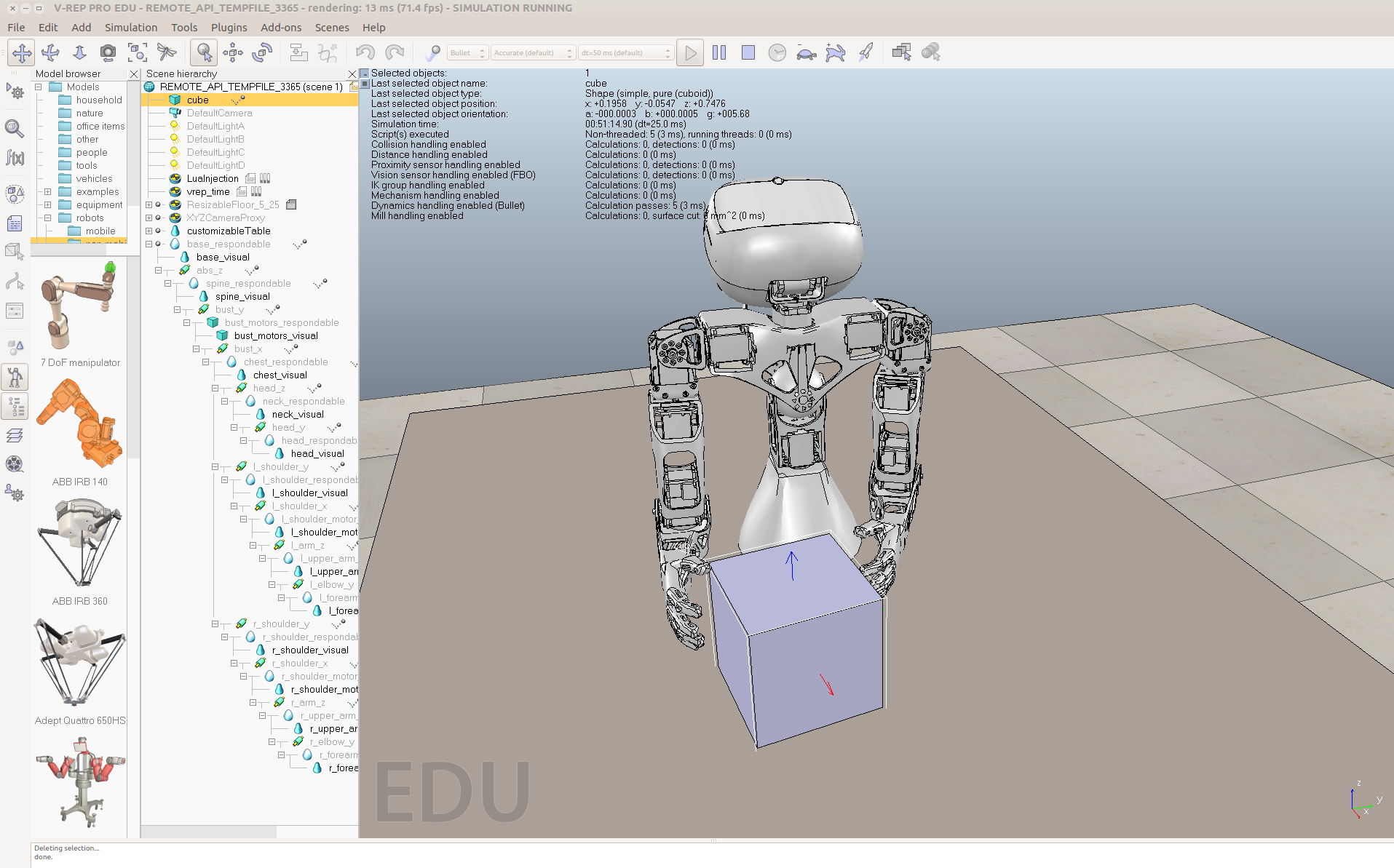
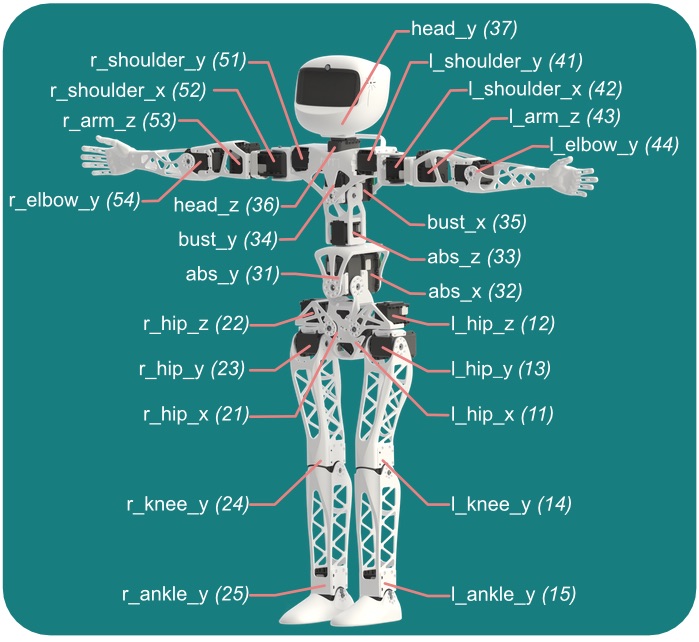
Poppy Torso is an open-source and 3D printed torso robot. Optimized for research and education purposes, its modularity
poppy-torso
人形机器人
3/5
人形机器人
已发布

项目简介
Poppy Torso is an open-source and 3D printed torso robot. Optimized for research and education purposes, its modularity
标签
项目特点
**完全开源**:硬件设计文件、固件、控制软件全部开放,可自由修改和再分发。
**模块化3D打印结构**:所有结构件均可通过3D打印制造,便于快速迭代和低成本复制。
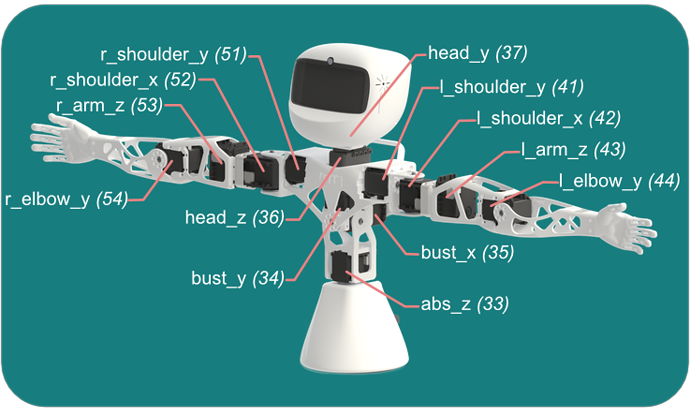
**12自由度设计**:躯干和头部具备多关节运动能力,支持丰富的姿态和动作表达。
**基于XL-320舵机**:采用高性能、带反馈的智能舵机,支持位置、速度、温度等实时监控。
**Raspberry Pi主控**:使用树莓派作为核心控制器,兼容Python生态,易于编程和扩展。
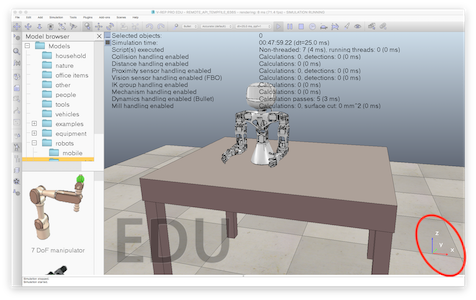
**面向研究与教育**:提供完整的文档、示例代码和仿真环境,降低入门门槛。
技术规格
| 自由度 | 12 |
|---|---|
| 舵机型号 | Dynamixel XL-320 |
| 主控制器 | Raspberry Pi 3B+(或兼容型号) |
| 通信接口 | USB转TTL(通过USB2Dynamixel适配器) |
| 电源输入 | 7.4V~12V DC(推荐11.1V锂聚合物电池) |
| 结构材料 | PLA / PETG 3D打印件 |
| 最大高度 | 约450mm(含底座) |
| 重量 | 约1.2kg(不含电池) |
| 编程语言 | Python(pypot库) |
| 操作系统 | Raspbian / Ubuntu MATE |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印躯干零件(PLA/PETG) | 1套 | — | 约20个独立零件 |
| Dynamixel XL-320 | 12 | — | 含配套线缆 |
| Raspberry Pi 3B+ | 1 | — | 或更高版本 |
| USB2Dynamixel适配器 | 1 | — | 用于连接舵机总线 |
| 11.1V 2200mAh LiPo电池 | 1 | — | 或7.4V~12V DC电源 |
| M3螺丝/螺母/垫片 | 1套 | — | 约50个 |
| 杜邦线/舵机延长线 | 若干 | — | 根据布线需求 |
| 摄像头/麦克风(可选) | 1 | — | 用于视觉/语音交互 |
3D 模型
能力画像
**记忆与知识检索**:3/5 — 需要查阅官方文档和舵机手册,但资料组织清晰。
**动手与操作**:4/5 — 涉及3D打印、电子焊接、机械组装,动手要求较高。
**编程与算法**:3/5 — 使用Python控制舵机运动,需理解基本控制逻辑。
**设计与建模**:2/5 — 结构件已提供,修改需掌握CAD基础。
**实验与调试**:4/5 — 需调试舵机ID、通信参数、运动轨迹,反复测试。
**协作与分享**:3/5 — 社区活跃,可提交Issue或Pull Request贡献代码。
**学习与研究**:5/5 — 完美适配机器人学、控制理论、人机交互等课程实验。
**系统集成**:3/5 — 需整合硬件、固件、软件及可选外设(如摄像头)。
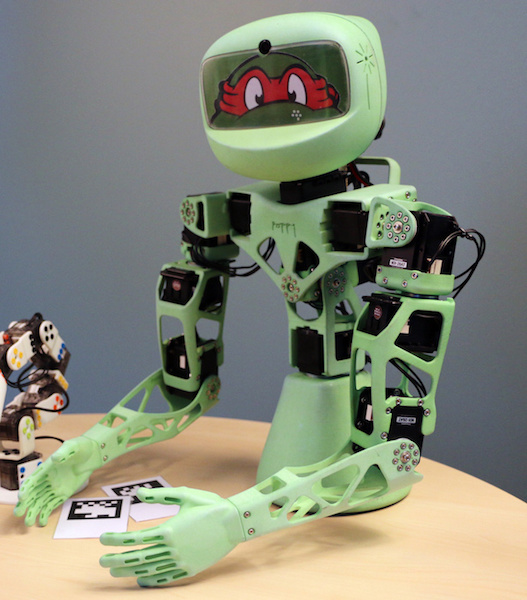
项目图库

所需技能
基础电子知识(焊接、电路连接)
机械组装能力(使用螺丝刀、扳手)
Python编程基础(控制舵机、读取传感器)
3D打印操作(切片、打印、后处理)
基本Linux命令行操作(SSH、文件管理)
理解串口通信与舵机协议
适用场景
高校机器人学课程实验平台
仿生运动控制与步态研究
人机交互(HRI)行为实验
开源硬件创客工作坊与竞赛
低成本教学机器人原型开发
多机器人协同控制研究